一种AGV车转运装置的制作方法
一种agv车转运装置
技术领域
1.本实用新型涉及agv小车的技术领域,尤其涉及一种agv车转运装置。
背景技术:
2.automated guided vehicle,简称agv,通常也称为agv小车。指装备有电磁或光学等自动导航装置的智能运输车。
3.智能叉车agv基于激光无轨导航技术,现场无需固定基础设施改造,减少前期投入和部署周期;具有环境地图构建、路径划、安全避障等功能。依靠其多传感器技术,实现自主导航与实时精准定位。可实现垃圾桶的自动叉取与转运,广泛应用于垃圾厂、垃圾中转站等垃圾的运送倾倒环节,助力对垃圾站清运系统实现智慧化、无人化。
4.目前,agv车结构复杂,使用不便,需要进一步进行改进。
技术实现要素:
5.本实用新型的目的是为了解决背景技术中提及的问题,提供一种agv车转运装置。
6.为实现上述技术目的,本实用新型采取的技术方案为:
7.一种agv车转运装置,其中:包括agv车外壳、导轨框架以及升降叉架,agv车外壳内安装有电池、驱动电机和智能控制器,导轨框架为竖向的方形框架,导轨框架安装在agv车外壳前部,导轨框架下端接近地面,导轨框架的左右两个竖向框体上设置有导轨,导轨框架的中部设置有中部架,中部架的左右两端分别与导轨框架的左右两个竖向框体固定连接,一升降气缸的缸体下端固定在导轨框架的下部,上端固定在中部架上,升降气缸的伸缩杆向上伸出,伸缩杆的上端固定连接动滑轮,升降叉架包括横向固定架、竖向固定架以及叉臂,竖向固定架的上端固定在横向固定架上,竖向固定架的下端与叉臂的一端连接,叉臂横向设置,叉臂的另一端伸向agv车前方,用于插在垃圾桶的底部,横向固定架的左右两侧设置有滑块,滑块卡入导轨中,并能在导轨中上下滑动,横向固定架的前侧设置有至少一个到位缓冲结构,一起重链条的一端与中部架固定连接,另一端向上绕过动滑轮后,再向下与横向固定架固定连接,升降气缸的伸缩杆伸出或收回时,能使动滑轮上下移动,从而使起重链条带动升降叉架升降,agv车外壳的下部前端设置有底部臂架,底部臂架位于叉臂的正下方,agv车外壳的底部和底部臂架的底部安装有滚轮,驱动电机与滚轮连接,用于驱动滚轮滚动,导轨框架的前端安装有激光雷达,激光雷达、驱动电机和升降气缸均与电池和智能控制器连接,激光雷达、驱动电机和升降气缸从电池获得电能,智能控制器用于接收激光雷达的信号并控制驱动电机和升降气缸运作。
8.为优化上述技术方案,采取的具体措施还包括:
9.上述的到位缓冲结构包括第一铰接轴、铰接块、第二铰接轴、滑动块、滑动轴以及牵拉弹簧,横向固定架前侧面设置有横向的滑槽,滑槽上下侧壁均设置有条形孔,条形孔竖向贯穿滑槽,条形孔左右走向,铰接块和滑动块均左右走向,第一铰接轴固定安装在滑槽中,铰接块一端与第一铰接轴铰接配合,另一端通过第二铰接轴与滑动块一端铰接配合,滑
动块另一端与滑动轴铰接连接,滑动轴位于滑槽中,且滑动轴的两端穿过对应的滑槽,滑动轴的一端与牵拉弹簧的一端连接,牵拉弹簧的另一端固定在横向固定架上,牵拉弹簧具有牵拉滑动轴的势能,将滑动块拉向铰接块,铰接块和滑动块连接处凸出至滑槽外,此时,铰接块和滑动块连接处位于横向固定架的最前端。
10.上述的叉臂包括叉臂底框架、称重模块、叉臂上板以及缓冲层,叉臂底框架包括前水平部和后竖直部,前水平部的后端与后竖直部的下端固定连接,后竖直部竖直向上延伸,前水平部水平向前延伸,称重模块固定在前水平部的上表面,缓冲层固定在称重模块上,叉臂上板固定在缓冲层上,叉臂上板的前、左和右侧向下形成上板护边,上板护边将缓冲层和称重模块遮挡,称重模块通过导线与智能控制器连接,并能将称得的重量发送至智能控制器。
