具有改进的质量的玻璃管元件的制作方法
1.本发明涉及一种玻璃管元件。
背景技术:
2.玻璃管元件在许多不同的行业中广泛用作基本部件。对此的一个原因是玻 璃管元件具有以下优点:玻璃管元件可以至少部分地在随后的处理链中以多种 不同的方式方便且容易地重塑。只需几个不同的玻璃管元件作为基本部件就可 以生产出多种不同的产品。这使得能够以可控的成本和广泛可用的技术手段提 供灵活多样的产品范围。
3.特别是在药物容器领域中,玻璃管元件作为西林瓶、注射器等的基本部件 特别受人关注。此外,玻璃可以制造成使其不含诸如pb、as和cd的有毒成分 并具有高化学稳定性和高化学惰性。由于玻璃的高化学稳定性,可以消除或至少 减少玻璃管元件的玻璃壁(或壳体)的物质沉淀或泄漏,这尤其表明玻璃管元件 非常适合制药领域。
4.除了在设计选择上的高自由度外,很明显,玻璃管元件具有优良的性能, 以与药物组合物一起用作药物容器的基本部件。
5.然而,对药物容器的要求很高。并且因此对玻璃管元件的要求也很高。为 了满足各自的规格,特别要求各基本部件具有统一的设计,几何参数要控制在严 格的范围内。这样,可以确保基于玻璃管元件制造的产品(例如注射器)本身没 有意外的张紧,并且不会与其稍后应连接的其他部件(例如盖等)错配。这通常 允许产品与其他部件的安全交互,以及产品的安全处理。
6.否则,在生产过程中或使用期间可能会出现危急情况。产品(例如药物容 器)的破损可能会发生。因此,可能会损失容器中保存的药物组合物,另外,可 能会给处理该药物容器的人员带来危险。
7.因而,对药物容器的质量要求同样也适用于呈玻璃管元件形式的基本部件。 到目前为止,已经确定了各种各样的玻璃管元件几何参数,可以对玻璃管元件进 行优化以获得高质量的玻璃管元件。
8.然而,因为对质量的要求在不断提高,所以有必要进一步提高药物容器的 质量,因此也有必要提高玻璃管元件的质量。
技术实现要素:
9.因而,本发明的目的是提供质量提高的玻璃管元件,其特别适合用作为了 根据制药行业的需要进行重塑等进一步加工的基本部件。本发明的又一目的是 提供这种玻璃管元件的用途和一种用于生产这种玻璃管元件的方法。
10.根据本发明的第一方面解决了该问题,其中玻璃管元件包括:至少一个呈空心圆柱形式的区段,其中该区段具有至少一个壳体,该壳体围 成至少一个管腔;其中能够限定出在该壳体背离管腔的表面上延伸的至少一个路径;
其中该路径延伸穿过壳体的至少一个第一区域以及壳体的至少一个第二区 域,在该第一区域中应力值位于第一区间内,并且在该第二区域中应力值位于第 二区间内。
11.因此,本发明基于令人惊讶的发现玻璃管元件的质量得到了提高,因此, 如果将表面上和/或下方的应力模式设计成使得存在不同的应力区域,则玻璃管 元件特别适合于后续加工,例如至少部分重塑。已经发现,这种设计方案尤其在 不同区域对称布置时表明玻璃管元件具有特别高的质量。
12.发明人发现,为了提高第一和第二区域的分布对称性,增加了玻璃产品的 强度。令人惊讶的是,提高的对称性反过来又提高了玻璃管元件的质量。结果, 发明人发现,质量的提高伴随着几何参数(例如玻璃管元件的直度)的改进。显 而易见的是,直度的改进使得能够提高用于后续制造步骤的可用性,以及提高玻 璃管元件与其他元件组合的可用性。这是因为例如改善了可相互联接性。改善的 应力模式还允许以更可靠和安全的方式将玻璃管元件分成子元件。
13.本发明构思允许能够以令人惊讶的、可靠且廉价的方式获得高质量玻璃管 元件,从而获得基于这种玻璃管元件的高质量产品。
14.在优选实施例中,应力为机械应力。公认地,术语“(圆柱体/玻璃管元件 的)壳体”和“(圆柱体/玻璃管元件的)壁”在这里用作同义词。
15.公认地,术语“(壳体的)外表面”和“(壳体的)背离管腔的表面”在这 里用作同义词。
16.公认地,优选地,这里的每个“应力值”指的是一个差值δσ,其为轴向应 力值σ
轴向
与径向应力值σ
径向
之差。于是,轴向和径向参照玻璃管元件的中心轴 线限定。
17.实际上,由于径向应力值相对于轴向应力值通常较小,因此从实用角度来 看可以忽略不计。此外,轴向应力通常是用于评估玻璃管元件的质量(例如关于 断裂强度)的相关应力。
18.公认地,本领域技术人员知道如何测量不同表面区域的应力值。例如,测 量表面区域的应力值可以包括光学测量。在这方面,借助于与各个表面点相切的 光线(如激光束)在不同点处依次对各个表面区域进行扫描或光栅化,并测量该 光线的光学延迟。每个光学延迟又可以例如通过维尔泰姆定律(wertheim law) 转换为应力值。
19.本领域技术人员知道,可以将光学延迟值转换成相应的机械应力值。特别 是可以使用“维尔泰姆定律”来完成此任务,即其中是光学 延迟,c是应力光学常数,δσ是沿玻璃管元件中心轴线(即轴向)的应力和垂 直于玻璃管元件中心轴线(即径向)的应力之间的应力差,d是光学测量过程中 光线所穿过的样品的厚度。
20.这意味着应力光学常数限定为相应玻璃材料的材料特性。通过测量具有限 定应力参数的样品的光学延迟可以确定应力光学常数。
21.优选地,应力光学常数具有在2.2tpa
‑1和4tpa
‑1之间的值。
22.在优选实施例中,可替代地或附加地,根据题为“用于测量玻璃应力
‑
光学 系数的标准测试方法”的astm标准c770
‑
l6中描述的程序c(玻璃盘法,glassdisc method)(其内容通过引用全部并入本文)可以测量应力光学常数。
23.因此,通过在许多点处对所关注的表面区域进行扫描/光栅化并随后应用维 尔泰姆定律,就可以获得该表面区域的应力值。
24.例如,对于光学测量,光线具有线性偏振,该线性偏振与玻璃管元件的中 心轴线围成45度角。例如,光线具有630nm、633nm或635nm的光波长。例如, 环境温度为室温。
25.下面结合图1更详细地描述了光学测量,为了避免不必要的重复,可以参 考本技术的对应部分。
26.在一个实施例中,可替代地或附加地,优选的是,路径优选在该玻璃管元 件的整个长度或其区段上遵循至少一条相交线,该相交线能够通过包括该玻璃 管元件的整个中心轴线的平面与壳体背离管腔的表面的相交而获得。
27.如果路径平行于玻璃管元件的中心轴线延伸,则可以限定不同区域在纵向 上的排列,这在主要或尤其在该方向上存在应力模式变化的情况下可能特别有 用。
28.在一个实施例中,可替代地或附加地,优选的是,路径优选在所述玻璃管 元件的整个外周或其至少一个区段上遵循至少一条相交线,该相交线能够通过 垂直于玻璃管元件的中心轴线的平面与壳体背离管腔的表面的相交而获得。
29.如果路径垂直于玻璃管元件的中心轴线延伸,则可以限定不同区域在周向 上的布置,这在主要或尤其在该方向上存在应力模式变化的情况下可能特别有 用。
30.在一个实施例中,可替代地或附加地,优选的是,在沿着路径的至少一个 方向上,第二区域紧接第一区域之后。
31.如果第一区域和第二区域依次排列,则特别有可能获得均匀的光学延迟。 进一步地,这种应力模式可以以一种特别有效且廉价的方式实现。
32.在一个实施例中,可替代地或附加地,优选的是,路径延伸穿过第一数个 第一区域和第二数个第二区域,其中优选地,第一区域和第二区域在沿着路径的 至少一个方向上重复交替出现,优选为直接连续出现,并且其中优选地,该第一 数个包括与该第二数个相同数量的区域。
33.如果玻璃管元件的应力模式包括多于一个第一区域以及多于一个第二区域, 则可以实现高度规则的应力模式,并且因此可以实现光学延迟的均匀分布。这反 过来对实际玻璃管元件的质量产生积极影响。
34.如果不同类型的区域(沿着所限定路径)直接连续排列,即第一个第二区 域直接紧接在第一个第一区域之后,第二个第一区域直接紧接在第一个第二区 域之后,第二个第二区域又直接紧接在第二个第一区域之后,依此类推,可以实 现特定的规则模式。经证实这对于获得高质量玻璃管元件非常有用。
35.如果使用相同数量的第一区域和第二区域,则甚至可以进一步提高规则性。
36.在优选实施例中,第一数个第一区域的数量为2、3、5、10、15、20、25、 30或50。在优选实施例中,第二数个第二区域的数量为2、3、5、10、15、20、25、30或50。在优选实施例中,第一数个第一区域和第二数个第二区域的数量 均为2、3、5、10、15、20、25、30或50。
37.在一个实施例中,可替代地或附加地,优选的是,在沿着路径的至少一个 方向上,该路径延伸穿过壳体的至少一个第一区域以及至少一个第三区域延伸, 在该第三区域处应力值位于第三区间内,其中优选地,在沿着路径的该方向上, 第三区域(1)紧接在第一区域之后和/或(2)布置在、优选为直接布置在第一 区域与该路径下游的下一个第一或第二区域之间。
38.已经证明,包含具有至少部分与第一和第二区域的应力值不同的应力值的 第三
区域是特别有用的。令人惊讶的是,尽管第三区域破坏了第一、第二和/或 第三区域的优选规则模式,但它仍然使得质量得以提高。
39.如果将第三区域“夹在(sandwiched)”(即沿着所限定路径的相继)第一 区域和第二区域之间或在两个第一区域之间,则获得了特定的高质量玻璃管元 件。当然,优选的是,这些区域是直接相继的。
40.在一个实施例中,可替代地或附加地,优选的是,在沿着路径的至少一个 方向上,在至少一个第二区域内、优选为所有第二区域内,路径延伸穿过第二区 域的多个连续子区域,在此每个子区域的应力值位于所第二区间所包括的相应 子区间之内,其中优选地,各个子区间的取值范围至少部分不同、至少部分相同、至少部 分重叠和/或至少部分不重叠。
41.如果将第二区域划分为多个子区域,则可以在更细微的基础上控制应力模 式。这对于获得高质量玻璃管元件特别有用,事实证明,对于这些玻璃元件对应 力模式进行高深度控制是有益的。
42.在优选实施例中,至少一个或每个第二区域具有2、3、4、5或多于5个子 区域。
43.在一个实施例中,可替代地或附加地,优选的是,不同区域沿路径布置, 使得第二区域和/或第三区域中的至少一个区域设置为与至少一个第一区域、优 选为每个第一区域在直径方向上相对;和/或其中优选地,第一区间的取值范围 与第二区间的取值范围不同和/或不重叠。
44.由于在优选实施例中高值区域和低值区域可以交替设置,因此区域的区间 通常是不重叠的。
45.在一个实施例中,可替代地或附加地,优选的是,第一区间的值对应于压 缩应力,第二区间的上边界的绝对值大于第一区间的最大绝对值,和/或其中第 一区间包括在
‑
0.5mpa和
‑
10mpa之间、优选在
‑
1mpa和
‑
8mpa之间、更优选在
ꢀ‑
1mpa和
‑
5mpa之间、
‑
4mpa和
‑
6mpa之间和/或
‑
3mpa和
‑
8mpa之间的取值 范围,和/或第二区间对应于相对于第一区间的上至
‑
5mpa、优选在
‑
0.5mpa和
‑ꢀ
3mpa之间、更优选在
‑
1mpa和
‑
2.5mpa之间的偏移量。
46.在优选实施例中,第一和第二区间是连续的。这允许提供特别有用的设计 规范。
47.例如,第一区间可以包括在
‑
0.5mpa和
‑
10mpa之间的取值范围,并且第二 区间对应于相对于第一区间的上至
‑
3mpa的偏移量。优选地,这意味着,如果第 一区间在
‑
0.5mpa和
‑
10mpa之间,则第二区间在
‑
10mpa和
‑
13mpa之间。
48.在一个实施例中,可替代地或附加地,优选的是,第一区间可以包括在
‑
0.5 mpa和
‑
2mpa之间、
‑
0.5mpa和
‑
3mpa之间、
‑
0.5mpa和
‑
4mpa之间、
‑
0.5mpa 和
‑
5mpa之间、和/或
‑
0.5mpa和
‑
6mpa之间的取值范围。
49.在一个实施例中,可替代地或附加地,优选的是,第二区间可以对应于相 对于所述第一区间的上至
‑
1mpa、
‑
1.5mpa、
‑
2mpa和/或
‑
2.5mpa的偏移量。
50.在一个实施例中,可替代地或附加地,优选的是,路径位于第一区域和/或 第二区域内、特别是位于第二区域的子区域内的区段都具有相同的长度。
