物流设施管理系统的制作方法
物流设施管理系统
1.相关申请的交叉引用
2.本技术是2019年4月12日提交的并且名称为“logistics facility management system”的美国临时专利申请62/833,448的非临时专利申请并要求该美国临时专利申请的权益,该美国临时专利申请的公开内容全文以引用方式并入本文。
背景技术:
1.技术领域
3.示例性实施方案总体涉及商业物流设施中的物流和物料搬运,更具体地,涉及自动化移动车辆物流和物料搬运。
4.2.相关进展的简述
5.一般来讲,商业物流设施中的物品运输是通过手动操作或自动化运输装备诸如叉式起升搬运车、货盘搬运车等来进行的。运输装备在各种存放场所之间行进,其中物品承载在运输装备上,使得可将物品存放在存放场所中。在到达指定存放场所时,人类操作员将物品从运输装备卸下以将物品存放在指定存放场所中。
附图说明
6.结合附图在以下描述中解释了本发明所公开的实施方案的前述方面和其他特征,其中:
7.图1是示出根据本发明所公开的实施方案的各方面的物流管理系统的框图;
8.图2a是根据本发明所公开的实施方案的各方面的在图1的物流管理系统中利用的自动化移动车辆的透视图;
9.图2b是根据本发明所公开的实施方案的各方面的在图1的物流管理系统中利用的自动化移动车辆的透视图;
10.图2c是根据本发明所公开的实施方案的各方面的在图1的物流管理系统中利用的自动化移动车辆的透视图;
11.图2d是根据本发明所公开的实施方案的各方面的在图1的物流管理系统中利用的自动化移动车辆的透视图;
12.图3是根据本发明所公开的实施方案的各方面的图1的物流管理系统的一部分的透视图;
13.图4是根据本发明所公开的实施方案的各方面的图1的物流管理系统的一部分的示意图;
14.图5是根据本发明所公开的实施方案的各方面的图1的物流管理系统的一部分的示意图;
15.图6是根据本发明所公开的实施方案的各方面的图1的物流管理系统的一部分的示意图;
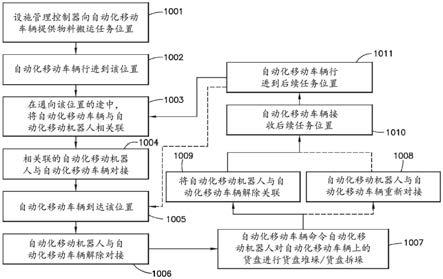
16.图7是示出根据本发明所公开的实施方案的各方面的图1的物流管理系统的流程图;
17.图8是示出根据本发明所公开的实施方案的各方面的图1的物流管理系统的流程图;
18.图9是示出根据本发明所公开的实施方案的各方面的图1的物流管理系统的流程图;并且
19.图10是根据本发明所公开的实施方案的各方面的图1的物流管理系统的设施控制器的示意图。
具体实施方式
20.具有使自动化移动车辆(amv)与可互换自动化移动机器人(amr)协作以在整个物流设施中搬运和运输物品的物流管理系统将是有利的。
21.参考图1,示出了根据本发明所公开的实施方案的各方面的物流管理系统100。尽管将参考附图描述本发明所公开的实施方案的各方面,但应当理解,本发明所公开的实施方案的各方面可以多种形式体现。此外,可使用任何合适尺寸、形状或类型的元件或物料。
22.物流管理系统100被配置用于管理商业物流设施199中的物流和/或物料搬运。商业物流设施199的示例包括但不限于仓库、商店、存放设施、配送设施、生产/装配设施等。应当理解,物流管理系统100可根据设施类型来管理物品的任何合适的运输,并且本文明确提及的任何类型的设施仅用于示例性目的。
23.物流管理系统100至少包括设施管理控制器190和至少一个自动化移动车辆101,以在商业物流设施199中执行物料搬运任务。设施管理控制器190可以是与至少一个自动化移动车辆101交接以管理商业物流设施199中的物流执行和/或物料搬运任务的任何合适的制造执行系统或仓库管理系统(参见例如图9)。在一个方面,设施管理控制器190引导商业物流设施199内的实时活动并且包括任何合适的部件诸如例如数据库/存储器191、amv模块192、人类物流模块193、通信接口194等中的一者或多者,以管理物流执行和/或物料搬运任务,如本文将进一步描述的。
