一种风电场专用移动吊机的制作方法
1.本实用新型涉一种风电场专用移动吊机,适用于风电场风机塔筒、高压带电设备等空间狭窄、设备布置复杂区域的吊物作业,吊物的重量范围800kg以下,起吊高度0m至3.2m的范围。
背景技术:
2.受制于风机塔筒和高压带电设备布置复杂、空间狭窄等条件,风电场重物低空搬运、起吊完全依赖人力完成,如电抗器、干变、电机、避雷器等重物的搬运基本是由人力搬运完成。人力搬运的方式体力消耗过大,而且存在重物跌落砸伤检修人、造成设备损伤、误碰带电设备的风险。因此风电场迫切需要该型专用小型低空重物桁架式吊机,减轻工人工作负担,提高效率,保障检修人员和被搬运设备的安全。
3.现有专利如公告号cn110498351a公示的一种车载塔式高空作业系统,又如专利公告号cn201634336u公示的可伸缩式移动塔吊,两者技术方案中的回转机构均设置在塔吊上,这样的布置方式使整个系统尺寸过大,不适用于起吊高度0m至3.2m的范围。
技术实现要素:
4.本实用新型的目的在于提供一种风电场专用移动吊机,能适用于风电场风机塔筒、高压带电设备等空间狭窄的吊物作业。
5.本实用新型的技术方案是:一种风电场专用移动吊机包括移动底盘和设于所述移动底盘上的吊臂,还包括牵引系统、主控系统和操作台;所述牵引系统包括滑轮组、吊索、吊钩、卷扬机和用于感应所述吊钩挂取的重物重量的保护装置,所述滑轮组分别设置在所述吊臂上,所述吊索的一端绕转所述滑轮组并与吊钩连接,所述吊索的另一端与所述卷扬机相连;
6.所述吊臂通过转向系统转动连接在所述移动底盘上,所述转向系统的转动轴与地面垂直;所述移动底盘、牵引系统、转向系统、操作台、保护装置、卷扬机和主控系统电连接;所述卷扬机设置在所述转向系统上。
7.上述方案中,将转向系统设置在移动底盘上,相对于现用技术设置在塔吊上,其能够很好的实现起吊高度0m至3.2m的范围,能适用于风电场风机塔筒、高压带电设备等空间狭窄的吊物作业。另外,通过优化牵引系统的结构,使起吊工作更加安全。
8.优选的,所述吊机包括第一臂和第二臂,所述第一臂竖向设置并与所述转向系统连接,所述第二臂水平安装在所述第一臂上;所述滑轮组包括第一滑轮和第二滑轮,所述第二臂的一端连接所述第一滑轮,所述第一滑轮与所述卷扬机位置相对;所述第二臂的另一端设置所述第二滑轮,所述吊索绕转第二滑轮后与所述吊钩相连,所述第二滑轮沿所述第二臂滑动连接。
9.优选的,所述转向系统的转动角度为360
°
。
10.优选的,还包括遥控操作装置和信号接收系统,所述遥控操作装置通过信号接收
系统与所述主控系统电连接;所述主控系统和信号接收系统均设置在所述移动底盘上。
11.优选的,还包括与所述主控系统电连接的电压感应报警系统,所述电压感应报警系统设于所述吊机临近吊钩的水平延伸端上。
12.优选的,所述移动底盘为四轮液压底盘。
13.优选的,所述吊臂为桁架式结构。
14.与相关技术相比,本实用新型的有益效果为:
15.一、设计新颖:采用四轮液压底盘(小型)、转向系统(电动控制)、桁架式吊臂的结构布局,且桁架结构风阻小,更有利于风电场中、低风速时的作业安全;
16.二、灵活性:采用四轮液压底盘,可流动作业,不受风电场复杂地形条件限制。可适应风电场地形、带电设备等复杂条件区域的作业;
17.三、高效性:采用吊臂起吊重物,实现机械化作业,减少检修人员体力消耗,提高检修作业的效率;
18.四、操作方便简单:采用集成控制系统和无线遥控装置,可实现遥控操作,操作整机进行站位调整,操作塔式吊机进行重物的搬运和吊装;
19.五、安全性:设置有电压感应报警系统,在搬运重量大的设备时有效防范重物搬运过程中坠落砸伤检修人员和造成设备损伤的风险,临近高电压区域报警,吊物作业时与带电体安全距离不够是报警并紧急停机,安全性好;
20.六、重量轻:桁架式吊臂,极大地减轻了整机的重量;
21.七、能够适用于风电场的风机塔筒、高压带电设备区域等空间狭窄、设备布置复杂区域的低空重物搬运、起吊作业;具有作业灵活、高效、安全等优点。
附图说明
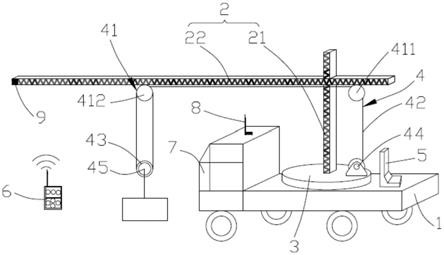
22.图1为本实用新型提供的风电场专用移动吊机的结构示意图;
23.图2为本实用新型提供的风电场专用移动吊机使用时的结构示意图。
具体实施方式
