一种曝光系统的制作方法
1.本实用新型属于曝光设备领域,尤其涉及一种曝光系统。
背景技术:
2.现有的曝光系统的自动化两次太低,且通常是人工将托盘取走进行码垛,同时工序流程繁琐,导致精度控制复杂,从而使得加工精度低,同时次品率高。
技术实现要素:
3.为了解决上述技术问题,本实用新型的目的在于提供一种结构简单,且自动化程度高,加工效率高的曝光系统。
4.为了实现上述目的,本实用新型的技术方案如下:一种曝光系统,包括输送件、托盘取走件、第一工件取走件、托盘码垛件、定位机构、第二工件取走件和曝光设备,所述输送件用以由前向后输送装有工件的托盘,所述托盘码垛件设置在所述输送件出料端的一侧,所述第一工件取走件设置在所述输送件出料端的另一侧,所述定位机构设置在所述输送件的后方,所述曝光设备设置在所述定位机构的后方,所述托盘取走件设置在所述输送件的出料端处,所述第二工件取走件设置在所述定位机构与曝光设备之间的一侧,所述第一工件取走件用以将所述输送件出料端处的托盘上的工件取走至所述定位机构进行定位,所述托盘取走件用以将所述输送件出料端的托盘取走至置于所述托盘码垛件上进行码垛,所述第二工件取走件用以将所述定位机构上的工件取走至曝光设备进行曝光处理。
5.上述技术方案的有益效果在于:如此整个曝光工序可自动化进行,仅需人工从托盘码垛件处将码垛好的托盘及时的搬运走即可,从而使得工人的劳动强度低,另外,整个曝光工序中定位机构在工件进入到曝光设备内之前进行最终的一次定位,且整个过程对定位机构和第二工件取走件的精度要求较高。
6.上述技术方案中所述输送件为双列皮带式输送机或辊式输送机,且所述输送件的出料端竖向设有多个沿左右方向间隔分布的阻挡杆,多个所述阻挡杆用以共同将所述输送件上的托盘截停在所述输送件的出料端。
7.上述技术方案的有益效果在于:其输送方便,且平稳性好。
8.上述技术方案中所述托盘码垛件包括滑轨、托板和第一驱动件,所述滑轨竖向设置在所述输送件的对应侧,所述托板水平设置在所述滑轨背离所述输送件的一侧,并与所述滑轨滑动连接,所述第一驱动件安装在所述滑轨上,且其驱动端与所述托板传动连接,所述第一驱动件用以驱动所述托板沿所述滑轨上下移动,所述托盘取走件用以将托盘从所述输送件的出料端取走并放置在所述托板上进行码垛。
9.上述技术方案的有益效果在于:如此在初始状态时,托板位于滑轨的上端,待托板上每放入一个托盘后托板便在第一驱动件的驱动下下降一个托盘对应的高度,直至托板下降至最低位即可取走其上码垛的托盘。
10.上述技术方案中所述托盘取走件包括第一机械臂和机械夹爪,所述第一机械臂安
装在所述输送件的出料端处,所述机械夹爪安装在所述第一机械臂的驱动端。
11.上述技术方案的有益效果在于:其结构简单,加工效率高。
12.上述技术方案中所述机械夹爪包括第二驱动件和一根沿左右方向水平放置的载板,所述载板下端的两侧分别滑动设有一个竖直设置的夹板,两个所述夹板的下端分别设有弯折至相互靠近的弯折部,所述第二驱动件安装在所述载板上,且其驱动端与两个所述夹板传动连接,其用以驱动两个所述夹板移动至相互靠近以将所述托盘两侧夹持或移动至相互远离以将所述托盘的两侧松开。
13.上述技术方案的有益效果在于:其结构简单,且能便捷的将输送件出料端的托盘水平夹取。
14.上述技术方案中所述定位机构具有定位工位,所述定位工位用以放置一个工件,所述定位机构用以对所述定位工位上的工件进行定位。
15.上述技术方案的有益效果在于:如此使得其加工精度高,且使得次品率降低。