51.如果路径位于第一区域内的区段都具有相同的长度,则就玻璃管元件的质 量而言,可以以一种特别规则、并因此优选的方式实现应力模式。这是事实,原 因是,在这种情况下,各个第一区域沿路径的方向(例如轴向或周向)具有相同 的长度。
52.如果路径位于第二区域内的区段都具有相同的长度,则就玻璃管元件的质 量而言,可以以一种特别规则、并因此优选的方式实现应力模式。这是事实,原 因是,在这种情况下,各个第二区域沿路径的方向(例如轴向或周向)具有相同 的长度。
53.如果路径位于第一区域和第二区域内的区段分别具有相同的长度,则就玻 璃管元件的质量而言,可以以一种特别规则、并因此优选的方式实现应力模式。 这是事实,原因是,在这种情况下,所有第一区域和第二区域沿路径的方向(例 如轴向或周向)均具有相同的长度。
54.在一个实施例中,可替代地或附加地,优选的是,路径位于至少一个第二 区域的子区域内,特别是位于所有第二区域的子区域内的区段都具有针对所有 子区域特别限定的长度,子区域具有分别的子范围。
55.如果路径在具有相同取值范围的各个子区域中的长度相同,则可以提高规 则性,改善光学延迟的均匀性,从而提高玻璃管元件的质量。只考虑一个第二区 域的子区域,或者考虑甚至所有第二区域的子区域,这就进一步提高了均匀性。
56.例如,所有第二区域均具有第一子区域、第二子区域和第三子区域。第一 和第三子区域具有不同于第二子区域的取值范围的相同取值范围。在这种情况 下,优选地,路径在所有第一子区域和所有第二子区域(即所有第二区域)中具 有相同的长度。在第二子区域中,路径可以具有不同的长度。但是,不排除对于 第二子区域,限定与第一和第三子区域相同的长度。
57.在一个实施例中,可替代地或附加地,优选的是,第一区域、第二区域、优 选为子区域和/或第三区域分别包括(i)壳体背离管腔的表面的至少一个表面区 域和/或(ii)壳体的至少一个体积区域,其中优选地,从壳体背离管腔的表面沿 垂直方向朝管腔测量壳体的厚度。
58.公认地,正如其他地方更详细概述的,第一区域和第二区域可以是表面区 域(即二维区域)或体积区域(即三维区域)。在后一种情况下,优选地,在相 应的第一和/或第二区域中,各处的厚度均相同。
59.公认地,在任何情况下,第一区域和第二区域包括壳体的外表面的至少一 部分,由此包括玻璃管元件的至少一部分。这是因为体积区域的厚度是从壳体的 外表面测量的。壳体的外表面与壳体背离管腔的表面是同义词。
60.在一个实施例中,可替代地或附加地,优选的是,壳体的第一区域包括壳 体的至少一个第一表面区域。在一个实施例中,可替代地或附加地,优选的是, 壳体的第二区域包括壳体的至少一个第二表面区域。
61.在一个实施例中,可替代地或附加地,优选的是,特别是对于所限定种类 的多个平行延伸路径,能够限定第一组第一区域,其中每个第一组的第一区域借助于壳体的连接 的第一特级区域(super
‑
area)彼此相连,能够限定第二组第二区域,其中每个第二组的第二区域借助于壳体的连接 的第二特级区域彼此相连,特别地,能够限定第二区域的子区域的子组,其中每个子组的子区域借助于 壳体的连接的特级子区域彼此相连,
和/或能够限定第三组第三区域,其中每个第三组的第三区域借助于壳体的连接 的第三特级区域彼此相连,其中优选地,第一特级区域内的应力值位于第一区间内,第二特级区域内的 应力值位于第二区间内,特别地特级子区域内的应力值位于与各个子区域相对 应的子区间内,和/或第三特级区域内的应力值位于第三区间内。
62.令人惊讶的发现是,尽管从单一路径的角度来看,第一区域、第二区域和 第三区域分别只在路径的局部位置出现(并且可能在其附近)就足够了,但到目 前为止这显然既不是必需的,也不是常规的。
63.实际上,一个或多个第一特级区域、一个或多个第二特级区域和/或一个或 多个第三特级区域均可为大的区域,每个区域均覆盖壳体的大部分。事实上,可 以存在两个以上第一特级区域和/或两个以上第二特级区域和/或两个以上第三 特级区域。
64.例如,可能存在两个以上特级区域。两个以上第一特级区域在设计、应力 值等方面可以相同。但是,它们仍然可以彼此分离。这是可能的,因为对各个第 一区域以适当的方式分组为使得它们均由相应的第一特级区域相连接,该特级 区域实际存在于壳体中、特别是壳体的外表面中。优选地,在第一特级区域中, 应力值位于第一区间内,并且在第一特级区域之外,可以存在其他应力值。此准 则对于适当地分组第一区域是至关重要的。
65.换句话说,如果两个独立的第一区域不能通过公共特级区域连接,则不能 将它们分在同一组中。如果公共特级区域必须横跨应力值位于与特级区域相对 应的相应区间之外的壳体区域,则可能存在这种情况。这同样适用于第二特级区 域和第三特级区域。
66.公认地,所有平行延伸路径的限定均相同,并且针对一条路径限定的所有 方面均相应地适用于其他路径。
67.在一个实施例中,可替代地或附加地,优选的是,在展开的圆柱形壳体上, 第一特级区域、第二特级区域、特别是特级子区域和/或第三特级区域,优选为 相应的外表面(即前述背离管腔的表面)分别设计为至少部分地呈至少一个条带 的形式、优选为呈多个平行和/或不平行的条带的形式。
68.特级区域可以设计成条带形式,这可以有效地将它们设置在玻璃管元件上。
69.在一个实施例中,可替代地或附加地,优选的是,壳体的第一特级区域的 数量、第二特级区域的数量、特别是特级子区域的数量和/或第三特级区域的数 量都在1和100之间、优选为2和50之间、更优选为2和30之间、最优选为5 和20之间。
70.使用的特级区域越多,有效施加于玻璃管元件上的应力模式可以越密集。 这是事实,因为由于玻璃管元件表面的曲率,可以更方便地应用多个较小条带, 以提供应力模式的高覆盖率,而不是仅应用一个单一的宽条带。
71.在一个实施例中,可替代地或附加地,优选的是,当借助于至少一条沿测 量路径延伸的光线对玻璃管元件进行光学测量时,通过不同测量获得的光线的 光学延迟值均落于3nm和30nm之间的范围内,该测量路径沿垂直于玻璃管元 件的主延伸方向的测量方向延伸,并与壳体背离管腔的表面相切,并且测量路径 接触该表面以在不同位置处进行不同测量,每个位置在固定于玻璃管元件的圆 柱形坐标系中具有不同的方位角,并且圆柱形坐标系的原点在玻璃管元件的中 心轴线上,其中优选地,
(1)光线的波长在250nm和900nm之间、优选为390nm和800nm之间、最 优选为394nm或633nm;(2)玻璃管元件被至少一种流体包围,使得至少壳体背离管腔的表面与流体相 接触;(3)将玻璃管元件完全浸入至少一种流体中,使得至少壳体背离管腔的表面和 壳体朝向管腔的表面均与流体相接触;(4)优选地,对于光线的波长,流体的光密度与玻璃管元件的玻璃材料的光密 度相差至多1%;(5)优选地,对于光线的波长,流体的光密度在1.2和2.5之间、优选为1.3和 1.7之间、最优选为1.362、1.460、1.463、1.472、1.473、1.474、1.486、在1.492和 1.493之间、1.497、1.501、1.516、1.525或在1.43和1.61之间;(6)优选地,流体包括乙醇、橄榄油、四氯化碳、葵花籽油、松节油、甘油、 糠醇、邻苯二甲酸二丁酯84
‑
74
‑
2、甲苯、苯、邻苯二甲酸二甲酯、一氯苯或硅 油或其任何组合;(7)通过不同测量获得的光线的光学延迟值均落于10nm和150nm之间、优选 为20nm和100nm之间,和/或通过不同测量获得的所述光线的光学延迟值均 落于3nm和30nm之间、优选为4nm和25nm之间、更优选为5nm和20nm 之间;(8)从0度和359度之间的整数值(包括0和359度)中选择不同的方位角进 行360次测量;(9)沿路径布置不同区域,使得光学延迟值位于范围的该大小内;和/或(10)对圆柱形坐标系内具有相同高度和/或相同半径的位置进行测量。
72.令人惊讶的发现是,如果光学延迟统一,则可以获得不同应力区域的特定 优选布置,从而获得一种特定的稳健且优选的玻璃管元件。
73.发明人发现,如果将变化限制在一定范围内,则光学延迟是统一的。令人 惊讶的发现是,该范围的下边界大于零,且上边界为下边界的十倍左右。
74.如果将玻璃管元件完全浸入水中,则测量可以更稳定地进行。
75.如果选择适当的流体,特别是对于用于测量的波长其光密度接近玻璃管的 玻璃材料的光密度的流体,则可以获得更可靠的测量结果。
76.众所周知,优选地,如果每两个特定值之间的差值在x和y之间(且包括 x和y),则所有特定值都落入具有x与y之间的大小的范围内。换句话说, 所测量的光学延迟值的公共偏移在此不重要。
77.然而,在一个实施例中,可替代地或附加地,对于厚度为1mm的壳体并且 在光学测量期间光线所穿过的样品厚度也为1mm的情况下,所测量的光学延迟 可能具有在10nm和150nm之间的值。
78.公认地,即使测量路径与壳体背离管腔的表面相切,本领域技术人员也理 解,在实际进行光学测量时,总会包含一条或多条光线,这些光线朝玻璃管元件 的中心轴线偏移和/或沿垂直于传播方向的方向具有一定的空间扩展,即它们至 少部分在壳体内传播。例如,优选地,切向光线在外表面以下最多10μm处。
79.按照建议的方式布置这些区域,可以精确地限定光学延迟的变化。
80.由于在优选实施例中可以以交替的方式布置高值区域和低值区域,所以区 域的区间通常是不重叠的。
81.本领域技术人员知道,光学延迟的值可以转换成相应的机械应力的值。特 别是可以使用“维尔泰姆定律”来完成此任务,即其中是光 学延迟,c是应力光学常数,δσ是沿玻璃管元件中心轴线(即轴向)的应力和 垂直于玻璃管元件中心轴线(即径向)的应力之间的应力差,d是光学测量过程 中光线所穿过的样品的厚度。
82.这意味着将应力光学常数限定为相应玻璃材料的材料特性。通过测量具有 限定的应力参数的样品的光学延迟可以确定应力光学常数。
83.优选地,应力光学常数具有在2.2tpa
‑1和4tpa
‑1之间的值。
84.在一个实施例中,可替代地或附加地,优选的是,玻璃管元件具有在0.5m 和5m之间、优选在0.7m和3m之间、更优选在1m和2m之间、甚至更优选 在1.2m和1.8m之间、最优选为1.5m的长度。
85.具有在优选范围内的长度的玻璃管元件具有更高的质量。这是因为获得了 一种更稳定、更限定的玻璃管元件。
86.在一个实施例中,可替代地或附加地,优选的是,最大外径在1mm和100 mm之间、优选为3mm和60mm之间、更优选为6mm和45mm之间、8mm 和19mm之间、6mm和50mm之间或8mm和30mm之间。
87.具有在优选范围内的最大外径的玻璃管元件具有更高的质量。这是因为获 得了一种更稳定、更加限定的玻璃管元件。
88.在一个实施例中,可替代地或附加地,优选的是,壳体具有在0.1mm和5 mm之间、优选为0.2mm和3mm之间、更优选为0.3mm和2.5mm之间、最优 选为0.4mm和1.8mm之间的平均厚度。
89.具有优选壳体平均厚度的玻璃管元件特别适合应用本发明方法,因为对于 这种玻璃管元件可以获得更可靠的第一和第二比率。
90.术语“平均厚度”在此是指壳体在玻璃管元件的长度上的平均厚度。如果 壳体的厚度在任何地方都具有恒定值,则平均厚度与实际厚度相同。
91.在一个实施例中,可替代地或附加地,优选的是,玻璃管元件包括至少部 分硅酸盐玻璃,例如钠钙玻璃和/或铝硅酸盐玻璃和/或硼硅酸盐玻璃。
92.在一个实施例中,可替代地或附加地,优选的是,玻璃管元件、特别是其 玻璃材料具有高于300℃、优选为高于500℃、更优选为高于520℃、甚至更优选 为高于530℃、甚至更优选为高于550℃、最优选为高于600℃和/或低于900℃、 优选为低于800℃、更优选为低于700℃、甚至更优选为低于650℃、最优选为低 于630℃的转变温度。
93.优选地,转变温度是指用于玻璃管元件的壁的玻璃的转变温度。
