一种集装箱式车厢自动装车系统的制作方法
1.本实用新型涉及一种集装箱式车厢自动装车系统,属于工业自动化技术领域。
背景技术:
2.送料装车控制系统在生产制造、冶金、采矿运输等许多领域中都得到了普遍的应用,但目前市场上比较多的自动装车系统主要以敞篷式车厢为主,集装箱式车厢大部分仍然采用传统的叉车装车和人力装车等方式,传统的装车方式存在劳动强度大,危险度高,效率低等问题,随着市场的需求这些问题迫切需要解决。
技术实现要素:
3.为了克服上述现有技术的不足之处,本实用新型提供一种集装箱式车厢自动装车系统,解决集装箱式车厢装车问题。
4.本实用新型是通过如下技术方案实现的:一种集装箱式车厢自动装车系统,其特征在于:包括车辆定位系统、托盘输送线系统、运载皮带机系统、机器人控制系统和货叉输送线系统,托盘输送线系统设置在车辆定位系统和货叉输送线系统之间,机器人控制系统设置在托盘输送线系统两侧,运载皮带机系统设置在托盘输送线系统和货叉输送线系统两侧,运输车辆停止在车辆定位系统上;
5.所述的车辆定位系统包括激光测距传感器、光电传感器和限位开关,车辆开始进入装配区后光电传感器响应,车辆碰到限位开关时停止,激光测距传感器开始判断车辆停放是否满足装配条件,若满足则继续执行下一步,若不满足则语音提醒重新停车;
6.所述的托盘输送线系统包括伺服电机和接近开关,托盘输送线系统开启后按下复位键托盘执行回零动作,托盘执行回零动作完成后等待机器人装料,机器人开始为其中一个托盘装料,该托盘装料完成后机器人开始为另一个托盘装料,同时已装满物料托盘开始往货叉装货位移动,托盘移动到位、货叉抬起货物后托盘开始回零;
7.所述的运载皮带机系统包括变频电机、光电传感器和气缸,当检测到物料流下后运输皮带机主变频电机开始运行,当物料到达姿态异形检测区域时执行气缸导正物料姿态,当物料到达压实检测区域时执行气缸进行压实操作,当物料到达缓冲区后开启缓冲线变频电机,当物料到达机器人抓取物料位停止缓冲线。
8.所述的车辆定位系统包括2个激光测距传感器、1个光电传感器和1个限位开关,激光测距传感器、光电传感器和限位开关向系统界面实时播报车辆到位信息,车辆停止不到位时提醒“车辆未到位,请重新停车”。
9.所述的托盘输送线系统包括4个伺服电机和12个接近开关。
10.所述的运载皮带机系统包括2个变频电机、4个光电传感器和3个气缸,所述的机器人控制系统由plc与机器人pn通讯完成。
11.本实用新型的有益效果是:高效装卸货物;降低人力成本和劳动强度;提高作业安全。
附图说明
12.下面根据附图和实施例对本实用新型进一步说明。
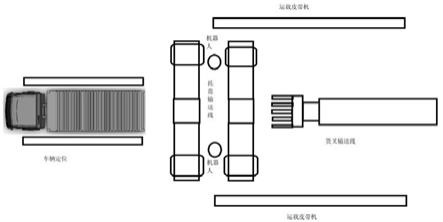
13.图1是本实用新型的原理示意图;
14.图2是本实用新型的系统界面示意图;
15.图中:1、车辆定位系统,2、托盘输送线系统,3、运载皮带机系统,4、机器人控制系统,5、货叉输送线系统。
具体实施方式
16.如图1和图2所示的一种集装箱式车厢自动装车系统,其特征在于:包括车辆定位系统1、托盘输送线系统2、运载皮带机系统3、机器人控制系统4和货叉输送线系统5,托盘输送线系统2设置在车辆定位系统1和货叉输送线系统5之间,机器人控制系统4设置在托盘输送线系统2两侧,运载皮带机系统3设置在托盘输送线系统2和货叉输送线系统5两侧,运输车辆停止在车辆定位系统1上;
