具有电磁启闭功能的智能垃圾箱的制作方法
1.本实用新型涉及垃圾回收领域,具体是一种具有电磁启闭功能的智能垃圾箱。
背景技术:
2.在垃圾回收领域中,在用户将投放垃圾时,用户需要用手将垃圾桶的盖子打开,然后才能够将垃圾投放在垃圾桶等垃圾回收设施中。
3.现有技术中,已经出现了智能的垃圾桶,可通过指纹或按钮或触摸屏等控制垃圾桶上的盖子开启,从而方便了用户投放垃圾。但是,无论是指纹识别、按钮控制或触摸屏控制,用户的手或手指均需要触碰到对应的指纹识别装置、或按钮装置、或触摸屏,才能够实现智能控制垃圾桶的盖子的开启。
4.因此,在现有技术中,在避免用户触碰到垃圾桶上的控制装置的条件下,如何实现对垃圾桶的盖子的智能启闭功能,成为要解决的技术问题。
技术实现要素:
5.为解决现有技术中,在避免用户触碰到垃圾桶上的控制装置的条件下,如何实现对垃圾桶的盖子的智能启闭功能的技术问题,本实用新型提供一种具有电磁启闭功能的智能垃圾箱。
6.根据本实用新型的一个方面,提供一种具有电磁启闭功能的智能垃圾箱,包括电磁组件、箱体、箱门和称重组件;
7.所述箱体上设置有箱口,所述箱门可活动的覆盖在所述箱口上;
8.所述称重组件和所述电磁组件电性连接,其中,所述称重组件用于向所述电磁组件发送重量信息,所述箱门相对于所述箱体具有闭合状态和开启状态,所述电磁组件用于根据所述重量信息控制所述箱门在所述闭合状态和所述开启状态之间切换。
9.进一步的,所述电磁组件包括电磁推杆和螺旋弹簧;
10.所述电磁推杆具有活动端和固定端,所述活动端和所述箱门连接,所述固定端和所述箱体连接;
11.所述螺旋弹簧的其中一端连接在所述箱门上,所述螺旋弹簧的其中另一端和所述固定端连接,当所述电磁推杆通电时,所述活动端远离所述固定端,所述螺旋弹簧呈拉伸状态,当所述电磁推杆断电时,所述螺旋弹簧呈收缩状态的驱动所述活动端接近所述固定端。
12.进一步的,所述电磁组件还包括支架;
13.所述支架相对于所述箱体可拆卸的连接;
14.所述固定端设置在所述支架上。
15.进一步的,所述电磁组件还包括电磁控制器;
16.所述电磁控制器和所述电磁推杆电性连接,其中,所述电磁控制器用于接收所述重量信息,所述电磁控制根据所述重量信息控制所述电磁推杆在通电和断电之间切换。
17.进一步的,所述称重组件包括踩踏部件和称重传感器;
18.所述踩踏部件设置在所述箱体的外部,所述称重传感器设置在所述踩踏部件上;
19.当踩踏部件上承载有重物时,所述称重传感器可发出重量电信号。
20.进一步的,所述踩踏部件包括基座、踏板和弹簧;
21.所述基座和所述踏板之间设置有所述弹簧,其中,当所述踏板上承载有重物时,所述踏板和所述基座紧贴,所述弹簧被压缩,当所述踏板上失去重物时,所述弹簧驱动所述踏板和所述基座分离;
22.所述称重传感器设置在所述踏板和所述基座之间,所述重量传感器和所述弹簧相互分离。
23.进一步的,所述称重组件还包括称重控制电路;
24.所述称重控制电路和所述称重传感器电性连接,且所述称重控制电路和所述电磁控制器电性连接,其中,所述称重控制电路用于接收所述重量电信号,当所述重量信息号满足所述重量阈值时,所述称重控制电路向所述电磁控制器输出所述重量信息。
25.本实用新型提供的具有电磁启闭功能的智能垃圾箱,通过设置称重组件,可以产生用于控制箱门相对于箱体上的箱口开启的重量信息,以及,利用重量信息,电磁组件可以快速的驱动箱门的开启,在失去重量信息的条件下,电磁组件断电而使得箱门相对于箱门相对于箱口关闭,从而解决了现有技术中,在避免用户触碰到垃圾桶上的控制装置的条件下,如何实现对垃圾桶的盖子的智能启闭功能的技术问题。
附图说明
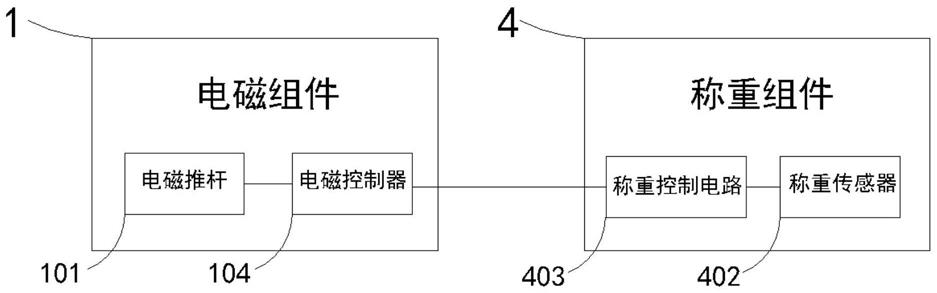