24.现在参考图1、图2a至图2d和图3,自动化移动车辆101通常至少包括框架110、驱动部分111和控制器113。自动化移动车辆101还可包括与驱动部分111和控制器113两者集成以实现自动化移动车辆101的自主导航的传感器112。自动化移动车辆101被配置为横穿商业物流设施199中的行进区域198,以向/从商业物流设施199中的不同站点800运输物件或在这些不同站点之间运输物件。在一个方面,行进区域198形成商业物流设施199的物流空间;而在其他方面,行进区域198形成商业物流设施199的任何合适的空间。
25.一般来讲,自动化移动车辆101的框架110形成货物床120并且至少包括自动化移动机器人总线接口300,该自动化移动机器人总线接口从属于框架110并且被设置以接合独立自动化移动机器人350a
‑
n,如下文将进一步描述的。在一个方面,货物床120限定用于承载货盘115的货盘保持位置121(图2a);在其他方面,货物床120可包括用于保持/承载货盘化物品、物品支架、单个物品、成捆物品、物品组合体等的任何合适的结构,诸如例如具有阵列化吊架126(图2d)的床架125、或任何其他合适的货舱。在一个方面,货物床120限定用于将多于一个货盘115同时地保持在货物床120上的多于一个货盘保持位置121、122。驱动部
分111联接到框架110并且可包括被配置为驱动一个或多个车轮102或轨道并提供自动化移动车辆101的移动性的任何合适的马达。马达可直接地或通过任何合适的传动装置驱动一个或多个车轮102或轨道,使得自动化移动车辆101横穿行进区域198。自动化移动车辆101的示例是可购自heartland automation的autoguide max n10移动机器人平台,但可使用任何合适的自动化移动车辆。
26.自动化移动车辆101的控制器113能够操作地联接到驱动部分111,以与之一起实现车辆移动性。控制器113可以是配置有用于实现如本文所述的自动化移动车辆101的操作的任何合适编程的任何合适的控制系统。控制器113可被配置为诸如通过无线通信与设施管理控制器190的通信接口194通信以实现自动化移动车辆101的自主操作。例如,自动化移动车辆101可被配置为接收指示自动化移动车辆101在商业物流设施199内执行预定物料搬运任务的命令,并且设施管理控制器190可被配置为发送这些命令。此类物料搬运任务包括但不限于运输物品、存放物品、对货盘115进行货盘堆垛和/或货盘拆垛、对输送车辆700(图3)进行装载、或供自动化移动车辆101执行的任何其他合适任务。
27.在一个方面,传感器112能够操作地联接到控制器113。传感器112可以是设置在自动化移动车辆101上的任何合适位置处以实现自动化移动车辆101在整个行进区域198中的自主导航的任何合适传感器。传感器112可以是任何合适的传感器,包括但不限于光学传感器、声传感器、电容传感器、射频传感器、相机(例如,飞行时间相机、成像相机等)、和/或提供例如对商业物流设施199内的障碍物、物品、人员和/或对接站的检测的任何其他合适传感器。自动化移动车辆101被配置用于在整个行进区域198中从行进区域198中的任何起始位置自主导航到任何最终目的地位置。例如,自动化移动车辆101(经由传感器112和控制器113)可依赖于商业物流设施199的固有结构(例如,存放区域、装配机器人、输送机、装配站等)或导航基础结构(例如,线路、无线电/电磁信标、磁体、编码标记/条带等)来导航通过行进区域198。在一个方面,设施管理控制器190的amv模块192可确定自动化移动车辆在商业物流设施199内的目的地(即,控制至少一个自动化移动车辆101的移动),并且经由控制器113命令至少一个自动化移动车辆101在设施站800处执行所选择的物料搬运任务。
28.再次参考图1,如上所述,自动化移动车辆101的框架110包括用于将独立自动化移动机器人350a
‑