17.所述的车辆定位系统1包括激光测距传感器、光电传感器和限位开关,车辆开始进入装配区后光电传感器响应,车辆碰到限位开关时停止,激光测距传感器开始判断车辆停放是否满足装配条件,若满足则继续执行下一步,若不满足则语音提醒重新停车;
18.所述的托盘输送线系统2包括伺服电机和接近开关,托盘输送线系统2开启后按下复位键托盘执行回零动作,托盘执行回零动作完成后等待机器人装料,机器人开始为其中一个托盘装料,该托盘装料完成后机器人开始为另一个托盘装料,同时已装满物料托盘开始往货叉装货位移动,托盘移动到位、货叉抬起货物后托盘开始回零;
19.所述的运载皮带机系统3包括变频电机、光电传感器和气缸,当检测到物料流下后运输皮带机主变频电机开始运行,当物料到达姿态异形检测区域时执行气缸导正物料姿态,当物料到达压实检测区域时执行气缸进行压实操作,当物料到达缓冲区后开启缓冲线变频电机,当物料到达机器人抓取物料位停止缓冲线。
20.所述的车辆定位系统1包括2个激光测距传感器、1个光电传感器和1个限位开关,激光测距传感器、光电传感器和限位开关向系统界面实时播报车辆到位信息,车辆停止不到位时提醒“车辆未到位,请重新停车”。
21.所述的托盘输送线系统2包括4个伺服电机和12个接近开关。
22.所述的运载皮带机系统3包括2个变频电机、4个光电传感器和3个气缸,所述的机器人控制系统由plc与机器人pn通讯完成。
技术特征:
1.一种集装箱式车厢自动装车系统,其特征在于:包括车辆定位系统、托盘输送线系统、运载皮带机系统、机器人控制系统和货叉输送线系统,托盘输送线系统设置在车辆定位系统和货叉输送线系统之间,机器人控制系统设置在托盘输送线系统两侧,运载皮带机系统设置在托盘输送线系统和货叉输送线系统两侧,运输车辆停止在车辆定位系统上;所述的车辆定位系统包括激光测距传感器、光电传感器和限位开关;所述的托盘输送线系统包括伺服电机和接近开关;所述的运载皮带机系统包括变频电机、光电传感器和气缸。2.根据权利要求1所述的一种集装箱式车厢自动装车系统,其特征在于:所述的车辆定位系统包括2个激光测距传感器、1个光电传感器和1个限位开关,激光测距传感器、光电传感器和限位开关向系统界面实时播报车辆到位信息。3.根据权利要求1所述的一种集装箱式车厢自动装车系统,其特征在于:所述的托盘输送线系统包括4个伺服电机和12个接近开关。4.根据权利要求1所述的一种集装箱式车厢自动装车系统,其特征在于:所述的运载皮带机系统包括2个变频电机、4个光电传感器和3个气缸,所述的机器人控制系统由plc与机器人pn通讯完成。
技术总结
本实用新型涉及一种集装箱式车厢自动装车系统,属于工业自动化技术领域。包括车辆定位系统、托盘输送线系统、运载皮带机系统、机器人控制系统和货叉输送线系统,托盘输送线系统设置在车辆定位系统和货叉输送线系统之间,机器人控制系统设置在托盘输送线系统两侧,运载皮带机系统设置在托盘输送线系统和货叉输送线系统两侧,运输车辆停止在车辆定位系统上;本实用新型的有益效果是:高效装卸货物;降低人力成本和劳动强度;提高作业安全。提高作业安全。提高作业安全。
技术研发人员:葛康 王禹程 李强 王涛
受保护的技术使用者:安徽省矿业机电装备有限责任公司
技术研发日:2020.12.30
技术公布日:2021/12/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1