11.上述的横向固定架的左右两端向前伸出有垃圾桶抱臂,垃圾桶抱臂为弹性结构制作,当叉臂插入垃圾桶底部时,两个垃圾桶抱臂合抱在垃圾桶中部两侧。
12.上述的导轨框架的上部安装有到位传感器,到位传感器与智能控制器连接,升降叉架异常冲顶时,能碰触到到位传感器。
13.上述的导轨框架顶部安装有无线信号收发器,无线信号收发器与智能控制器连接,无线信号收发器用于智能控制器与远程终端信号通讯。
14.上述的agv车外壳内安装有空气清新剂喷洒罐,空气清新剂喷洒罐的阀门与智能控制器连接,智能控制器能控制空气清新剂喷洒罐的阀门打开,使空气清新剂喷洒罐喷洒空气清新剂,agv车外壳在空气清新剂喷洒罐喷洒处开设有通气孔。
15.上述的前水平部的下表面安装有下部垫,下部垫用于防止叉臂与底部臂架硬性接触。
16.上述的agv车外壳的下部边缘安装有防撞胶条。
17.上述的agv车外壳的侧面和后面均安装有超声探头,超声探头与智能控制器连接,超声探头用于检测agv车侧面和后面的障碍物。
18.本实用新型具有以下优点:
19.1、本实用新型通过设置中部架、起重链条、升降气缸和动滑轮结构,能方便的实现升降叉架升降,整体结构简单实用。
20.2、本实用新型在横向支架前端设置到位缓冲结构,能有效防止垃圾桶被过分挤压的问题。到位缓冲结构主要由第一铰接轴、铰接块、第二铰接轴、滑动块、滑动轴以及牵拉弹簧组成,正常情况下,铰接块和滑动块连接处凸出至滑槽外,此时,铰接块和滑动块连接处位于横向固定架的最前端,当agv小车前移,叉臂持续插入垃圾桶下方,将垃圾桶置于叉臂上时,垃圾桶一侧面在接触横向支架前,会先接触到铰接块和滑动块连接处,到位缓冲结构与垃圾桶弹性接触,避免了横向支架直接顶在垃圾桶上,导致垃圾桶破裂。
21.3、本实用新型对agv小车的升降叉架进行改进,将原本的长条形叉臂改装为由叉臂底框架、称重模块、叉臂上板以及缓冲层组成的组合式结构,当agv车通过升降叉架将垃圾桶叉起时,叉臂上板能将垃圾桶重量传递至称重模块上,由称重模块称重后,将信号发送至智能控制器,从而使智能控制器得知垃圾的重量。
22.4、本实用新型内设置有空气清新剂喷洒罐,能对agv车外部进行喷洒,同时空气清新剂喷洒罐内还能混入消毒剂,对agv车外部消杀。
23.5、本实用新型设置有多处缓冲结构,如前水平部的下表面安装有下部垫,下部垫用于防止叉臂与底部臂架硬性接触、agv车外壳的下部边缘安装有防撞胶条,防止agv车外壳与墙壁碰撞等,有效保护agv车结构,提高agv车使用寿命。
附图说明
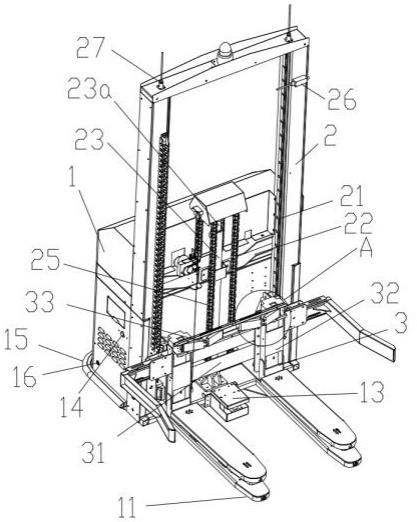
24.图1是本实用新型的结构示意图一;
25.图2是图1的a部结构放大图;
26.图3是本实用新型的结构示意图二;
27.图4是图3的叉臂结构放大图;
28.图5是叉臂内部结构图;
29.图6是本实用新型的结构示意图三;
30.图7是本实用新型的结构示意图四。