n接合/对接到框架110的自动化移动机器人总线接口300。应当理解,独立自动化移动机器人350a
‑
n可以是任何合适的机器人,并且可与多个不同的独立自动化移动机器人350a
‑
n互换以用于与框架110对接。独立自动化移动机器人350a
‑
n可具有任何合适的预定物料搬运特性。例如,独立自动化移动机器人350a可包括机械臂,该机械臂具有任何合适的臂端工具诸如抓持、钻孔、焊接、真空抽吸等,以用于与整个商业物流设施199中的物品或结构对接(即,自动化移动机器人350a可包括具有预定抓持物料搬运特性的机械臂,该机械臂可用于对承载在自动化移动车辆101的货物床120上的货盘115进行货盘堆垛/货盘拆垛)。
29.自动化移动机器人总线接口300可以是任何合适的联接件(例如,机械联接件、电连接件、机电联接件等中的一者或多者)以将独立自动化移动机器人350a
‑
n可释放地联接到自动化移动车辆101的框架110,使得对接到框架110的独立自动化移动机器人350a
‑
n在自动化移动车辆101的移动期间由框架110携带。在一个方面,自动化移动机器人总线接口300是与自动化移动机器人350a
‑
n自动联接和脱离(例如,在控制器113的控制下)的完全自
主联接件;然而,在其他方面,自动化移动机器人总线接口300还可被配置用于自动化移动机器人350a
‑
n的半自主或手动联接和脱离。例如,在一个方面,自动化移动车辆101可包括牵引联结件,自动化移动机器人350a
‑
n附接到该牵引联结件以由自动化移动车辆101牵引;而在其他方面,自动化移动机器人350a
‑
n可直接承载在自动化移动车辆101的框架110上。自动化移动机器人350a
‑
n可在任何合适的时间联接到自动化移动车辆101。在一个方面,自动化移动机器人总线接口300经由控制器113被配置以提供自动化移动车辆101和自动化移动机器人350a
‑
n之间的电力、数据和命令传输中的一者或多者。
30.在一个方面,商业物流设施199的设施管理控制器190被配置为基于所选择的物料搬运任务将自动化移动机器人350a
‑
n与至少一个自动化移动车辆101相关联。如上所述,自动化移动机器人350a
‑
n可与多个不同的自动化移动机器人350a
‑
n互换,使得设施管理控制器190可识别/确定最佳自动化移动机器人350a
‑
n来与自动化移动车辆101相关联以完成所选择的物料搬运任务。最佳自动化移动机器人350a
‑
n可基于自动化移动机器人350a
‑
n的预定物料搬运特性来选择。在一个方面,当确定最佳自动化移动机器人350a
‑
n时,设施管理控制器190可依赖于附加因素,诸如位置、电池寿命、机器人当前是否正在执行另一个任务以及任务可持续多长时间等。最佳自动化移动机器人350a
‑
n与自动化移动机器人总线接口300的联接将自动化移动车辆101配置为携带具有所识别的预定物料搬运特性的自动化移动机器人350a
‑
n,以执行由设施管理控制器190命令的所选择的物料搬运任务。
31.在另一方面,自动化移动车辆101的控制器113可被配置以基于自动化移动机器人350a
‑
n的预定物料搬运特性将来自不同可互换自动化移动机器人350a
‑
n的自动化移动机器人350a
‑
n与自动化移动车辆101相关联。例如,在自动化移动机器人350a
‑
n可不具有无线通信能力的情况下,自动化移动机器人总线接口300还可被配置为数据通信联接件以提供自动化移动机器人350a
‑
n和自动化移动车辆101的控制器113之间的通信,以用于将来自控制器113的命令传输到自动化移动机器人350a
‑
n。在该方面,设施管理控制器190向自动化移动车辆101的控制器113提供物料搬运任务,并且向控制器113识别用于完成物料搬运任务的预定物料搬运特性。
32.仍然参考图1,在一个方面,自动化移动机器人总线接口300和控制器113能够通信地联接,并且被配置以允许控制器113自动地(或在其他方面,手动)登记与自动化移动机器人总线接口300联接的自动化移动机器人350a