26.图1为本实用新型实施例1提供的具有电磁启闭功能的智能垃圾箱的电性连接图;
27.图2为本实用新型实施例1提供的具有电磁启闭功能的智能垃圾箱的结构示意图;
28.图3为本实用新型实施例1提供的电磁组件的结构示意图;
29.图4为本实用新型实施例1提供的踩踏部件和称重传感器的结构示意图。
具体实施方式
30.实施例1:
31.参见图1或图2,在本实施例中,提供一种具有电磁启闭功能的智能垃圾箱,包括电磁组件1、箱体2、箱门3和称重组件4;
32.箱体2上设置有箱口,箱门3可活动的覆盖在箱口上;
33.称重组件4和电磁组件1电性连接,其中,称重组件4用于向电磁组件1发送重量信息,箱门3相对于箱体2具有闭合状态和开启状态,电磁组件1用于根据重量信息控制箱门3在闭合状态和开启状态之间切换。
34.其中,当用户站立在称重组件4上时,称重组件4根据承载的用户的体重,能够向电磁组件1发出重量信息;电磁组件1根据该重量信息而实现通电或断电。当电磁组件1通电时,电磁组件1可驱动箱门3相对于箱体2的箱口,从闭合状态转变为开启状态;在箱门3呈开启状态时,用户可直接将垃圾通过箱口投放到箱体2内;当用户离开称重组件4时,称重组件4失去了承载的用户的体重,从而向电磁组件1发送的重量信息中断。在用户使用本实施例的具有电磁启闭功能的智能垃圾箱的过程中,用户不需要用手触摸智能垃圾箱的本体,通过称重组件4感受到用户的体重而产生控制箱门3开启的控制信号。
35.电磁组件1至少能够具有直线运动的功能,也就是说,当电磁组件1通电时,电磁组件1能够沿着直线方向驱动箱门3相对于箱体2上的箱口开启。此外,在电磁组件1已有的直线运动功能的基础上,电磁组件1还可以包括连杆机构或齿轮机构等辅助部件,从而增大电磁组件1驱动箱门3的距离或角度,也就是说,在具有连杆机构或齿轮机构等辅助部件的条件下,电磁组件1驱动箱门3的路径,可以由直线驱动转变为曲线驱动或旋转驱动。电磁组件1可以采用现有技术中的电磁装置,只要能够适用于本实施例的具有电磁启闭功能的智能垃圾箱,且能够至少沿着直线方向推动箱门3即可。采用电磁组件1控制本实施例中的箱门3相对于箱体2上的箱口的开启或关闭,一方面,电磁组件1的结构比较简单,体积比较小,比较适合应用在垃圾桶或垃圾箱等垃圾回收装置上,另一方面,电磁组件1的动作速度比较快,可以减少箱门3相对于箱体2的箱口的开启时间,进而减少用户等待箱口开启的时间。
36.称重组件4可以简单的理解为具有输出控制信号功能的电子秤。也就是说,称重组件4可以采用现有技术中的电子秤进行改造而获得,只要电子秤具有输出控制信号功能即可。本实施例中的具有电磁启闭功能的智能垃圾箱,其称重组件4用于直接输出重量信息,并通过重量信息来控制箱门3的开启。这是因为,在现实中,垃圾桶或垃圾箱等设置在露天的情况下,可能有流浪猫或流浪狗等动物在垃圾桶或垃圾箱处,如果这些动物站在称重组件4上,称重组件4可以感受到动物的重量而发出开启箱门3的控制信号;这种情况下,无疑会增加垃圾桶或垃圾箱的用电量、使用频次等。所以,采用称重组件4输出重量信息的方式,可以将重量信息和重量阈值进行对比,从而使得本实施例的具有电磁启闭功能的智能垃圾箱,能够判断出是否有用户需要投放垃圾。
37.本实施例的具有电磁启闭功能的智能垃圾箱,通过设置称重组件4,可以产生用于控制箱门3相对于箱体2上的箱口开启的重量信息,以及,利用重量信息,电磁组件1可以快速的驱动箱门3的开启,在失去重量信息的条件下,电磁组件1断电而使得箱门3相对于箱门3相对于箱口关闭,从而解决了现有技术中,在避免用户触碰到垃圾桶上的控制装置的条件下,如何实现对垃圾桶的盖子的智能启闭功能的技术问题。
38.进一步的,参见图1或图3,在本实施例中,电磁组件1包括电磁推杆101和螺旋弹簧102;