31.图中标记名称:agv车外壳1、底部臂架11、滚轮12、激光雷达13、通气孔14、防撞胶条15、超声探头16、导轨框架2、导轨21、中部架22、升降气缸23、伸缩杆23a、动滑轮24、起重链条25、到位传感器26、无线信号收发器27、升降叉架3、横向固定架31、滑块31a、条形孔31b、滑槽31c、竖向固定架32、到位缓冲结构33、第一铰接轴33a、铰接块33b、第二铰接轴33c、滑动块33d、滑动轴33e、牵拉弹簧33f、叉臂4、叉臂底框架41、前水平部41a、后竖直部41b、称重模块42、叉臂上板43、上板护边43a、缓冲层44、下部垫45、垃圾桶抱臂5。
具体实施方式
32.以下结合附图对本实用新型的实施例作进一步详细描述。
33.本实施例的一种agv车转运装置,其中:包括agv车外壳1、导轨框架2以及升降叉架3,agv车外壳1内安装有电池、驱动电机和智能控制器,导轨框架2为竖向的方形框架,导轨框架2安装在agv车外壳1前部,导轨框架2下端接近地面,导轨框架2的左右两个竖向框体上设置有导轨21,导轨框架2的中部设置有中部架22,中部架22的左右两端分别与导轨框架2的左右两个竖向框体固定连接,一升降气缸23的缸体下端固定在导轨框架2的下部,上端固定在中部架22上,升降气缸23的伸缩杆23a向上伸出,伸缩杆23a的上端固定连接动滑轮24,升降叉架3包括横向固定架31、竖向固定架32以及叉臂4,竖向固定架32的上端固定在横向固定架31上,竖向固定架32的下端与叉臂4的一端连接,叉臂4横向设置,叉臂4的另一端伸向agv车前方,用于插在垃圾桶的底部,横向固定架31的左右两侧设置有滑块31a,滑块31a卡入导轨21中,并能在导轨21中上下滑动,横向固定架31的前侧设置有至少一个到位缓冲结构33,一起重链条25的一端与中部架22固定连接,另一端向上绕过动滑轮24后,再向下与横向固定架31固定连接,升降气缸23的伸缩杆23a伸出或收回时,能使动滑轮24上下移动,从而使起重链条25带动升降叉架3升降,agv车外壳1的下部前端设置有底部臂架11,底部臂架11位于叉臂4的正下方,agv车外壳1的底部和底部臂架11的底部安装有滚轮12,驱动电机与滚轮12连接,用于驱动滚轮12滚动,导轨框架2的前端安装有激光雷达13,激光雷达13、驱动电机和升降气缸23均与电池和智能控制器连接,激光雷达13、驱动电机和升降气缸23从电池获得电能,智能控制器用于接收激光雷达13的信号并控制驱动电机和升降气缸23运作。
34.实施例中,到位缓冲结构33包括第一铰接轴33a、铰接块33b、第二铰接轴33c、滑动块33d、滑动轴33e以及牵拉弹簧33f,横向固定架31前侧面设置有横向的滑槽31c,滑槽31c上下侧壁均设置有条形孔31b,条形孔31b竖向贯穿滑槽31c,条形孔31b左右走向,铰接块33b和滑动块33d均左右走向,第一铰接轴33a固定安装在滑槽31c中,铰接块33b一端与第一铰接轴33a铰接配合,另一端通过第二铰接轴33c与滑动块33d一端铰接配合,滑动块33d另一端与滑动轴33e铰接连接,滑动轴33e位于滑槽31c中,且滑动轴33e的两端穿过对应的滑槽31c,滑动轴33e的一端与牵拉弹簧33f的一端连接,牵拉弹簧33f的另一端固定在横向固定架31上,牵拉弹簧33f具有牵拉滑动轴33e的势能,将滑动块33d拉向铰接块33b,铰接块33b和滑动块33d连接处凸出至滑槽31c外,此时,铰接块33b和滑动块33d连接处位于横向固定架31的最前端。