16.上述技术方案中所述第一工件取走件包括第二机械臂,所述第二机械臂的驱动端具有多个吸盘,所述第二机械臂安装在所述输送件出料端远离所述托盘码垛件的一侧,所述第一工件取走件用以将位于所述输送件出料端的托盘上的工件取走至放置在所述定位机构的定位工位上。
17.上述技术方案的有益效果在于:其结构简单,且控制方便。
18.上述技术方案中所述曝光设备具有上料工位,所述第二工件取走件用以将所述定位机构上的工件取走至所述曝光设备的上料工位。
19.上述技术方案的有益效果在于:其结构简单。
20.上述技术方案中所述第二工件取走件包括第三机械臂,所述第三机械臂驱动端具有多个吸盘,所述第二工件取走件用以将所述定位机构定位工位上的工件取走至曝光设备的上料工位上。
21.上述技术方案的有益效果在于:其结构简单,且控制方便。
附图说明
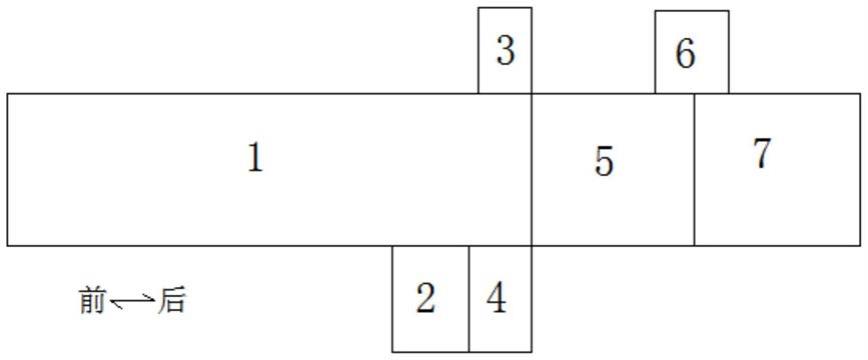
22.图1为本实用新型实施例所述的曝光系统的结构简图;
23.图2为本实用新型实施例所述输送件、托盘取走件、第一工件取走件、托盘码垛件、定位机构和第二工件取走件的配合图;
24.图3为本实用新型实施例所述输送件的结构简图;
25.图4为本实用新型实施例所述机械夹爪的结构简图;
26.图5为本实用新型实施例所述托盘码垛件和推车的配合图。
27.图中:1输送件、11阻挡杆、2托盘取走件、21第一机械臂、22机械夹爪、 221第二驱动件、222载板、223夹板、3第一工件取走件、4托盘码垛件、41 滑轨、42托板、43第一驱动件、5定位机构、6第二工件取走件、7曝光设备、8推车、81支架、9托盘。
具体实施方式
28.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
29.如图1和图2所示,本实施例提供了一种曝光系统,包括输送件1、托盘取走件2、第一工件取走件3、托盘码垛件4、定位机构5、第二工件取走件6 和曝光设备7,所述输送件1用以由前向后输送装有工件的托盘9,所述托盘码垛件4设置在所述输送件1出料端的一侧,所述第一工件取走件3设置在所述输送件1出料端的另一侧,所述定位机构5设置在所述输送件1的后方,所述曝光设备7设置在所述定位机构5的后方,所述托盘取走件2设置在所述输送件1的出料端处,所述第二工件取走件6设置在所述定位机构5与曝光设备7之间的一侧,所述第一工件取走件3用以将所述输送件1出料端处的托盘9上的工件取走至所述定位机构5进行定位,所述托盘取走件2用以将所述输送件1出料端的托盘9取走至置于所述托盘码垛件4上进行码垛,所述第二工件取走件6用以将所述定位机构5上的工件取走至曝光设备7进行曝光处理,如此整个曝光工序可自动化进行,仅需人工从托盘码垛件处将码垛好的托盘9及时的搬运走即可,从而使得工人的劳动强度低,另外,整个曝光工序中定位机构在工件进入到曝光设备内之前进行最终的一次定位,且整个过程对定位机构和第二工件取走件的精度要求较高。
30.如图3所示,上述技术方案中所述输送件1为双列皮带式输送机或辊式输送机,且所述输送件1的出料端竖向设有多个沿左右方向间隔分布的阻挡杆11,多个所述阻挡杆11用以共同将所述输送件1上的托盘9截停在所述输送件1的出料端,其输送方便,且平稳性好。其中,阻挡杆11的上端位于所述输送件输送通道的上方,其下端位于于所述输送件输送通道的下方。