‑
n。例如,在自动化移动机器人350a
‑
n与自动化移动机器人总线接口300联接时,自动化移动机器人总线接口300向控制器113发送识别自动化移动机器人350a
‑
n的信号。在其他方面,自动化移动机器人总线接口300可包括任何合适的传感器,该传感器与自动化移动机器人350a
‑
n进行交互(接触或无接触地),以识别自动化移动机器人350a
‑
n。控制器113可将对自动化移动机器人350a
‑
n的识别登记在控制器113的任何合适的存储器中,或者可将该识别发送到设施管理控制器190。为了将预定物料搬运特性从自动化移动机器人350a
‑
n的第一预定物料搬运特性改变为另一个自动化移动机器人的不同预定物料搬运特性,自动化移动车辆101的控制器113将自动化移动机器人350a
‑
n与自动化移动车辆101解除关联。在将自动化移动机器人350a
‑
n与自动化移动车辆101解除关联之后,控制器自由地将自动化移动车辆101与具有不同预定物料搬运特性的任何其他自动化移动机器人相关联。
33.在一个方面,诸如当自动化移动机器人总线接口300包括机电联接件且自动化移
动机器人350a
‑
n对接到自动化移动车辆101(图9,框3001)时,该机电联接件能够操作地将自动化移动机器人350a
‑
n联接到电源114(图9,框3002),使得经由自动化移动机器人总线接口300的机电联接件来实现自动化移动机器人350a
‑
n充电(即,对自动化移动机器人350a
‑
n充电的电源驻留在自动化移动车辆101上)。在一个方面,控制器113可能够操作地联接到电源和机电联接件,并且被配置以在充电预留状态(图9,框3003)和充电自由状态(图9,框3004)之间选择充电状态。在充电预留状态下,机电联接件被配置为接受联接并发起对与自动化移动车辆101相关联的自动化移动机器人350a
‑
n的充电,并且拒绝与和自动化移动车辆101不相关联的另一个自动化移动机器人351的联接(图9,框3005)。在充电自由状态下,机电联接件被配置为对自动化移动机器人350a
‑
n进行充电(图9,框3006)。当自动化移动机器人350a
‑
n与自动化移动车辆101解除对接(即,与机电联接件脱离)(图9,框3007)时,处于充电自由状态的机电联接件被配置为接受和自动化移动车辆101不相关联的另一个自动化移动机器人351的联接(图9,框3008),以对不相关联的自动化移动机器人351进行充电(图9,框3009)。控制器113被配置为向每个独立自动化移动机器人350a
‑
n、351发信号通知充电状态是处于充电预留状态还是充电自由状态,并且在处于充电自由状态的情况下与不相关联的自动化移动机器人351通信以接受与不相关联的自动化移动机器人351的联接。
34.在一个方面,自动化移动车辆101被配置成使得自动化移动车辆101是操作员可导航的(例如,在整个行进区域198中由操作员驾驶和/或能够以半自主模式(即,自动化移动车辆101可在整个行进区域198中跟随人类包装员500)操作)。在该方面,设施管理控制器190包括人类物流模块193,该人类物流模块被配置为管理对商业物流设施199的人类包装员500的控制和与这些人类打包工的通信,并且识别人类包装员500的人类物料搬运任务。设施管理控制器190的人类物流模块193和amv模块192可能够通信地连接,使得向人类包装员500指示由人类物流模块193识别的人类物料搬运任务。
35.例如,自动化移动车辆101可包括操作员接口170,该操作员接口能够通信地联接(无线地或通过有线联接件)到自动化移动车辆101的控制器113。操作员接口170可以是任何合适的接口指示,包括但不限于内置于自动化移动车辆101中的图形用户接口,诸如平板电脑、智能电话和膝上型计算机。操作员接口170可被配置以通过接口指示发信号通知人类包装员500与自动化移动车辆101的关联、和/或人类物料搬运特性诸如对货物床120上的货盘115进行货盘堆垛或货盘拆垛。在一个方面,人类包装员500可与自动化移动机器人350a