94.在一个实施例中,可替代地或附加地,优选的是,玻璃管元件优选为在其 生产过程中至少暂时连接于、优选为一体连接于一个或多个其他玻璃管元件,和 /或为至少一根玻璃管线的一部分。
95.更经济的做法是制造一条更长甚至是无尽的玻璃管线,然后在这条线上按 照期望长度依次精制单个玻璃管元件。
96.在一个实施例中,可替代地或附加地,优选的是,在20℃至300℃范围内 测量的玻
璃管元件的平均线性热膨胀系数(cte)在3.0和10.0
×
10
‑6k
‑1之间、 优选在3.3和7.5
×
10
‑6k
‑1之间、更优选在4.7和6.0
×
10
‑6k
‑1之间。
97.对于玻璃管而言,具有较低的cte是有益的,这使得产品更均匀。因此, 在优选实施例中,cte限于为不超过6.9
×
10
‑6k
‑1或不超过5.9
×
10
‑6k
‑1。可以根 据din iso 7991:1987测量cte。
98.在一个实施例中,可替代地或附加地,优选的是,玻璃管元件、优选在其 生产过程中、至少在其冷却期间的至少一部分期间,以限定的运动速度沿着限定 的运动路径通过至少一个冷却设备,以设定玻璃管元件的局部改变的冷却速率。 优选地,运动路径平行于玻璃管元件的主延伸方向延伸和/或沿水平方向延伸。
99.令人惊讶地发现,如果玻璃管元件在其冷却期间经过特殊处理,则玻璃管 元件的几何参数以及由此玻璃管元件的第一、第二比率及整体质量可以得到改 善。事实证明,局部改变的玻璃管元件的冷却速率可以对冷却过程产生有利的影 响。
100.优选地,对玻璃管元件的外表面的冷却速率进行改变。然而,也可以在其 他地方,例如玻璃管元件的壳体内,对冷却速率进行改变。
101.如果确定运动速度和运动路径,则可以更好地控制冷却过程。特别地,已 经发现直的或至少接近直的运动路径更适合于均匀且可再现的相互作用。
102.发明人认为通过在冷却期间分别使用冷却设备以及其他设置进行上述处 理,控制玻璃管元件的结构,尤其是在玻璃管元件的外表面之上、之下和/或附 近的结构,从而改善玻璃管元件的几何特性。
103.在一个实施例中,可替代地或附加地,优选的是,运动速度在1cm/s和 1000cm/s之间、优选在20cm/s和800cm/s之间更优选在30cm/s和500cm/s 之间、最优选为100cm/s。
104.对于优选速度,获得了冷却设备和玻璃管元件之间的最佳相互作用时间。 因此,也可以获得更高质量的玻璃管元件。
105.在一个实施例中,可替代地或附加地,优选的是,当玻璃管元件穿过冷却 设备和/或沿着冷却设备经过时,其表面温度和少暂时在tg
‑
50℃和tg+150℃之 间。
106.发明人发现,当玻璃管元件的表面温度(特别是壳体的外表面的温度)在 玻璃管元件的材料(即玻璃)的转变温度附近的一定区间内时,冷却设备与玻璃 管元件之间可以产生特别有益的相互作用。其结果是提高了玻璃管元件的质量。
107.发明人认为,与其他温度相比,对于转变温度附近的温度范围来说,由于 冷却设备可以说是“铭刻(imprint)”了一种改变,使玻璃管元件的性能得到改 善,因此,玻璃管元件可以受到本发明构思的有利影响。
108.在优选实施例中,表面温度是外表面处的温度。
109.公认地,当玻璃管元件穿过冷却设备和/或沿着冷却设备经过时,其表面 温度和少暂时处于优选温度区间之内。换句话说,在优选实施例中,要求当玻璃 管元件穿过冷却设备和/或沿着冷却设备经过时,其表面温度和少在优选温度区 间内保持一段时间。
110.这并不排除表面温度(例如在开始通过/沿着冷却设备时)高于上限,和/ 或表面温度(例如在结束通过/沿着冷却设备时)低于下限。
111.在一个实施例中,可替代地或附加地,优选的是,冷却设备具有至少一个 接触设备,其中接触设备至少不时地和/或逐区域地接触(优选为直接接触)玻 璃管元件外表面的
至少一个区域。
112.令人惊讶的发现是,提供一种接触设备允许以精确、可靠且舒适的方式控 制玻璃管元件的表面(具体地外表面)上局部存在的冷却速率。还可以控制接触 设备接触玻璃管元件的时刻。例如,这可以借助于接触设备在冷却设备内的相应 空间布置来控制,使得玻璃管元件在较早或较晚的时刻沿相应接触设备通过。当 然,优选地,并非整个接触设备都必须与玻璃管元件接触,但也有可能。只其一 部分与玻璃管元件接触就可以足够了。当然,并非玻璃管元件的整个外表面必须 与接触设备接触,但也可以。只玻璃管元件的外表面的区域与接触设备接触就可 以足够了。
113.这些设计参数允许有效地控制接触设备与玻璃管元件之间的相互作用程 度。接触设备与玻璃管元件之间的接触越早、接触时间越长、接触范围越广,两 者之间可能发生的相互作用就越多,从而可能发生的冷却就越多。
114.在另外的优选实施例中,可替代地或附加地,冷却设备具有至少一个流体 分配器设备,该流体分配器设备设计为在玻璃管元件外表面的至少一个区域上 提供、优选至少不时地和/或逐区域地提供流体(例如水)、雾和/或空气,优选 为压缩空气。
115.使用流体可以改进对玻璃管元件冷却过程的控制。这样,尤其可以在短时 间内实现温度的剧烈变化。这也可用于辅助由接触设备执行的冷却过程。
116.优选地,流体分配器至少部分地设计为至少一个环形喷嘴的形式。这允许 流体与玻璃管元件之间实现均匀(及圆向)的相互作用。换句话说,使用环形喷 嘴可以覆盖玻璃管元件的整个外表面。事实证明,这至少分段地改善了玻璃管元 件的直度。
117.在优选实施例中,流体分配器作为至少一个空气轴承的一部分和/或与至 少一个接触设备组合使用。这使得在玻璃管元件与接触设备之间减少接触或者 甚至不直接接触的情况下获得相互作用。这样可以减少污染效应。
118.在一个实施例中,可替代地或附加地,优选的是,冷却设备具有多个接触 设备,其中优选地第一数量的多个接触设备一个接一个地适时和/或在外表面的 不同区域处与玻璃管元件的外表面相接触,和/或第二数量的多个接触设备同时 和/或在外表面的不同区域处与玻璃管元件的外表面相接触。
119.使用多于一个的接触设备可以使冷却设备和玻璃管元件之间进行更有效 地相互作用,从而进一步改善玻璃管元件的性能。
120.如果一些或所有接触设备依次(在空间上和/或在时间上)与玻璃管元件 的外表面相接触(其中接触设备不必均接触玻璃管元件外表面的相同区域,但至 少部分或全部接触设备可以接触玻璃管元件外表面的不同区域),则由于例如接 触发生在外表面的不同温度下和/或与不同的交互设备发生接触,因此可以获得 梯度相互作用。
121.如果一些或所有接触设备(例如,在空间上分布)在同一时间与玻璃管元 件的外表面接触(但例如在其不同区域处),则接触设备与玻璃管元件之间的相 互作用可以发生在很小的物理空间内,因此,可以仅减小冷却设备的尺寸。从经 济角度来看,这是有益的。
122.在一个实施例中,可替代地或附加地,优选的是,沿运动路径连续布置的 两个接触设备、优选为多个接触设备中的每两个接触设备的中心距、优选沿运动 路径测得的中心距不超过50cm、更优选为不超过40cm、甚至更优选为不超过 30cm、甚至更优选为不超过20cm、最优选为不超过10cm。
123.事实证明,有利的是,允许沿运动路径的相邻接触设备之间具有不同距离。 另外,相邻接触设备之间的距离可以变化。优选地,距离减小。这可以使得在较 高的表面温度下后续相互作用的次数增加,与表面温度较低时的相互作用相比, 这对玻璃管元件的性能影响可能更大。这也允许在较短的时间内与玻璃管元件 相互作用。
124.事实证明,相互作用的增加是有好处的,即使其会带来更高的设置成本。 所得的玻璃管元件具有改善的几何参数、尤其是改善的第一和第二比率,因而具 有改善的质量。
125.在优选实施例中,特别是与玻璃管元件的长度相比,相邻接触设备之间的 中心距很小或甚至非常小。
126.在优选实施例中,相邻接触设备之间的中心距很小或甚至非常小,此外, 玻璃管元件在通过冷却设备(特别是接触设备)的同时旋转。已经证明,如果许 多个接触设备与冷却设备内的玻璃管元件相接触,则可以改善直度。特别是,如 果玻璃管元件(或其外表面)在接触时具有tg左右的温度,则可以观察到改善 的直度。
127.在一个实施例中,可替代地或附加地,优选的是,接触设备中的至少一个 接触设备、多于一个接触设备或所有接触设备与玻璃管元件外表面的两个、三个、 四个或四个以上区域通过接触设备的相应接触区域相接触(优选为同时接触), 其中优选地,接触区域和/或与每个接触设备相接触的外表面的区域彼此分开。
128.如果接触设备被设计为使得接触设备的多个部分与玻璃管元件相互作用 (例如接触),特别是在外表面处与玻璃管元件相互作用(例如接触),则可以 获得改进的、更有效的、更全面的和更快的冷却过程控制。
129.在一个实施例中,可替代地或附加地,优选的是,至少第三数量的多个接 触设备,优选为两个、三个、四个或五个接触设备形成接触设备组。其中接触设 备组的接触设备围绕玻璃管元件布置、优选地以旋转对称的方式围绕玻璃管元 件布置。优选地,第三数量的接触设备中的至少一部分或全部接触设备在玻璃管 元件外表面的不同区域处和/或从不同空间方向同时与玻璃管元件接触。
130.通过适当的接触设备的空间布置,可以快速、可靠地完成冷却过程的操作。 这是事实,原因是,两个或甚至更多个接触设备可以同时和/或从不同空间方向 与玻璃管元件接触。事实证明,如果采用相应的布置,则对玻璃管元件的性能产 生有利的影响。
131.在一个实施例中,可替代地或附加地,优选的是,在冷却设备、特别是接 触设备,可以使玻璃管元件的表面温度在通过和/或沿着路径之后达到tg
‑
200℃ 或更低。和/或其中至少一个或所有接触设备至少在与玻璃管元件接触的区域中、 特别是在接触区域的区域中具有1w/(m
×
k)至100w/(m
×
k)、优选为10 w/(m
×
k)至70w/(m
×
k)、最优选为30w/(m
×
k)至50w/(m
×
k)的热导 率。
132.通过采用具有特定热导率的接触设备的设计,可以对冷却过程进行精确控 制,从而可以改善玻璃管元件的质量。
133.在一个实施例中,可替代地或附加地,优选的是,至少一个或所有接触设 备被设计为至少一个脚轮,其中优选地,玻璃管元件是可移动的、可支撑的、通 过脚轮沿着运动路径被移动和/或被支撑。
134.使用脚轮具有很大的设计自由度和灵活性。例如,可以轻松实现不同的尺 寸(特别是不同的直径)、不同的材料、不同的热导率和不同的接触面积。
135.例如,在脚轮的至少一个横截平面中、优选为在包括脚轮中心轴线的平面 中,脚轮至少部分地具有至少一个v形凹口。
136.该凹口允许同时实现脚轮和玻璃管元件之间的两个接触区域。换句话说, 由于在由“v”提供的空间内,玻璃管元件可以由脚轮支撑,因此,脚轮提供了 两个可能与玻璃管元件接触的侧壁。
137.还可以利用脚轮作为同时移动玻璃管元件的运输工具。这是非常经济的。
138.公认地,一个或多个脚轮也可以由相应数量的辊代替。
139.在一个实施例中,可替代地或附加地,优选的是,对至少一个接触设备、 特别是一个或多个脚轮进行温度调节、尤其是冷却。
140.这样就可以精确地控制接触设备和玻璃材料之间的温差。
141.在一个实施例中,可替代地或附加地,优选的是,每个脚轮具有至少一个 接触玻璃管元件的接触区域,该接触区域具有至少一个点,该点与脚轮中心轴线 之间的距离分别为10cm以下、5cm以下、3cm以下、1cm以下、或0.5cm以 下。
142.事实证明,有利的是,脚轮的接触区域靠近脚轮的中心轴线。这允许脚轮 的尺寸可以用一个上限值来限制,进而使得设置紧凑,并且此外,还产生了最佳 的相互作用结果。
143.在一个实施例中,可替代地或附加地,优选的是,每个脚轮具有50cm以 下、优选为30cm以下、更优选为15cm以下、甚至更优选为10cm以下、甚至 更优选为5cm以下、甚至更优选为3cm以下、最优选为1cm以下的外径。
144.事实证明,有利的是,脚轮的尺寸受到上限值的限制,从而使得设置紧凑, 此外还产生了最佳的相互作用结果。单个脚轮越小,在小空间内可使用的脚轮就 越多,并且可以一个接一个地布置更多的脚轮。这样可以获得高相互作用结果。