31.如图5所示,上述技术方案中所述托盘码垛件4包括滑轨41、托板42和第一驱动件43,所述滑轨41竖向设置在所述输送件1的对应侧,所述托板42水平设置在所述滑轨41背离所述输送件1的一侧,并与所述滑轨41滑动连接,所述第一驱动件43安装在所述滑轨41上,且其驱动端与所述托板42 传动连接,所述第一驱动件43用以驱动所述托板42沿所述滑轨41上下移动,所述托盘取走件用以将托盘9从所述输送件1的出料端取走并放置在所述托板42上进行码垛,如此在初始状态时,托板位于滑轨的上端,待托板上每放入一个托盘9后托板便在第一驱动件的驱动下下降一个托盘9对应的高度,直至托板下降至最低位即可取走其上码垛的托盘9。其中,所述第一驱动件优选的直线模组。其中,还包括推车8,所述推车8车身上的两侧分别具有一个竖向设置的支架81,两个支架81间隔分布,且二者之间的间距小于托盘宽度而大于托板的宽度,如此可在托盘码垛件进行码垛时,将推车预先放置在托板的下方,且所两个支架位于托板的两侧,如此在托板上托盘愈来愈多时,当托板下降至两个支架之间,而托板上的托盘堆的两侧会搁在两个支架上,此时可人为推走推车以将托盘堆搬走。
32.上述技术方案中所述托盘取走件2包括第一机械臂21和机械夹爪22,所述第一机械臂21悬设在所述输送件1的出料端处的上方,所述机械夹爪22 安装在所述第一机械臂21的驱动端,其结构简单,加工效率高。
33.如图4所示,上述技术方案中所述机械夹爪22包括第二驱动件221和一根沿左右方向水平放置的载板222,所述载板下端的两侧分别滑动设有一个竖直设置的夹板223,两个所述夹板223的下端分别设有弯折至相互靠近的弯折部,所述第二驱动件221安装在所述载板222上,且其驱动端与两个所述夹板223传动连接,其用以驱动两个所述夹板223移动至相互靠近以将所述托盘9两侧夹持或移动至相互远离以将所述托盘9的两侧松开,其结构简
单,且能便捷的将输送件出料端的托盘水平夹取。
34.上述技术方案中所述定位机构5具有定位工位,所述定位工位用以放置一个工件,所述定位机构5用以对所述定位工位上的工件同步进行定位,如此提高其加工精度,降低次品率。
35.上述技术方案中所述第一工件取走件3包括第二机械臂,所述第二机械臂的驱动端具有多个吸盘,所述第二机械臂安装在所述输送件1出料端远离所述托盘码垛件4的一侧,所述第一工件取走件3用以将位于所述输送件1 出料端的托盘9上的工件取走至放置在所述定位机构5的定位工位上,其结构简单,且控制方便。
36.上述技术方案中所述曝光设备7具有上料工位,所述第二工件取走件6 用以将所述定位机构5上的工件取走至所述曝光设备7的上料工位,其结构简单。
37.上述技术方案中所述第二工件取走件6包括第三机械臂,所述第三机械臂驱动端具有多个吸盘,所述第二工件取走件6用以将所述定位机构5定位工位上的工件取走至曝光设备7的上料工位上,其结构简单,且控制方便。
38.其中,所述第一机械臂优选的为一个电动十字滑台,其用以驱动所述机械夹爪沿左右方向和上下方向移动,其带动所述机械夹爪在所述输送件和托盘码垛件的上方左右移动和上下移动。
39.所述第二机械臂和第三机械臂类似,均可优选的为一个电动三维移动件,其用以驱动其上的吸盘在空间内做三维(上下前后左右)移动,所述第二机械臂和第三机械臂可均苏州灵猴机器人有限公司所生产的tm20
‑
r650型的机械手,当然不仅限于此。
40.其中,第二驱动件优选为双作用滑台气缸。
41.所述定位机构可采用现有的ccd自动对位平台(可为xyθ对位平台),且所述ccd自动对位平台可设置多个,如此组成形成一个具有多个定位工位的定位机构。
42.所述曝光设备可直接采用市购的ldi激光直接成像曝光机,当然不仅限于此。
43.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1