‑
n一起工作,并且操作员接口170被设置成使得所指示的人类物料搬运特性与自动化移动机器人350a
‑
n的预定物料搬运特性相关。因此,基于所指示的人类物料搬运特性,人类包装员500与自动化移动机器人350a
‑
n协作以完成所选择的物料搬运任务。操作员接口170还可包括被配置用于对自主导引车辆100进行操作员控制的输入输出设备200(参见图2b)。
36.在一个方面,现在参考图1和图4至图7,商业物流设施199包括物流或物料搬运站800(例如,用于物流物品,诸如存放阵列801a
‑
n、货盘堆垛机/货盘拆垛机站802、输送机进料和/或出料站803、输送车辆对接站804等)。物流或物料搬运站800遍布于商业物流设施199的整个行进区域198。物流或物料搬运站800被设置以在物流或物料搬运站800之间形成行进通道或过道820、821,使得每个物流或物料搬运站800通过行进通道或过道820、821与一个或多个其他物流或物料搬运站800通信。物流或物料搬运站800中的每个物流或物料搬运站包括至少一个可选择可变解除对接位置850。
37.如上所述,设施管理控制器190与控制器113一起被配置为在整个商业物流设施199中的物流或物料搬运站800处实现物料搬运任务,诸如控制和命令在存放阵列801a
‑
n处对货物床120上的货盘115进行货盘码垛/货盘拆垛。为了便于货盘115的货盘堆垛和货盘拆垛,设施管理控制器190发送物料搬运指令并且控制器113接收物料搬运指令(图7;框1001)。例如,如图4所示,设施管理控制器190可命令自动化移动车辆101从第一位置701移动并行进到待执行物料搬运任务的位置,例如,存放阵列801d(图7,框1002)。在通向物料搬运任务的途中,自动化移动车辆101的控制器113与具有与所确定的物料搬运任务相关的预定物料搬运特性的所选择的自动化移动机器人350d相关联(图7,框1003)。在到达所选择的自动化移动机器人350d时,所选择的自动化移动机器人350d与自动化移动车辆101的自动化移动机器人总线接口300对接(图7,框1004)。自动化移动车辆101携带自动化移动机器人350d一起移动到与例如商业物流设施199中的存放阵列801d相关联的可选择可变解除对接位置850(图7,框1005)。在一个方面,可选择可变解除对接位置850是与存放阵列801d的位置可变偏移。在一个方面,可选择可变解除对接位置850基于自动化移动机器人350d的预定物料搬运特性来选择。
38.控制器113命令自动化移动机器人350d解除对接,使得所携带的自动化移动机器人350d在可选择可变解除对接位置850处与框架110解除对接(图7,框1006)。与自动化移动车辆101的框架110解除对接后,所解除对接的自动化移动机器人350d作为单元独立于自动化移动车辆101自主地从可选择可变解除对接位置850移动到存放阵列801d以执行所分配的物料搬运任务(图7,框1007)。例如,在一个方面,控制器113被配置为管理控制,使得所解除对接的自动化移动机器人350d在可选择可变解除对接位置850处接合承载在货物床120上的货盘115的一部分。自动化移动机器人350d可通过机械臂接合货盘115并向货盘115或从货盘115移动该部分以构造和/或拆除货盘115,从而实现对货物床120上的货盘115进行货盘堆垛和货盘拆垛。在一个方面,控制器113被配置为管理控制,使得至少部分地经由所解除对接的自动化移动机器人350d从可选择可变解除对接位置850到存放阵列801d的单元移动来实现构造和/或拆除货盘115的该部分的移动。