145.在一个实施例中,可替代地或附加地,优选的是,至少一个或所有接触设 备被设计为至少一个链条和/或至少一条输送带,其中优选地,玻璃管元件是可 移动的、可支撑的、通过链条或输送带沿着运动路径被移动和/或被支撑。
146.链条或输送带可以具有特殊的接触几何形状以控制冷却过程。
147.还可以利用链条或输送带同时作为移动玻璃管元件的运输工具。这是非常 经济的。
148.在一个实施例中,可替代地或附加地,优选的是,针对接触设备的至少一 个方面,例如数量、直径、大小、空间位置、中心距、热导率和/或设计、尤其 是脚轮设计、输送带设计或链条设计,可以将多个接触设备分为至少两组。其中 对于每个组,优选地,从上述相应的选项中分别选择各个方面的值。
149.如果使用不同类型的接触设备,则可以根据特定要求调整冷却设备与玻璃 管元件之间的相互作用。
150.例如,对于多个接触设备(例如5个接触设备),第一组接触设备a(例 如2个接触设备)具有设计a1(例如脚轮)、直径a2(例如5cm)、中心距a3 (例如6cm)、空间位置a4(例如距某个参考点0cm和6cm处测得的中心) 和热导率a5(例如30w/(m
×
k))的接触设备。第二组接触设备b(例如3 个接触设备)具有设计b1(例如脚轮)、直径b2(例如2cm)、中心距b3(例 如3cm)、空间位置b4(例如在距参考点10cm、13cm和16cm处分别测得的 中心)和热导率b5(例如40w/(m
×
k))的接触设备。
151.换句话说,对于每个组使用参数的所有可能组合能够改进制造工艺,因此 改进玻璃管元件的性能。
152.在一个实施例中,可替代地或附加地,优选的是,玻璃管元件至少在其冷 却期间旋转,优选地玻璃管元件至少在其冷却期间(1)根据运动速度旋转;(2) 以每秒1圈以上、优选为每秒5圈以上的旋转速度旋转;和/或(3)在通过冷却 设备的过程中旋转0.5次以上、优选1次以上、3次以上、5次以上或10次以上。
153.旋转玻璃管元件可以围绕玻璃管元件的整个圆周实现接触设备与玻璃管 元件之间的相互作用。特别地,旋转允许与仅一个单个接触设备进行圆周相互作 用,当然,也可以使用多于一个接触设备。这样,可以提高玻璃管元件的性能。
154.如果在玻璃管元件通过冷却设备期间进行一次或多次旋转,则可以保证确 实已经对玻璃管元件进行了至少一个完整的360度的相互作用。
155.然而,已经发现,在某些情况下,可替代地或附加地,优选的是,根本没 有进行旋转。
156.根据本发明的第二方面解决了该问题,其中提出了一种玻璃管元件,特别 是根据本发明的第一方面的玻璃管元件,其用作诸如西林瓶、药筒、安瓿瓶或注 射器的至少一个药物容器的至少一个基本部件。
157.令人惊讶地发现,由于性能改善,根据本发明构思的玻璃管元件预定用于 药物容器。
158.因此,玻璃管元件在药物容器的制造过程中可能非常有用。例如,它可以 用于西林瓶或注射器的制造过程中。
159.根据本发明的第三方面解决了该问题,其中提出了一种生产玻璃管元件, 特别是根据本发明的第一方面的玻璃管元件的方法,该方法包括以下步骤:
–
提供玻璃管线;
–
在玻璃管线的冷却期间以限定的运动速度沿着限定的优选为水平延伸的运动 路径引导玻璃管线,其中沿着运动路径的至少一个部分设置至少一个冷却设备, 在玻璃管线穿过冷却设备和/或沿着冷却设备经过时,玻璃管线的表面温度和少 暂时处于tg
‑
50℃和tg+150℃之间;
–
借助于冷却设备至少暂时和/或逐区域地作用在穿过冷却设备的或沿着冷却 设备经过的玻璃管线的至少一部分上,以设置玻璃管线的局部改变的冷却速率, 使得在玻璃管线的壳体上建立了不同区域,其中至少一个第一区域的应力值位 于第一范围内,并且至少一个第二区域的应力值位于第二范围内;以及
–
使用玻璃管线制造玻璃管元件。
160.令人惊讶地发现,如果玻璃管线在其冷却期间经过特殊处理,则玻璃管元 件的几何参数,因此其第一、第二比率及整体质量可以得到改善。事实证明,通 过局部改变玻璃管线的冷却速率影响冷却过程,会产生有利的结果。
161.优选地,对玻璃管元件的外表面的冷却速率进行改变。然而,也可以在其 他地方,例如在玻璃管元件的壳体内,对冷却速率进行改变。
162.如果限定了运动速度和运动路径,则可以获得冷却过程的更高的控制。特 别地,已经发现直的或至少接近直的运动路径更适合于统一的且可再现的相互 作用。
163.发明人认为,在冷却期间分别使用冷却设备以及其他设置进行上述处理, 控制玻璃管元件的结构,尤其是在玻璃管元件的外表面之上、之下和/或附近的 结构,从而改善玻璃管元件几何特性。
164.在一个实施例中,可替代地或附加地,优选的是,冷却设备具有至少一个 接触设备,其中接触设备至少不时地和/或逐区域地接触(优选为直接接触)玻 璃管元件外表面的至少一个区域。
165.令人惊讶的发现是,提供一种接触设备允许以精确、可靠且舒适的方式控 制玻璃管元件的表面(具体地外表面)上局部存在的冷却速率。还可以控制接触 设备接触玻璃管元件的时刻。例如,这可以借助于接触设备在冷却设备内的相应 空间布置来控制,使得玻璃管元件在较早或较晚的时刻沿相应接触设备通过。当 然,优选地,并非整个接触设备都必须与玻璃管元件接触,但这是可能的。只其 一部分与玻璃管元件接触就可以足够了。当然,并非玻璃管元件的整个外表面必 须与接触设备接触,但这是可能的。只玻璃管元件的外表面的区域与接触设备接 触就可以足够了。
166.这些设计参数允许有效地控制接触设备与玻璃管线之间的相互作用程度。 接触设备与玻璃管元件之间的接触越早、接触时间越长、接触范围越广,两者之 间可能发生的相互作用就越多,从而可能发生的冷却就越多。
167.在另外的优选实施例中,可替代地或附加地,冷却设备具有至少一个流体 分配器设备,该流体分配器设备设计为在玻璃管线外表面的至少一个区域上提 供、优选至少不时地和/或逐区域地提供流体(例如水)、雾和/或空气、优选为 压缩空气。
168.使用流体可以改进对玻璃管线冷却过程的控制。这样,尤其可以在短时间 内实现温度的剧烈变化。这也可用于支持由接触设备执行的冷却过程。
169.优选地,流体分配器至少部分地设计为至少一个环形喷嘴的形式。这允许 流体与玻璃管线之间实现均匀(及周向)的相互作用。换句话说,使用环形喷嘴 可以覆盖玻璃管线的整个外表面。事实证明,这至少分段地改善了玻璃管元件的 直度。
170.在优选实施例中,流体分配器作为至少一个空气轴承的一部分和/或与至 少一个接触设备组合使用。这使得在玻璃管元件与接触设备之间减少接触或者 甚至不直接接触的情况下获得相互作用。这样可以减少污染效应。
171.在一个实施例中,可替代地或附加地,优选的是,至少一个或所有接触设 备被设计为至少一个脚轮,其中优选地,玻璃管元件是可移动的、可支撑的、通 过脚轮沿着运动路径被移动和/或被支撑。
172.使用脚轮具有很大的设计自由度和灵活性。例如,可以轻松实现不同的尺 寸(特别是不同的直径)、不同的材料、不同的热导率和不同的接触面积。
173.例如,在脚轮的至少一个横截平面中、优选为在包括脚轮中心轴线的平面 中,脚轮至少部分地具有至少一个v形凹口。
174.该凹口允许同时实现脚轮和玻璃管元件之间的两个接触区域。换句话说, 由于在由“v”提供的空间内,玻璃管元件可以由脚轮支撑,因此,脚轮提供了 两个可能与玻璃管元件接触的侧壁。
175.还可以利用脚轮作为同时移动玻璃管元件的运输工具。这是非常经济的。
176.公认地,一个或多个脚轮也可以由相应数量的辊代替。
177.因此,本发明构思清楚地表明,通过改变接触设备、特别是脚轮的空间绝 对和相对位置、数量和/或直径,可以获得不同的相互作用模式,从而对冷却设 备与玻璃管元件之间的相互作用进行优化。发明人已经认识到,这种相互作用又 可以产生高质量的玻璃管元件。因此,出于不同的目的和要求,可以以舒适的方 式选择相应参数。这进而允许修改并提高玻璃管元件的椭圆度和直度。
178.当然,也可以通过改变玻璃管元件的运动速度来改变冷却过程,进而改变 相互作用模式,改变玻璃管元件的椭圆度和直度,从而提高玻璃管元件的质量。 同样,也可以通过改变玻璃管元件的旋转速度来改变冷却过程,进而改变相互作 用模式,改变玻璃管元件的椭圆度和直度,从而提高玻璃管元件的质量。
179.下面将详细描述本发明的其他方面。测量光学性质
180.下面将进一步详细描述根据本发明进行光学测量的原理。
181.图1示出了根据本发明的玻璃管元件1的横截平面的图示。玻璃管元件1 具有壳体3,该壳体3具有内表面5和外表面7。外表面7为壳体3背离管腔8 的表面。该平面垂直于玻璃管元件1的主延伸方向。玻璃管元件浸入流体9中。 如果流体9围绕玻璃管元件1以使得仅外表面7与流体9相接触就足够了。然 而,如图1所示,流体9也可能在空心圆柱体内部,因此它也接触内表面5。
182.优选地,流体具有与玻璃材料相同的光密度。术语“相同的光密度”在这 里是指流体的光密度和玻璃材料的光密度匹配到小数点后三位。因此,如果流体 的光密度和玻璃材料的光密度匹配到小数点后三位,则流体具有与玻璃材料相 同的光密度。
183.例如,根据该限定,1.3456和1.3454的光密度是相同的。例如,根据该限 定,1.3456和1.3457的光密度也是相同的。流体可以包括具有适当光密度的至少 一种石蜡或至少一种油或由其表示。
184.光线11a沿着测量路径延伸,该测量路径沿垂直于玻璃管元件1的主延伸 方向的测量方向延伸。该测量路径在图1所示附图平面内,并与壳体3背离管 腔的表面相切,即与外表面7相切。在图1中,测量路径在可位于圆柱形坐标系 (图1中未示出)内的位置处接触表面(即外表面7)。圆柱形坐标系固定附接 于玻璃管元件1,并且其原点借助于高度、半径和方位角位于玻璃管元件1的中 心轴线(图1中未示出)上。假设在图1中的12点钟,方位角为零度(并沿顺 时针方向增加),光线11a在具有270度方位角的位置处接触外表面7。
185.如果使用已知的光学测量设备(图1中未示出)分析通过玻璃管元件1、 特别是通过壳体3之后的光线11a,则可以确定光线11a在(尤其是)玻璃管元 件内经历的光学延迟的特定值。该光学延迟是由于玻璃管元件1中的二次折射 而产生的,而二次折射又取决于光线11a通过的壳体3的各个区域中的机械应力 状态。因此,可以认为光学延迟是用于壳体3的表面内的应力、例如壳体3的外 表面7内的应力的量度。对于不同的测量,选择测量路径与壳体3的外表面7在 同一横截平面(即、在坐标系中的相同高度)中的接触的不同位置。换句话说, 每次测量时位置的方位角均会改变。
186.因此,如果对于不同的测量,例如从0度到359度以1度的幅度改变方位 角(例如、在图1中通过绕玻璃管元件的中心轴线旋转),则可以容易且可靠地 确定光线11a对于不同方位角,也即对于测量路径接触外表面7的不同位置的光 学延迟。从这些测量中很容易获
得对于不同方位角的光学延迟值落入范围的大 小。例如,如果对于在五个不同方位角的五个测量,光学延迟值分别为40nm、 45nm、50nm、55nm和60nm,则相应的范围为40nm和60nm,并且大小的 范围为(60nm
‑
40nm)=20nm。
187.例如,对于光学测量,诸如上述光线11a之类的光线具有线性偏振,该线 性偏振与玻璃管元件的中心轴线围成45度角。例如,光线的光波长为630nm、 633nm或635nm。例如,环境温度为室温。其他玻璃性能