35.实施例中,叉臂4包括叉臂底框架41、称重模块42、叉臂上板43以及缓冲层44,叉臂底框架41包括前水平部41a和后竖直部41b,前水平部41a的后端与后竖直部41b的下端固定连接,后竖直部41b竖直向上延伸,前水平部41a水平向前延伸,称重模块42固定在前水平部41a的上表面,缓冲层44固定在称重模块42上,叉臂上板43固定在缓冲层44上,叉臂上板43的前、左和右侧向下形成上板护边43a,上板护边43a将缓冲层44和称重模块42遮挡,称重模块42通过导线与智能控制器连接,并能将称得的重量发送至智能控制器。
36.实施例中,横向固定架31的左右两端向前伸出有垃圾桶抱臂5,垃圾桶抱臂5为弹性结构制作,当叉臂4插入垃圾桶底部时,两个垃圾桶抱臂5合抱在垃圾桶中部两侧。
37.实施例中,导轨框架2的上部安装有到位传感器26,到位传感器26与智能控制器连接,升降叉架3异常冲顶时,能碰触到到位传感器26。
38.实施例中,导轨框架2顶部安装有无线信号收发器27,无线信号收发器27与智能控制器连接,无线信号收发器27用于智能控制器与远程终端信号通讯。
39.实施例中,agv车外壳1内安装有空气清新剂喷洒罐,空气清新剂喷洒罐的阀门与智能控制器连接,智能控制器能控制空气清新剂喷洒罐的阀门打开,使空气清新剂喷洒罐喷洒空气清新剂,agv车外壳1在空气清新剂喷洒罐喷洒处开设有通气孔14。
40.实施例中,前水平部41a的下表面安装有下部垫45,下部垫45用于防止叉臂4与底部臂架11硬性接触。
41.实施例中,agv车外壳1的下部边缘安装有防撞胶条15。
42.实施例中,agv车外壳1的侧面和后面均安装有超声探头16,超声探头16与智能控制器连接,超声探头16用于检测agv车侧面和后面的障碍物。
43.智能控制器选择plc。
44.本实用新型的agv车技术指标如下:
45.外形尺寸(mm): 1250(l)* 960(w)* 1825(h)
46.自重(kg):250kg
47.最大载重(kg):1000kg
48.最大速度:0.8m/s
49.回转半径:1040mm
50.行走通道宽度:1125mm
51.回转通道宽度:1600mm
52.电池容量:48v/100a
53.续航时间(h):8h
54.电池寿命(次):≥1500次
55.充电方式:手动。
56.使用方法如下:
57.agv车的电池、驱动电机、智能控制器、空气清新剂喷洒罐以及大量的导线连接线均安装在agv车外壳1中,智能控制器用于控制驱动电机、升降气缸23、空气清新剂喷洒罐运作,当装满垃圾的垃圾桶进入转运区后,智能控制器通过无线信号收发器27接收指令,移动至预定地点叉起垃圾桶,在移动过程中,激光雷达13用于导航,指引agv车前进,智能控制器通过无线信号收发器27接收自己在转运区的位置信息,超声探头16用于检测agv车侧面和后面的障碍物。agv车移动到垃圾桶前后,将底部臂架11和叉臂4一起伸入至垃圾桶下方,然后升降气缸23向上运作,动滑轮24上移,起重链条25与横向固定架31连接的一端上移,带着整个升降叉架3顺着导轨21上移,从而将垃圾桶叉起,然后在垃圾桶上升过程中,称重模块对垃圾桶进行称重,并将称得的重量信息发送至智能控制器。之后,智能控制器控制agv车转向,驶向地埋垃圾站,到地埋垃圾站的预定位置后,升降气缸23向下运作,动滑轮24下移,起重链条25与横向固定架31连接的一端下移,带着整个升降叉架3顺着导轨21下移,从而将垃圾桶放下,agv车后退,底部臂架11和叉臂4一起从垃圾桶下方退出。完成转运。
58.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1