24.以下将参考附图并结合实施例来详细说明本实用新型。需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。为叙述方便,下文中如出现“上”、“下”、“左”、“右”字样,仅表示与附图本身的上、下、左、右方向一致,并不对结构起限定作用。
25.如图1所示,本实施例提供的一种风电场专用移动吊机包括移动底盘1、吊臂2、转向系统3、牵引系统4、操作台5、遥控操作装置6、主控系统7、信号接收系统8和电压感应报警系统9。
26.所述移动底盘1可选用小型四轮液压底盘,其搭载整机进行流动作业,液压底盘可以满足作业时整机平衡。当整机找平接收,液压底盘能锁定当前的工况,使移动底盘1保持平衡。
27.所述移动底盘1上设有所述转向系统3,所述吊臂2包括第一臂21和第二臂22,所述第一臂21竖向设置并与所述转向系统3连接,所述第二臂22水平安装在所述第一臂21上。所述第一臂21和第二臂22均为桁架结构。所述转向系统3能带动吊臂2实现360
°
转动,以满足
重物吊运不同位置要求,所述转向系统3的转动轴与地面垂直。所述转向系统3为电控,控制简单且可靠性高。
28.所述牵引系统4包括滑轮组41、吊索42、吊钩43、卷扬机44和用于感应所述吊钩43挂取的重物重量的保护装置45。所述卷扬机44均设置在所述转向系统3上,与所述转向系统3一同转动。所述转向系统3可选用回转支承。
29.所述滑轮组41包括第一滑轮411和第二滑轮412。所述第二臂22的一端连接所述第一滑轮411,所述第一滑轮411与所述卷扬机44位置相对。所述第二臂22的另一端设置所述第二滑轮412,所述第二滑轮412沿所述第二臂22滑动连接。所述吊索42的一端依次绕转第一滑轮411和第二滑轮412后,与所述吊钩43相连,所述吊索42的另一端与所述卷扬机44相连。所述保护装置45与所述吊钩43临近设置。
30.所述操作台5、主控系统7和信号接收系统8均设置在所述移动底盘1上。所述移动底盘1、牵引系统4、转向系统3、操作台5、保护装置45、卷扬机44和主控系统7电连接。
31.所述牵引系统4通过卷扬机44的收卷,实现重物的起吊和释放,其为重物的吊运提供动力,通过滑动设置的第二滑轮,实现重物平行于第二臂运动。当被吊重物超重(吊物的重量在800kg以下)时,所述保护装置45发送信号给主控系统7,通过主控系统7发出的指令,使卷扬机动作将重物释放于地面,并停机报警,提示超重。所述保护装置45可为重量感应器。
32.所述操作台5为手动操作台,便于工人操作吊机作业。所述遥控操作装置6应用于作业视野不良时,所述信号接收系统8用于接收遥控操作装置6发出的信号,并传输给主控系统7。
33.所述主控系统7用于接收工况信息:如移动底盘平衡信号、底盘锁定信号、卷扬机工况、重物重量、周围电场强度、作业前系统自检信息等,进行逻辑判断,并发出指令至各执行装置。
34.所述电压感应报警系统9采集作业区域电场强度,临近高电压带电体时报警提示作业人员。当吊臂2距离高压带电体的距离低于安全距离时,主控系统7会立即下令停止作业,并控制转向系统3转动将吊臂2旋转至安全区域。
35.如图2所示,当风电场需要更换风电机组的干式变压器时,先通过所述风电场专用移动吊机将干式变压器从仓库取出放置在运输车辆上,吊机和运输车辆一同到达风电机组。通过吊臂2将干式变压器吊至风机塔筒100底部平台。
36.所述风电场专用移动吊机的工作原理为:先进行移动底盘1的找平。平衡后,通过主控系统7发送指令锁定移动底盘1,以使其保持平衡状态。
37.所述主控系统7对牵引装置4送电并进行功能测试和系统自检,由主控系统判断是否能进行作业;上述工作结束后,开始启动吊臂2进行试吊。
38.当重物超载时,重物被放于运输车辆或地面,并报警提示操作人员超重;如试吊通过,则进行重物的正式起吊:先把重物吊起,然后控制转向系统3旋转带动吊臂2进行旋转。当旋转至合适的位置时,转向系统3停止,并锁定转向系统3当前位置;系统启动吊索42,吊运重物至相应位置,作业结束。
39.吊机作业过程采用手动操作台或遥控操作装置进行操作。主控系统7对各工况信息进行实时在线检测,当超载时,通过保护装置和主控系统执行保护动作。电压感应报警系
统采集作业区域电场强度,临近高电压带电体时报警提示作业人员。当吊臂距离高压带电体的距离低于安全距离时,主控系统会立即下令停止作业,并控制转向系统转动将吊臂旋转至安全区域。
40.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1