188.线性热膨胀系数(cte)是表征玻璃在经历一定温度变化时的膨胀行为的 量度。cte可以是如din iso 7991:1987中限定的20℃至300℃温度范围内的平 均线性热膨胀系数。cte越低,温度变化引起的膨胀越小。因此,在20℃至300℃ 的温度范围内,本发明的玻璃管元件的壁的玻璃的cte优选小于12ppm/k、更 优选小于10.0ppm/k、更优选小于9.0ppm/k、更优选小于8.0ppm/k、更优选 小于7ppm/k、更优选小于6.5ppm/k。但是,cte也不宜太低。优选地,在20℃ 至300℃的温度范围内,本发明玻璃的cte大于3ppm/k、更优选大于4ppm/k、 更优选大于5ppm/k、更优选大于6ppm/k。为了使玻璃很好地适于化学钢化, 玻璃可包含相对大量的碱金属离子、优选为钠离子。然而,由此提高了在20℃ 至300℃温度范围内的平均线性热膨胀系数cte。优选地,本发明的玻璃管元件 的壁的玻璃的cte高于7
×
10
‑6/℃、更优选为高于8
×
10
‑6/℃、更优选为高于 9
×
10
‑6/℃。然而,高cte也使通过直接热成型的玻璃生产复杂化。因此,玻璃 的cte优选低于13
×
10
‑6/℃。
189.用于玻璃管元件壁的玻璃的转变温度可以高于300℃、500℃、520℃、530℃、 550℃,或者甚至高于600℃。玻璃管元件壁的转变温度可以低于900℃、800℃、700℃、650℃、或630℃。通常,低转变温度通常包括用于熔融玻璃和加工的较 低能量成本。另外,如果转变温度低,玻璃通常将具有较低的假想温度。因此, 如果转变温度较高,则玻璃在可选化学钢化过程中将不太可能发生不可逆的热 收缩。
190.玻璃管元件应以高纯度制造,并且应具有良好的抵抗力,尤其是对碱性溶 液的抵抗力。耐碱性溶液对于玻璃管元件的使用非常重要。碱性溶液通常用作玻 璃管元件的清洁剂。优选地,玻璃管元件具有根据din iso 695:1994的a3级、 a2级或者甚至a1级耐碱性。耐碱性是指在50℃下能抵抗碱性水溶液的侵蚀。 高化学稳定性和/或高耐碱性使得例如当玻璃管元件与果汁、茶或洗碗机水等液 体接触时玻璃管元件的沉淀或泄漏的物质大大减少。物质泄漏出玻璃管元件将 改变泄漏物质的玻璃的表面的化学成分。这可能会对外观产生负面影响,因此应 该避免。
191.平均表面粗糙度(r
a
)是表面纹理的量度。它是通过实际表面与其理想形 式的垂直偏差来量化的。通常,振幅参数基于粗糙度轮廓与平均线的垂直偏差来 表征表面。r
a
是这些垂直偏差的绝对值的算术平均值。粗糙度可以用原子力显微 镜测量。玻璃管元件的内表面和/或外表面优选具有小于30nm、小于10nm、小 于5nm、小于2nm、小于1nm的平均表面粗糙度r
a
。在一些实施例中,表面 粗糙度r
a
小于0.5nm。较小的内表面和/或外表面粗糙度减少了残留流体的量。 玻璃管元件内的残留流体会引起微生物的生长,从而可能损害动物或人类的健 康。此外,当将玻璃管元件握在手中时,较小的外表面粗糙度使人感觉更舒适。 所提及的粗糙度值可以通过对玻璃进行火抛光来获得。玻璃组成
192.用于玻璃管元件壁的玻璃不限于特定的玻璃组成。玻璃可以选自由钠钙玻 璃、硼硅酸盐玻璃、耐碱性玻璃和铝硅酸盐玻璃组成的组。可选地,使用硼硅酸 盐玻璃。
193.优选地,玻璃管元件的玻璃包含指定量(以wt.%计)的以下成分: 成分含量(wt..%)sio240至85al2o30至25na2o0至18k2o0至15mgo0至10b2o30至22li2o0至10zno0至5cao0至16bao0至12zro20至5ceo20至0.5sno20至3p2o50至15fe2o30至1.5tio20至10sro0至1f0至1cl0至1
194.sio2是一种可用于本发明所使用的玻璃中的相关网络形成剂。因此,玻璃 可以包含至少60wt.%的sio2。更优选地,玻璃包含至少62wt.%、至少65wt.%、 至少68wt.%、大于70wt.%或甚至大于75wt.%的sio2。但是,玻璃中sio2的 含量也不宜太高,否则会影响可熔性。玻璃中sio2的含量可限制在至多85wt.% 或至多82wt.%。在实施例中,玻璃中sio2的含量为60wt.%至85wt.%或>65 wt.%至75wt.%。
195.b2o3可以用于经由[bo4]四面体的形式通过增加玻璃中的桥氧化物来增强 网络。它还有助于提高玻璃的抗损伤性。然而,不应在玻璃中大量使用b2o3, 因为它会降低离子交换性能。此外,加入b2o3可以显著降低杨氏模量。该玻璃 可以包含0至20wt.%、优选为0至15wt.%、优选为0.1至13wt.%的b2o3。在实 施例中,玻璃优选包含至少5wt.%、更优选为至少7wt.%、或至少10wt.%的b2o3。
[0196]
p2o5可用于本发明的玻璃中,以通过形成[po4]四面体来帮助降低熔融粘 度,在不牺牲抗结晶性的情况下可以显著降低熔点。有限量的p2o5不会显着增 加几何形状的变化,但可以显着改善玻璃的熔化、成型性能和离子交换(化学钢 化)性能。然而,如果使用大量的p2o5,则化学钢化后的几何膨胀可能会大大 增加。因此,玻璃可以包含0至4wt.%或0至2wt.%的p2o5。在一些实施例中, 玻璃不含p2o5。
[0197]
据信,当碱性氧化物比率含量等于或高于al2o3时,al2o3可以很容易地形 成四面
体配位。[alo4]四面体配位可以与[sio4]四面体一起帮助建立更紧凑的网络, 从而降低玻璃的几何形状变化。[alo4]四面体还可以显着增强化学钢化过程中的 离子交换过程。因此,玻璃中al2o3的含量优选为至少0wt.%、更优选为多于 1wt.%、更优选为多于4wt.%。然而,al2o3的含量也不应很高,否则粘度可能会 非常高,从而可能损害可熔性。因此,玻璃中al2o3的含量优选为至多20wt.%、 至多12wt.%或至多10wt.%。在优选实施例中,玻璃中al2o3的含量为0至20 wt.%、1至12wt.%、4至10wt.%。
[0198]
tio2也可以形成[tio4],因此可以帮助建立玻璃网络,并且有利于提高玻 璃的耐酸性。但是,玻璃中tio2的含量不宜太高。高浓度的tio2可作为成核剂, 从而在制造过程中导致结晶。优选地,玻璃中tio2的含量为0至10wt.%,或上 至7wt.%。在一些实施例中,玻璃包含至少0.5wt.%、至少2wt.%或至少3wt.% 的tio2。在实施例中,玻璃不含tio2。
[0199]
zro2具有降低cte并提高玻璃耐碱性的功能。它可能会增加熔融粘度, 熔融粘度可以通过使用p2o5来抑制。像碱金属一样,zr
4+
也是一种网络改良剂。 此外,zro2非常有助于提高杨氏模量。优选地,玻璃中zro2的含量为0至5wt.%、 上至2wt.%。玻璃可能不含zro2。在一些实施例中,玻璃包含至少0.1wt.%或至 少0.2wt.%的zro2。
[0200]
碱性氧化物r2o(li2o+na2o+k2o+cs2o)可以用作网络改良剂以提供足 够的氧阴离子从而形成玻璃网络。优选地,玻璃中r2o的含量为大于4wt.%或 大于12wt.%。但是,玻璃中r2o的含量不宜太高,否则可能会损害化学稳定性 和化学韧性。优选地,玻璃包含r2o的含量为至多30wt.%、至多25wt.%或至多 20wt.%。其他实施例不含碱性氧化物,或至少不含na2o、k2o、cs2o和/或li2o。
[0201]
li2o有助于提高玻璃的杨氏模量和降低cte。li2o对离子交换也有很大 的影响。令人惊讶的是,含锂玻璃具有较小的几何变化。因此,玻璃中li2o的 含量可以设定为至少0wt.%、或多于5wt.%、或甚至多于10wt.%。但是,li2o 的含量不应太高,否则会损害化学稳定性和化学韧性。优选地,玻璃中li2o的 含量不超过24wt.%、小于15wt.%或甚至为0wt.%。
[0202]
na2o可用作网络改良剂。但是,na2o的含量不应太高,否则会损害化学 稳定性和化学韧性。玻璃中na2o的含量优选为0至15wt.%、优选为2至15 wt.%。在优选实施例中,玻璃中na2o的含量为至少5wt.%、至少8wt.%或至少 10wt.%。
[0203]
k2o可用作网络改良剂。但是,k2o的含量不应太高,否则会损害化学稳 定性和化学韧性。优选地,玻璃中k2o的含量为0至15wt.%、或>0.5至7wt.%。 玻璃还可能不含k2o。
[0204]
优选地,玻璃包含比k2o多的na2o。因此,优选地,na2o/(na2o+k2o) 的摩尔比为从>0.5至1.0、从>0.6至1.0、从>0.7至1.0、或从>0.8至1.0。
[0205]
优选地,玻璃中li2o和na2o的总含量大于10mol
‑
%,或大于15mol
‑
%。 但是,玻璃中li2o和na2o的含量不宜太高。优选地,玻璃中li2o和na2o的 总含量为至多25mol
‑
%,或至多20mol
‑
%。
[0206]
玻璃还可以包含碱土金属氧化物以及zno(在本说明书中统称为“ro”)。 碱土金属和锌可用作网络改良剂。优选地,玻璃包含ro的含量为从0至20wt.%、 优选为从0至15wt.%。在一些实施例中,优选地,玻璃包含ro的含量为至少 0.5wt.%、更优选为至少1wt.%、更优选为至少5wt.%。优选的碱土金属氧化物 选自mgo、cao、sro和bao。更优选地,碱土金属选自mgo和cao。更优选 地,碱土金属为mgo。优选地,玻璃包含mgo的含量为从0至
10wt.%。在一 些实施例中,玻璃包含至少0.5wt.%、至少1wt.%或至少2wt.%的mgo。优选 地,玻璃包含cao的含量为从0至16wt.%、优选为从0至13wt.%、优选为从 0至10wt.%。在一些实施例中,玻璃包含至少0.5wt.%、至少1wt.%、至少5 wt.%、至少10wt.%或至少12wt.%的cao。优选地,玻璃包含bao的含量为从 0至12wt.%、优选为从0至10wt.%。在一些实施例中,玻璃包含至少0.5wt.%、 至少2wt.%或至少7wt.%的bao。玻璃还可以不含bao、mgo和/或cao。
[0207]
优选地,玻璃包含zno的含量为从0至5wt.%。在一些实施例中,玻璃 包含zno的含量为至少0.5wt.%、至少1wt.%或至少2wt.%。在其他实施例中, 玻璃不含zno。优选地,玻璃中mgo和zno的总含量为从0至10wt.%。在一 些实施例中,玻璃中mgo和zno的总含量为至少0.5wt.%、更优选为至少1wt.%、 更优选为至少2wt.%。
[0208]
最后,当通过混合不同类型的氧化物来形成玻璃时,应该考虑综合效果以 使玻璃的膨胀率相对较低,这由玻璃网络的高致密化支持。这意味着,除了[sio4] 四面体和[bo4]四面体之外,[alo4]四面体或[po4]四面体还有望比其他类型的多面 体更有效地连接[sio4]。换句话说,例如[bo3]三面体和[alo6]八面体不是优选的。 这意味着,优选通过添加适量的金属氧化物(例如r2o和ro)来提供足够的氧 阴离子。
[0209]
优选地,玻璃中sno2的含量为从0至3wt.%。更优选地,玻璃不含sno2。 优选地,玻璃中sb2o3的含量为从0至3wt.%。更优选地,玻璃不含sb2o3。优选 地,玻璃中ceo2的含量为从0至3wt.%。因为ceo2具有着色作用,所以高含量 的ceo2是不利的。因此,更优选地,玻璃不含ceo2。优选地,玻璃中fe2o3的 含量为从0至3wt.%。更优选地,玻璃不含fe2o3。
[0210]
本文所介绍的玻璃被描述为具有不同成分的组成。这意味着玻璃包含这些 成分,而不排除其他未提及的成分。然而,在优选实施例中,玻璃由本说明书中 所提及的成分组成,其含量至少为95%、更优选为至少97%、更优选为至少99%。 在最优选实施例中,玻璃基本上由本说明书中提及的成分组成。
[0211]
可选地,可以添加着色氧化物,例如,nd2o3、fe2o3、coo、nio、v2o5、 mno2、cuo、ceo2、cr2o3。
[0212]
0至2wt.%的as2o3、sb2o3、sno2、so3、cl和/或f也可以作为精炼剂加 入。还可以添加0至5wt.%的稀土氧化物以赋予玻璃壁光学或其他功能。
[0213]