39.电磁推杆101具有活动端和固定端,活动端和箱门3连接,固定端和箱体2连接;
40.螺旋弹簧102的其中一端连接在箱门3上,螺旋弹簧102的其中另一端和固定端连接,当电磁推杆101通电时,活动端远离固定端,螺旋弹簧102呈拉伸状态,当电磁推杆101断电时,螺旋弹簧102呈收缩状态的驱动活动端接近固定端。
41.电磁推杆101可以直接应用在本实施例的具有电磁启闭功能的智能垃圾箱中,用于直接驱动箱门3的开启或关闭,也可以增设前述的连杆机构或齿轮机构等,通过电磁推杆101配合连杆机构或齿轮机构形成驱动箱门3的开启或关闭。
42.电磁推杆101的具体结构包括动铁芯和静铁芯,其中的动铁芯上设置有推杆;当静铁芯通电时,静铁芯产生第一磁场,而动铁芯具有第二磁场,第一磁场和第二磁场呈同级相斥状态,从而静铁芯推动动铁芯进行移动,进而动铁芯驱动推杆沿着直线方向运动。
43.采用电磁推杆101控制箱门3的开启和关闭,具有两种使用方式。第一种使用方式,在电磁推杆101通电状态下,推动箱门3开启,第二种使用方式,在电磁推杆101通电状态下,推动箱门3关闭。本实施例中,采用第一种使用方式。
44.具体的,电磁推杆101的活动端和箱门3连接,螺旋弹簧102的其中一端连接于箱门3,而另一端连接于电磁推杆101的固定端,并且,在常态下,螺旋弹簧102应当处于略微拉伸箱门3的状态,使得常态下的箱门3相对于箱体2上的箱口呈关闭状态;当电磁推杆101通电时,活动端驱动箱门3进行移动,使得箱门3相对于箱体2上的箱口从关闭状态转变为分离状态,此时,螺旋弹簧102继续被拉伸;当电磁推杆101断电时,螺旋弹簧102拉动箱门3进行运动,且同时间接的拉动电磁推杆101的活动端,使得箱门3相对于箱体2上的箱口从开启状态转变为关闭状态。
45.进一步的,参见图3,在本实施例中,电磁组件1还包括支架103;
46.支架103相对于箱体2可拆卸的连接;
47.固定端设置在支架103上。
48.采用支架103将电磁组件1设置在箱体2上,可以便于电磁组件1相对于箱门3的定位。例如,在本实施例的其中一个应用场景中,箱门3和箱口所在的平面相互平行,且箱门3的移动方向和箱口所在的平面相互平行,此时,由于电磁组件1的厚度比箱门3厚,从而难以直接的将电磁组件1分别与箱门3和箱体2连接,需要配合支架103以及其他连接部件,使得电磁组件1中的电磁推杆101的活动端通过其他连接部件连接于箱门3,以及使得电磁推杆101的固定端可连接于箱体2。又如,在本实施例的其中另一个应用场景中,箱门3和箱口所在的平面相互平行,但箱门3相对于箱口呈转动方式的开启,这就使得电动推杆难以直接的连接箱门3和箱体2,此时,可通过设置支架103和前述的连杆机构或齿轮机构等,将电动推杆的活动端与连杆机构或齿轮机构连接,在通过连杆机构或齿轮机构连接于箱门3,同时,将电动推杆的固定端通过支架103设置在箱体2上即可。再如,在本实施例的又一个应用场景中,箱口所在的平面相对于箱体2的其他平面呈交叉状态,使得箱口的开口方向相对于箱体2呈倾斜状态,而箱门3覆盖在箱口上,此时,无法直接将电磁组件1与箱体2和箱盖连接,即便是直接连接,由于电动推杆的直线运动特性,会造成驱动箱门3的运动过程中出现对箱门3和/或箱体2的损伤,这种情况下,应当采用如前述的支架103和与连杆机构或齿轮机构的方式,将电磁推杆101进行固定即可。
49.进一步的,参见图1,在本实施例中,电磁组件1还包括电磁控制器104;
50.电磁控制器104和电磁推杆101电性连接,其中,电磁控制器104用于接收重量信息,电磁控制根据重量信息控制电磁推杆101在通电和断电之间切换。