39.在完成所命令的任务时,自动化移动车辆101的控制器113可向设施管理控制器190发送任务完成信号以关闭任务(即,标记任务完成)。在登记所命令的物料搬运任务完成时,设施管理控制器190可实现将自动化移动车辆101重新分配给后续物料搬运任务(图7,框1010)。自动化移动机器人350d可与自动化移动车辆101重新对接以执行后续物料搬运任务(图7,框1008),或者控制器113可基于分配给自动化移动车辆101的后续物料搬运任务将自动化移动机器人350d解离(图7,框1009)并与不同的独立自动化移动机器人350a
‑
n中的另一个独立自动化移动机器人相关联。自动化移动车辆行进到该不同的独立自动化移动机器人350a
‑
n或与所解除对接的自动化移动机器人350d一起行进到后续物料搬运任务(图7,框1011)。响应于自动化移动车辆101的控制器113的命令和通信,不同的独立自动化移动机器人350a
‑
n代替所解除对接的自动化移动机器人350d选择性地对接自动化移动车辆101。
40.在另一方面,参考图1、图5和图8,设施管理控制器190可向人类包装员500发送物料搬运指令(图8;框2001)。设施管理控制器190可将人类包装员500与自动化移动车辆101相关联,以从第一位置702移动并行进到待执行物料搬运任务的位置,例如,存放阵列801d(图8,框2002)。在通向物料搬运任务的途中,自动化移动车辆101的控制器113与具有与所
确定的物料搬运任务相关的预定物料搬运特性的所选择的自动化移动机器人350a相关联(图8,框2003)。在到达所选择的自动化移动机器人350a时,所选择的自动化移动机器人350a可中断或完成所选择的自动化移动机器人350a正在执行的当前任务并与自动化移动车辆101的自动化移动机器人总线接口300对接(图8,框2004)。自动化移动车辆101和人类包装员500携带自动化移动机器人350a一起移动到例如存放阵列801d(图8,框2005)。
41.控制器113命令自动化移动机器人350a解除对接,使得所携带的自动化移动机器人350a在存放阵列801d的可选择可变解除对接位置850处与框架110解除对接(图8,框2006)。与自动化移动车辆101的框架110解除对接后,所解除对接的自动化移动机器人350a和人类包装员500从可选择可变解除对接位置850移动到存放阵列801d以执行分配的物料搬运任务(图8,框2007)。例如,在一个方面,设施管理控制器190经由人类物流模块193管理对人类包装员500的控制和与该人类包装员的通信,并且向人类包装员500识别人类物料搬运任务(该任务可经由自动化移动车辆101上的操作员接口170指示给人类包装员500)。在一个方面,所识别的人类物料搬运任务与自动化移动机器人350a的物料搬运任务协作诸如以协作地构造和/或拆除货盘115,从而实现对货物床120上的货盘115进行货盘堆垛和货盘拆垛。在完成所命令的任务时,自动化移动车辆101的控制器113可向设施管理控制器190发送任务完成信号以关闭任务(即,标记任务完成)。
42.在登记所命令的物料搬运任务完成时,设施管理控制器190可实现将人类包装员500和自动化移动车辆101重新分配给后续物料搬运任务(图8,框2010)。自动化移动机器人350a可与自动化移动车辆101重新对接以执行后续物料搬运任务(图8,框2009),或者控制器113可基于分配给自动化移动车辆101的后续物料搬运任务将自动化移动机器人350a解离(图8,框2008)并与不同的独立自动化移动机器人中的另一个独立自动化移动机器人相关联。人类包装员500和自动化移动车辆可行进到该不同的独立自动化移动机器人350a
‑
n或与所解除对接的自动化移动机器人350a一起行进到后续物料搬运任务(图8,框2011)。响应于自动化移动车辆101的控制器113的命令和通信,不同的独立自动化移动机器人350a
‑
n代替所解除对接的自动化移动机器人350a选择性地对接自动化移动车辆101。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1