如本文所用,术语“不含x”和“不含成分x”或“0%的x”均指玻璃基 本上不包含所述成分x,即这种成分最多可以作为杂质或污染物存在于玻璃中, 但不作为单独的成分添加到玻璃组合物中。这意味着成分x没有以必要量添加。 根据本发明的非必要量为小于100ppm、优选为小于50ppm、更优选为小于10 ppm的量。优选地,本文所介绍的玻璃基本上不包含本说明书中未提及的任何 成分。
[0214]
在实施例中,用于玻璃管元件的玻璃包含以下重量百分比的组成: 成分含量(wt..%)sio240至85al2o30至25na2o2至18k2o0至15mgo0至10
b2o30至15li2o0至10zno0至5cao0至10bao0至5zro20至5ceo20至0.5sno20至3p2o50至15fe2o30至1.5tio20至10sro0至1f0至1cl0至1
[0215]
在实施例中,用于玻璃管元件的玻璃具有以下重量百分比的组成: 成分含量(wt..%)sio255至65al2o310至20na2o0至3k2o0至3mgo0至5b2o30至6li2o0至3zno0至3cao7至15bao5至10zro20至3ceo20至0.5sno20至3p2o50至3fe2o30至1.5tio20至3sro0至1f0至1cl0至1
[0216]
在实施例中,用于玻璃管元件的玻璃具有以下重量百分比的组成: 成分含量(wt..%)sio265至85al2o30至7
na2o0.5至10k2o0至10mgo0至3b2o38至20li2o0至3zno0至3cao0至3bao0至3zro20至3ceo20至0.5sno20至3p2o50至3fe2o30至1.5tio20至3sro0至1f0至1cl0至1
[0217]
在实施例中,用于玻璃管元件的玻璃具有以下重量百分比的组成: 成分含量(wt..%)sio260至80al2o30至5na2o10至18k2o0至5mgo0至5b2o30至5li2o0至3zno0至3cao2至10bao0至5zro20至3ceo20至0.5sno20至3p2o50至3fe2o30至1.5tio20至3sro0至1f0至1cl0至1玻璃管元件的可选附加处理
[0218]
为了进行可选的化学钢化,可将玻璃浸入盐浴中。盐浴可能包含钠盐和/ 或钾盐。用于盐浴的盐可以包含na、k或cs硝酸盐、硫酸盐或氯化物盐,或其 一种或多种的混合物。优选盐为nano3、kno3、nacl、kcl、k2so4、na2so4、 na2co3、k2co3或其组合。诸如naoh、koh和其他钠盐或钾盐之类的添加剂 也可用于更好地控制化学钢化期间的离子交换速度、压缩应力和dol。在实施 例中,盐浴包含kno3、nano3、csno3或其混合物。
[0219]
化学钢化期间的温度可以在320℃至700℃、350℃至500℃或380℃至450℃ 的范围内。如果钢化温度非常低,则钢化速率将很低。因此,优选地,化学钢化 在高于320℃、更优选为高于350℃、更优选为高于380℃、更优选为至少400℃ 的温度下进行。但是,钢化温度不宜太高,因为太高的温度会导致压缩应力松弛 强烈和压缩应力低。优选地,化学钢化在小于500℃、更优选为小于450℃的温 度下进行。
[0220]
化学钢化的时间可以为从5分钟至48小时、从10分钟至20小时、从30 分钟至16小时或从60分钟至10小时的范围。在优选实施例中,化学钢化的持 续时间为0.5至16小时。化学钢化可以单步骤或多步骤进行,特别是两步骤进 行。如果钢化的持续时间很短,则得到的dol可能会很低。如果钢化时间非常 长,则cs可能会非常松弛。在多步步骤钢化程序中,每个钢化步骤的持续时间 优选为在0.05和15小时之间、更优选为在0.2和10小时之间、更优选为在0.5 和6小时之间、更优选为在1和4小时之间。化学钢化的总时间、特别是两个或 更多个单独钢化步骤的总时间优选为在0.01和20小时之间、更优选为在0.2和 20小时之间、更优选为在0.5和15小时之间、更优选为在1和10小时之间、更 优选为在1.5至8.5小时。玻璃管元件可以进行化学钢化处理,使具有至少为10 μm或至少20μm的dol。在一些实施例中,dol可以上至80μm、上至60μm 或上至50μm。
[0221]
在一些实施例中,使用kno3和nano3的混合物对玻璃进行化学钢化。 在实施例中,该混合物包含小于50mol%的nano3、小于30mol%的nano3、 小于20mol%的nano3、小于10mol%的nano3或小于5mol%的nano3。在一 些实施例中,使用kno3和csno3的混合物对玻璃进行化学钢化。在实施例中, 混合物包含小于50mol%的csno3、小于30mol%的csno3、小于20mol%的csno3、小于10mol%的csno3或小于5mol%的csno3。余量可能是kno3。
[0222]
通过使用kno3和nano3的混合物或通过用基本上纯的nano3和基本上 纯的kno3进行单独的钢化步骤来完成用kno3和nano3进行的化学钢化。同 样在用kno3和nano3的混合物对玻璃进行化学钢化的实施例中,优选地,进 行两个不同的连续钢化步骤。优选地,用于第二钢化步骤的混合物中kno3的比 例高于用于第一钢化步骤的混合物中kno3的比例。化学钢化可包括在盐浴中 用各种浓度的碱金属离子进行的多个步骤,以达到更好的钢化性能。
[0223]
可以将玻璃浸入上述盐的熔盐浴中,或用含有上述离子(如钾离子和/或 其他碱金属离子)的糊状物覆盖玻璃,并加热到高温一段时间来实现钢化。盐浴 或糊状物中离子半径较大的碱金属离子与玻璃制品中半径较小的碱金属离子进 行交换,由于离子交换而形成表面压缩应力。
[0224]
本发明的化学钢化的玻璃管元件可通过至少化学钢化本发明的玻璃管元 件的壁而获得。钢化过程可以通过将玻璃管元件、玻璃管、玻璃壁或任何中间玻 璃制品部分或完全浸入上述盐浴中或使其经受盐糊状物来完成。盐浴中的一价 离子半径大于玻璃内部的碱离子半径。离子交换后,玻璃网络中更大的离子挤压 对玻璃产生了压缩应力。经过离子交换后,玻璃的强度和柔韧性出乎意料地得到 显着提高。另外,由化学钢化引起的压缩应
力可增加玻璃管元件的耐刮擦性。因 为刮擦会影响玻璃表面的机械和化学耐性以及光学外观,所以提高耐刮擦性对 于玻璃管元件尤为重要。
[0225]
化学钢化后,将玻璃管从盐浴中取出,然后用水清洗并干燥。压缩应力层 形成在钢化玻璃管的外表面和/或内表面上。相应地,在玻璃管壁的芯部形成拉 应力。
[0226]
众所周知,优选地,任何现有的应力层或应力模式可以与随后的化学钢化 引入的应力层或应力模式重叠。特别地,通过化学钢化引入的应力层/模式的深 度可以是例如50μm,而其他应力层/模式可以在玻璃材料的整个深度上延伸。 这可能导致的情况是任何先前的应力层/模式或其部分在或至少在根据化学钢 化过程偏置某个值的某些体积/表面区域中。钢化
[0227]
在制造过程中,可以将一种或多种类型的钢化应用于玻璃管元件。例如, 可以对玻璃管元件进行化学钢化和/或物理钢化。两种类型的钢化在本技术的其 他地方都有详细说明。
[0228]
玻璃管元件壁的阈值扩散率d优选为至少1.5μm2/小时、更优选为至少4 μm2/小时。玻璃的化学钢化性能可以用阈值扩散率d来描述。阈值扩散率d可 由测得的层深(dol)和离子交换时间(iet)根据以下关系式计算:dol=~1.4 sqrt(4
×
d
×
iet)。例如,当用kno3在410℃下化学钢化玻璃8小时的时候, 可以测得阈值扩散率。用于玻璃管元件的玻璃可以具有优异的化学钢化性能,这 使得生产非常经济。因此,玻璃可以具有至少1.5μm2/小时的阈值扩散率d。优 选地,本发明玻璃的阈值扩散率d为至少4μm2/小时、至少6μm2/小时、至少 8μm2/小时、至少10μm2/小时、至少12μm2/小时、至少14μm2/小时、至少16 μm2/小时、至少18μm2/小时、至少20μm2/小时、至少25μm2/小时、至少30 μm2/小时、至少35μm2/小时、或者甚至至少40μm2/小时。在实施例中,阈值 扩散率高达60μm2/小时或50μm2/小时。
[0229]
在一些实施例中,采用化学钢化。切割机构
[0230]
在优选实施例中,三种切割机构中的至少一种可以用来制造玻璃管元件, 即用较长的玻璃元件(例如玻璃管线)制备期望长度的每个玻璃管元件:1.刮 擦,指在期望位置对较长的玻璃元件进行刮擦和折断,以获得单个玻璃管元件, 该技术也可以称为“刻痕折断”;2.锯切,指在期望位置对较长玻璃元件进行锯 切,从而获得单个玻璃管元件;3.激光切割,指单个玻璃管元件是通过激光从 较长的玻璃元件上切下单个段而获得的。
[0231]
在优选实施例中,采用激光切割技术。抛光
[0232]
在优选实施例中,玻璃管元件的所有或至少一个或多个部分都可以用火抛 光。这就是说,例如在拉制玻璃管期间或之后,材料会暴露于火焰或热中,这可 能会使表面变得光滑。优选地,至少玻璃管元件的端部是火抛光的。更优选地, 整个玻璃管元件、至少其外表面是火抛光的。也可参考上面关于表面粗糙度讨论。
附图说明
[0233]
当根据所附示意图进行阅读时,根据以下对优选实施例的详细描述,本发 明的各个方面对于本领域技术人员而言将变得显而易见,其中
图1示出了根据本发明的玻璃管元件1的横截平面的图示;
[0234]
图2a示出了根据本发明的第一玻璃管元件;
[0235]
图2b示出了根据本发明的第二玻璃管元件;
[0236]
图3示出了第一示例性生产线的示意图;
[0237]
图4示出了接触设备的示意性剖视图;
[0238]
图5示出了第二示例性生产线的示意图;
[0239]
图6示出了第三示例性生产线的示意图;
[0240]
图7示出了第四示例性生产线的示意图;
[0241]
图8示出了第五示例性生产线的示意图。
具体实施方式
[0242]
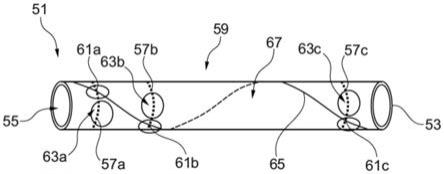
图2a示出了根据本发明的第一玻璃管元件51。
[0243]
它具有中空圆柱形的形状(不仅是其一部分,而是整个)以及围成管腔55 的壳体53。玻璃管元件51的长度(即从左到右)为1.5m。
[0244]
限定或可以限定在壳体53背离管腔55的表面59上延伸的路径57a。
[0245]
路径57a在玻璃管元件51的整个外周上遵循相交线,该相交线通过垂直 于玻璃管元件51中心轴线的平面与壳体53背离管腔55的表面59的相交获得 或可以获得。换句话说,路径57a为相交线。
[0246]
路径57a延伸穿过壳体53的至少一个第二区域61a(用圆圈表示),在该 区域应力值位于第二区间内。路径57a也延伸穿过壳体53的至少一个第一区域 63a(用另一圆圈表示),在该区域应力值位于第一区间内。
[0247]
实际上,第二区域61a和第一区域63a为壳体53的外表面59的表面区域 (二维区域)。
[0248]
可以在图2a中限定和/或标识所限定类型的多个平行延伸路径57b和57c (即对应于路径57a的平行移动变体)。对于路径57b、57c中的每一个,如同 关于路径57a所描述的,可以识别出第二区域61b、61c和第一区域63b、63c。
[0249]
可以限定单个第二组第二区域61a、61b、61c,其中第二组的第二区域61a、 61b、61c借助于壳体53的连接的第二特级区域65彼此相连。第二特级区域65 内的应力值位于第二区间内。
[0250]
可以限定单个第一组第一区域63a、63b、63c,其中第一组的第一区域63a、 63b、63c通过壳体53的连接的第一特级区域67彼此相连。第一特级区域67内 的应力值位于第一区间内。
[0251]
显然,存在一个第一特级区域和一个第二特级区域。
[0252]
在展开的圆柱形壳体53(未单独示出)上,第二特级区域设计为至少一个 条带(条带的数量实际上取决于圆柱形壳体53开始展开的位置)的形式。如果 有多个条带,则条带彼此平行。
[0253]
在展开的圆柱形壳体53上,第一特级区域设计为至少两个条带(条带的 数量取决于圆柱形壳体53开始展开的位置)的形式。这些条带彼此平行。
[0254]