51.电磁控制器104可以采用具有单片机的电路实现,电磁控制器104可以和电磁推杆101集成为一体,也可以是独立于电磁推杆101的独立部件。电磁控制器104利用重量信息将电磁推杆101进行通电操作或断电操作;其中,当电磁控制器104未接收到重量信息时,电磁控制器104保持当前状态,使得电磁推杆101呈断电状态,此时的箱门3相对于箱体2上的箱口关闭;以及,当电磁控制器104接收到重量信息时,电磁控制器104用于将电磁推杆101进行通电操作。
52.此外,电磁控制器104可与外部电源连接,用于获取电能;电磁控制器104可设置有继电单元,当电磁控制器104获得重量信息时,电磁控制器104可根据预设程序导通继电单元,将外部电源和电磁推杆101导通,使得电磁推杆101得电;反之,当电磁控制器104失去重量信息时,电磁控制器104的继电单元断开,使得外部电源和电磁推杆101断开,电磁推杆101断电。
53.进一步的,参见图1、图2或图4,称重组件4包括踩踏部件401和称重传感器402;
54.踩踏部件401设置在箱体2的外部,称重传感器402设置在踩踏部件401上;
55.当踩踏部件401上承载有重物时,称重传感器402可发出重量电信号。
56.其中,当用户站立在踩踏部件401上时,踩踏部件401上的称重传感器402可产生重量电信号,并对重量电信号进行判断,如果满足预设条件,则生成重量信息,并向电磁组件1发送重量信息。
57.优选的,参见图4,踩踏部件401包括基座411、踏板412和弹簧413;
58.基座411和踏板412之间设置有弹簧413,其中,当踏板412上承载有重物时,踏板412和基座411紧贴,弹簧413被压缩,当踏板412上失去重物时,弹簧413驱动踏板412和基座411分离;
59.称重传感器402设置在踏板412和基座411之间,称重传感器402和弹簧413相互分离。
60.当用户站立在踏板412上时,踏板412向基座411方向移动,踏板412和基座411相互接近,此时弹簧413被压缩;反之,当用户离开踏板412之后,弹簧413的弹力推动踏板412,使得踏板412和基座411分离。
61.当踏板412向基座411方向移动时,踏板412和基座411之间的间距减小,从而使得踏板412和基座411共同压迫称重传感器402,使得称重传感器402产生形变,从而称重传感器402输出的重量电信号发生从零至用户体重的改变。反之,当用户离开踏板412时,踏板412和基座411之间的间距增大,称重传感器402发生从用户体重至零的改变。称重传感器402可以采用现有技术中的称重传感器部件,只要该称重传感器部件的量程适用于用户体重即可。
62.优选的,参见图1,称重组件4还包括称重控制电路403;
63.称重控制电路403和称重传感器402电性连接,且称重控制电路403和电磁控制器104电性连接,其中,称重控制电路403用于接收重量电信号,当重量信息号满足重量阈值时,称重控制电路403向电磁控制器104输出重量信息。
64.称重控制电路403接收到重量电信号之后,称重控制电路403能够将重量电信号按照预设程序转变为重量数值,并将重量数值和重量阈值进行对比;当对比结果为重量数值符合重量阈值时,称重控制电路403输出重量信息;当对比结果为不符合重量阈值时,称重控制电路403中断输出重量信息。
65.应当理解的是,重量电信号为用户的实际体重的电信号,或者重量电信号为动物或其他重物的电信号;将重量电信号转换为重量数值后,重量数值的单位为公斤,对应的时,重量阈值的单位应当是公斤,从而便于技术人员直接将符合用户体重的重量阈值设置在称重控制电路403中;称重控制电路403输出的重量信息应当为数字量参数,当重量数值满足重量阈值时,重量信息为真,当重量数值不满足重量阈值时,重量信息为假。
66.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1