公认地,实际上,在不脱离本发明范围的前提下,可以在很大程度上任意 选择表
示第一区域63a、63b、63c的圆圈区域(见图2a),只要它们至少不包括 第二区域或另一第一区域的一部分即可。对于每个第一区域的限定,关键的一点 是该区域内的应力值应在第一区间内。这不排除在第一区域之外(例如,在第一 区域63a、63b、63c之外),应力值仍在第一区间内。实际上,在第一区域之外 的一个或多个区域可能位于第一特级区域(例如第一特级区域67)内,对于这 些区域,应力值也必须位于第一区间内。
[0255]
同样的情况也适用于第二区域和第二特级区域。公认地,至少对于图2a的 情况,当然第二区域61a、61b、61c一直是并且只能是第二特级区域65的一部 分。尽管图2a中指示第二区域61a、61b、61c的圆圈可能仍然覆盖第一特级区 域67的一部分,但是,这仅是出于说明的目的,因为在图2a中,第二区域太小, 无法单独用一个圆圈表示。
[0256]
例如,在图2a中,如上所述沿着路径(例如路径57a)限定第一区域和第 二区域,在任何情况下,第一区域都不会直接跟随相应的第二区域。然而,如果 以不同的方式选择第一区域,那么至少在沿着路径(例如路径57a)的一个方向 上,第一区域可以直接跟随相应的第二区域。
[0257]
当借助于至少一条沿测量路径延伸的光线对玻璃管元件51进行光学测量 时,通过不同测量获得的光线的光学延迟值均落于3nm和30nm之间的范围内, 该测量路径沿垂直于玻璃管元件51的主延伸方向的测量方向延伸,并与壳体53 背离管腔的表面(即壳体53的外表面)相切,并且测量路径接触表面以在不同 位置处进行不同测量,每个位置在固定地附接于玻璃管元件51的圆柱形坐标系 中具有不同的方位角,并且圆柱形坐标系的原点在玻璃管元件51的中心轴线上。
[0258]
事实上,对于玻璃管元件51来说,不同位置可能在路径57a、57b或57c 中的一条(或沿着玻璃管元件51的中心轴线平行移动的每一条路径)上。
[0259]
图2b示出了根据本发明的第二玻璃管元件51'。结构上与玻璃管元件51 相似或相同的特征用相同的参考数字表示,但带有单引号(')。由于玻璃管元件 51和玻璃管元件51'之间的相似性,这里仅需要讨论其不同之处,而其余部分可 以参考上面参照图2a的讨论。
[0260]
玻璃管元件51’具有多个第二特级区域65a'、65b'、65c'、65d'、65e'、65f' (即其数量为6),并且具有多个第一特级区域67a'、67b'、67c'、67d'、67e'、67f' (即其数量为6)。
[0261]
路径57a'穿过多个第二区域(例如第二区域61a
‑
1'、61a
‑
2'和61a
‑
3')以及多 个第一区域(例如第一区域63a
‑
1'、63a
‑
2'和63a
‑
3')。然而,由于空间不足,仅 第一区域63a
‑
1'、63a
‑
2'和63a
‑
3'由圆圈表示,并且玻璃管元件51'背面上的第一和 第二区域根本没有标记。
[0262]
对平行移动路径(例如,路径57b'和57c')可以执行相同的任务。然而, 为了保持概图清楚,图2b中没有更多的参考标记。
[0263]
对于适当选择的路径(其可以包括路径57a'、57b'和57c'),可以建立第二 组第二区域,其中每个第二组的第二区域借助于壳体53'的相应连接的第二特级 区域65a'、65b'、65c'、65d'、65e'、65f'彼此相连。第二特级区域65a'至65f'内的应 力值位于第二区间内。
[0264]
对于适当选择的路径(其可以包括路径57a'、57b'和57c'),可以建立第一 组第一区域,其中每个第一组的第一区域借助于壳体53'的相应连接的第一特级 区域67a'、67b'、67c'、67d'、67e'、67f'彼此连接。第一特级区域66a'至67f'内的应 力值位于第一区间内。
[0265]
例如,因为第一区域63c
‑
1'和第一区域69'通过连接的第一特级区域67b'彼 此相
连,所以可将第一区域63c
‑
1'和第一区域69'分组在多个第一组的同一组内。 与此相反,例如,因为第一区域63c
‑
2'和第一区域69'被具有不同应力值的第二特 级区域隔开,所以它们并没有通过任何公共特级区域连接。
[0266]
显然,有6个第一特级区域和6个第二特级区域。
[0267]
在展开的圆柱形壳体53'(未单独示出)上,第二特级区域设计为(6个以 上)彼此平行的条带的形式。在展开的圆柱形壳体53'(未单独示出)上,第一 特级区域设计为(6个以上)彼此平行的条带的形式。条带的实际数量取决于圆 柱形壳体53'开始展开的位置。
[0268]
图3示出了用于生产玻璃管元件,例如玻璃管元件51或51'的第一示例性 生产线的示意图。
[0269]
由某种成形设备113形成的玻璃管线111线被重定向到水平方向。在这里 没有详细说明成形设备113,但可以将其设计为执行例如丹纳(danner)法或维 洛(vello)法。
[0270]
众所周知,玻璃管元件是玻璃管线111的一部分。或者可以说,玻璃管元 件在其生产过程中一件式地连接于另外的玻璃管元件。随后使用玻璃管线111制 造玻璃管元件例如玻璃管元件51或51'。
[0271]
因此,即使参考玻璃管线111,本领域技术人员也清楚地知道,由于玻璃 管元件对应于玻璃管线的各个区段,因此玻璃管线111所经历的每种处理也适 用于玻璃管元件。反之亦然。如果声明以某种方式处理玻璃管元件,这就与已经 使用其制造出玻璃管元件的玻璃管线以这种方式处理是一样的(除非另有说明 或从上下文中显而易见)。
[0272]
玻璃管线111从x=0的位置开始(参见图3)在平行于x轴的水平方向上 延伸,该x轴对应于所限定的运动路径。玻璃管线111具有限定的运动速度,优 选为30cm/s。玻璃管线111以及由此对应于玻璃管线111的各个区段的玻璃管 元件以限定的运动速度通过冷却设备115,以建立玻璃管线111(由此玻璃管元 件)的局部改变的冷却速率。当穿过冷却设备115时,玻璃管线111的表面温度 和少暂时处于tg
‑
50℃和tg+150℃之间。tg是指转变温度。
[0273]
冷却设备115具有多个的四个接触设备117a至117d。每个接触设备117a 至117d设计为脚轮的形式。接触设备117a至117d至少不时地与玻璃管线111 (由此相应的玻璃管元件)的外表面的至少一个区域直接接触。
[0274]
更准确地说,四个接触设备117a至117d一个接一个地适时与玻璃管元件 (即玻璃管线111的相应区段)的外表面相接触。玻璃管线111对应于玻璃管元 件(例如玻璃管元件51或51')的区段首先与接触设备117a接触,然后与接触 设备117b接触,再然后与接触设备117c接触,最后与接触设备117d接触。当 然,这并不排除多于一个的接触设备与外表面同时接触。
[0275]
通过接触设备117a至117d实现玻璃管线111的局部改变的冷却速率。所 有接触设备117a至117d至少在与玻璃管线111接触的区域中具有1w/(m
×
k) 和100w/(m
×
k)之间的热导率。实际上,热导率优选地在30w/(m
×
k)和 50w/(m
×
k)之间。这样就可以控制并改变冷却速率。
[0276]
已经证明,改变冷却速率可以改善应力模式,从而提高玻璃管元件的质量。
[0277]
接触设备117a至117d以连贯的方式位于沿着运动路径的空间位置 p1
……
p4处。以连贯的方式布置的每两个接触设备(即优选地它们是直接相邻 的)具有不超过50cm的中心距(优选为沿运动路径测量)。实际上,中心距为 50cm。在空间位置p5
……
p8处设置另外
的接触设备119a至119d。
[0278]
图4示出了接触设备、例如脚轮117a的示意性剖视图。该视图是通过垂 直于图2中x轴的切割平面获得的,以使该视图包括接触设备的中心轴线。
[0279]
脚轮117a(以及同样的脚轮117b至117d)具有v形凹口,该凹口允许沿 运动路径支撑和/或移动玻璃管线111。这种成型允许接触设备、例如脚轮117a 通过接触设备的相应接触区域同时与玻璃管线111(由此玻璃管元件)的外表面 的两个区域121a、121b相接触。接触区域和接触设备117a所接触的外表面121a、 121b区域彼此分开。
[0280]
区域121a、121b由脚轮的表面区域即接触区域生成,脚轮的表面区域具有 至少一个点,该点距脚轮117a的中心轴线的距离d/2不超过10cm。
[0281]
一旦玻璃管线111(或其与玻璃管元件相对应的区段)离开冷却设备115, 玻璃管线111就具有低于tg
‑
50℃的表面温度。当然,这并非必须,并且其表面 温度可能仍处于tg
‑
50℃和tg+150℃之间。但是,在优选设置中,温度低于tg
‑ꢀ
50℃。这是事实,因为在这种情况下,玻璃管线111与其他元件的后续接触对玻 璃管线111(由此玻璃管元件)的任何优选性能没有或没有显着或至少没有不利 影响。
[0282]
实际上,在图3的设置中,在冷却设备115之后,玻璃管线111与沿运动 路径连续设置在空间位置p5
……
p8处另外的脚轮119a至119d相接触。然而, 这些脚轮可能与冷却设备115所包括的脚轮117a至117d不同,因为它们不是冷 却设备115的一部分并且不用于控制玻璃管线111的冷却特性。
[0283]
当然,在其他优选实施例中,脚轮119a至119d可以对应于第二冷却设备 的接触设备。
[0284]
如图3中的圆形箭头所示,玻璃管线111在其冷却期间以每秒1转或更高 的旋转速度旋转。实际上,由于玻璃管线111在整个时间内一直旋转直至成型, 因此其也在冷却期间旋转。
[0285]
在一些输送设备123的下游,对玻璃管线111进行成型,以便从线中获得 期望长度的单个玻璃管元件,例如玻璃管元件51或51'。
[0286]
图5示出了用于生产玻璃管元件、例如玻璃管元件51或51'的第二示例性 生产线的示意图。与第一示例性生产线的结构特征相同或相似的第二示例性生 产线的结构特征在图5中用相同的参考数字表示,但带有单引号。
[0287]
显然,第二示例性生产线与参照图3描述的第一示例性生产线在很大程度 上相似。因此,这里仅需要讨论第一示例性生产线和第二示例性生产线之间的区 别。另外,可以参考以上关于图3的说明。
[0288]
图5的生产线包括冷却设备115',其具有5个接触设备117a'至117e'。
[0289]
接触设备117a'至117e'以连贯的方式位于沿着运动路径的空间位置 p1'
……
p5'处。以连贯的方式布置的每两个接触设备(即,优选地它们是直接相 邻的)具有不超过50cm的中心距(优选为沿着运动路径测量)。实际上,中心 距为30cm。
[0290]
这意味着,添加了一个接触设备117e'。并且相邻接触设备117a'至117e'之 间的中心距从50cm减小至30cm。
[0291]
该设置允许在冷却期间增加冷却设备115'与玻璃管线111'之间的相互作用。
[0292]
事实证明,相互作用的增加是有好处的,即使其会带来更高的设置成本。 由于特
殊设计的应力模式,由此产生的玻璃管元件具有更高的质量。
[0293]
冷却设备115'不包括位于空间位置p6'
……
p10'处的其他脚轮119a'至119e'。
[0294]
图6示出了用于生产玻璃管元件、例如玻璃管元件51或51'的第三示例性 生产线的示意图。与第一和/或第二示例性生产线的结构特征相同或相似的第三 示例性生产线的结构特征在图6中用相同的参考数字表示,但带有双引号(”)。
[0295]
显然,第三示例性生产线与参照图3和图5描述的第一和第二示例性生产 线在很大程度上相似。因此,这里仅需讨论第一、第二和第三示例性生产线之间 的区别。另外,可以参考以上关于图3和图5的说明。
[0296]
图6的生产线包括冷却设备115”,该冷却设备具有以连贯的方式位于沿着 运动路径的空间位置p1
”……
p5”处的5个接触设备117a”至117e”。
[0297]
可以根据直径和中心距将多个接触设备117a”至117e”分为两组。
[0298]
第一组包括在空间位置p1
”……
p4”处的接触设备117a”至117d”,第二组包 括在空间位置p5”处的接触设备117e”。第一组接触设备117a”至117d”的直径小 于第二组接触设备117e”的直径。较小的直径使得相邻接触设备117a”至117d”的 中心距减小至3cm。
[0299]
该设置允许在冷却期间增加冷却设备115”与玻璃管线111”之间的相互作 用。事实证明,接触设备靠得更近是有利的。因而,通过减小尺寸、特别是减小 设计为脚轮的接触设备的直径,可以在更高的温度下应用更多的接触设备。
[0300]
由于在图6的设置中使用了不同的脚轮,因此根据第一次接触时间和脚轮 直径获得了不同的相互作用。
[0301]
图7示出了用于生产玻璃管元件例如玻璃管元件51或51'的第四示例性生 产线的示意图。与第一、第二和/或第三示例性生产线的结构特征相同或相似的 第四示例性生产线的结构特征在图7中用相同的参考数字表示,但带有三引号 (”')。
[0302]
显然,第四示例性生产线与参照图3、图5和图6所述的第一、第二和第 三示例性生产线基本相似。在此,仅需讨论第一、第二、第三和第四示例性生产 线之间的区别。另外,可以参考以上关于图3、图5及图6的说明。
[0303]
图7的生产线包括冷却设备115”',该冷却设备具有以连贯的方式位于沿 着运动路径的空间位置p1”'
……
p6”'处的6个接触设备117a”'至117f”'。
[0304]
可以根据直径和中心距将多个接触设备117a”'至117f”'分为两组。
[0305]
第一组包括在空间位置p2”'
……
p4”'处的接触设备117b”'至117d”',第二组 包括在空间位置p1”'和p5”'处的接触设备117a”'和117f”'。第一组接触设备117b”' 至117d”'的直径小于第二组接触设备117a”'和117f”'的直径。较小的直径使得相邻 接触设备17b”'至117d”'的中心距减小至3cm。
[0306]
接触设备117a”'至117f”'的布置使得玻璃管线111”'首先与第二组的接触设 备117a”'接触,然后一个接一个地与第一组的接触设备117b”'至117d”'接触,最 后与第二组的接触设备117e”'接触。
[0307]
换句话说,借助于大直径的接触设备117a”',在玻璃管线111”'与冷却设备 115”'之间发生第一次相互作用。然后,通过直径较小的接触设备117b”'至117e”' 进行相互作用。最后,通过直径较大的接触设备117f”'进行相互作用。
[0308]
这种交替的相互作用导致在相应玻璃管元件的壳体上有多个不同类型的 特级区
域。更具体地说,由于不同类型的相互作用,因此,不同特级区域的应力 值位于不同的取值范围内。
[0309]
冷却设备115”'不包括在空间位置p6”'
……
p10”'处的其他脚轮119a”'至 119d”'。
[0310]
图8示出了用于生产玻璃管元件例如玻璃管元件51或51'的第五示例性生 产线的示意图。与第一、第二、第三和/或第四示例性生产线的结构特征相同或 相似的第五示例性生产线的结构特征在图8中用相同的参考数字表示,但带有 四引号(
””
)。
[0311]
第五示例性生产线特别基于参照图7所描述的第四示例性生产线。因此, 这里仅需讨论第四和第五示例性生产线之间的差异。另外,可以参考以上关于图 7的说明。
[0312]
图8的生产线包括冷却设备115
””
,该冷却设备具有以连贯的方式位于沿 着运动路径的空间位置p1
””……
p6
””
处的7个接触设备117a
””
至117f
””
。实际上, 用117a
””
表示两个均位于p1
””
处的接触设备,它们构成了一个接触设备组。该接 触设备组的接触设备117a
””
旋转对称地围绕玻璃管线111(由此围绕玻璃管元件 51或51')布置。
[0313]
换句话说,两个接触设备117a
””
之一位于玻璃管线111
””
的水平上方,另一 个位于玻璃管线111
””
的水平下方。
[0314]
这仅仅是用于增加交互元件,尤其是接触设备的数量的另一种设计选择。 这使得在空间位置p1
””
处,冷却设备115
””
与玻璃管线111
””
之间的四个接触表面 在空间需求和消耗很小的情况下相互作用,两个接触设备117a
””
中的每一个具有 两个接触区域(参见关于图4的描述)。
[0315]
对于本发明在其不同实施例中的实现而言,说明书、附图以及权利要求书 所公开的特征是必不可少的,其可以单独使用,也可以组合使用。附图标记列表:1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
玻璃管元件3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
壳体5
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
表面7
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
表面8
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
管腔9
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
水11a、11b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光线51
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
玻璃管元件53
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
壳体55
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
管腔57a、57a、57c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
路径59
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
表面61a、61b、61c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区域61a
‑
1'
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区域61a
‑
2'
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区域61a
‑
3'
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区域63a、63b、63c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区域
63a
‑
1'
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区域63a
‑
2'
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区域63a
‑
3'
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区域65
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区域65a'、65b'、65c'、65d'、65e'、65f'
ꢀꢀꢀꢀꢀꢀꢀ
区域67
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区域67a'、67b'、67c'、67d'、67e'、67f'
ꢀꢀꢀꢀꢀꢀꢀ
区域111、111'、111”、111”'、111
””ꢀꢀꢀꢀꢀꢀꢀꢀ
玻璃管线113、113'、113”、113”'、113
””ꢀꢀꢀꢀꢀꢀꢀꢀ
成型设备115、115'、115”、115”'、115
””ꢀꢀꢀꢀꢀꢀꢀꢀ
冷却设备117a、117a'、117a”、117a”'、117a
””ꢀꢀꢀ
接触设备117b、117b'、117b”、117b”'、117b
””ꢀꢀꢀ
接触设备117c、117c'、117c”、117c”'、117c
””ꢀꢀ
接触设备117d、117d'、117d”、117d”'、117d
””ꢀꢀ
接触设备117e'、117e”、117e”'、117e
””ꢀꢀꢀꢀꢀꢀꢀꢀ
接触设备117f”'、117f
””ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
接触设备119a、119a'、119a”、119a”'、119a
””ꢀꢀ
接触设备119b、119b'、119b”、119b”'、119b
””ꢀꢀ
接触设备119c、119c'、119c”、119c”'、119c
””ꢀꢀ
接触设备119d、119d'、119d”、119d”'、119d
””ꢀꢀ
接触设备119e'、119e”、119e”'、119e
””ꢀꢀꢀꢀꢀꢀꢀꢀ
接触设备121a、121b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区域123、123'、123”、123”'、123
””ꢀꢀꢀꢀꢀꢀꢀ
运输设备p1、p1'、p1”、p1”'、p1
””ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位置p2、p2'、p2”、p2”'、p2
””ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位置p3、p3'、p3”、p3”'、p3
””ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位置p4、p4'、p4”、p4”'、p4
””ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位置p5、p5'、p5”、p5”'、p5
””ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位置p6、p6'、p6”、p6”'、p6
””ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位置p7、p7'、p7”、p7”'、p7
””ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位置p8、p8'、p8”、p8”'、p8
””ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位置p9'、p9”、p9”'、p9
””ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位置p10'、p10”、p10”'、p10
””ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位置p11”'、p11
””ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位置d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
距离x、x'、x”、x”'、x
””ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
轴
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1