新型高速旋转式物料取放装置的制作方法
1.本发明涉及光学产品加工技术领域,尤其涉及一种新型高速旋转式物料取放装置。
背景技术:
2.在石英晶体的加工过程中,通常需要对石英晶体进行测试工序和打标工序,但是由于产品测试工序和打标工序通常需要作业于石英晶体的不同表面,而传统的物料取放装置只能在二者之间转移石英晶体而无法对石英晶体实现翻面处理,因而只能通过人工手动调整方式对石英晶体进行翻面以适应于下一工序作业。虽然人工手动调整可以实现不同工序之间的配合,但是却无法保证石英晶体的加工效率。
技术实现要素:
3.鉴于背景技术中存在的问题,本发明的目的在于提供一种新型高速旋转式物料取放装置,其不仅能够实现不同工序之间的物料转移,还能实现对物料的翻面处理,从而使得物料能够同时适应于不同工序的作业要求,由此极大地提高了产品的加工效率。
4.为了实现上述目的,本发明提供了一种新型高速旋转式物料取放装置,其包括转送机构、取放机构和翻转机构。所述转送机构用于放置物料并带动物料旋转,以向所述取放机构连续供料。所述取放机构用于在所述转送机构与所述翻转机构之间转移物料。所述翻转机构用于接收所述取放机构从所述转送机构上抓取的物料并对该物料进行180
°
翻转,且在该物料被翻转后,所述取放机构将该物料从所述翻转机构上转移至所述转送机构上。
5.在根据一些实施例的新型高速旋转式物料取放装置中,所述转送机构包括工作台、转轴、旋转电机和定位座。所述定位座设置于所述工作台,所述工作台连接于所述转轴,所述转轴连接于所述旋转电机。
6.在根据一些实施例的新型高速旋转式物料取放装置中,所述取放机构包括机械手、第一调节组件和第二调节组件。所述机械手在上下方向上位于所述转送机构上方,所述第一调节组件连接于所述机械手并带动所述机械手在所述上下方向上运动,所述第二调节组件连接于所述第一调节组件并带动所述机械手在前后方向上运动。
7.在根据一些实施例的新型高速旋转式物料取放装置中,所述取放机构还包括弹性保护机构,所述弹性保护机构连接于所述机械手和所述第一调节组件、并用于对所述机械手进行断电保护。
8.在根据一些实施例的新型高速旋转式物料取放装置中,所述第一调节组件包括凸轮、第一电机和第一导向机构。所述凸轮连接于所述机械手和所述第一电机,所述第一导向机构连接于所述机械手。在所述第一电机的作用下,所述凸轮旋转运动、所述机械手在所述上下方向上沿着所述第一导向机构运动。
9.在根据一些实施例的新型高速旋转式物料取放装置中,所述第二调节组件包括第二滑块、第二电机和第二导向板。所述第二滑块滑动连接于所述第二导向板,所述第二电机
连接于所述第二滑块,所述第一调节组件连接于所述第二滑块。在所述第二电机的作用下,所述第二滑块带动所述机械手在所述前后方向上运动。
10.在根据一些实施例的新型高速旋转式物料取放装置中,所述翻转机构包括定位组件、第一伸缩组件、第二伸缩组件和驱动机构。所述定位组件用于限定物料的位置,所述第一伸缩组件和所述第二伸缩组件分别位于所述定位组件两侧、并滑动连接于所述定位组件,所述驱动机构连接于所述定位组件、所述第一伸缩组件和所述第二伸缩组件。在所述驱动机构的作用下,所述定位组件、所述第一伸缩组件和所述第二伸缩组件一起旋转运动、同时所述第一伸缩组件和所述第二伸缩组件在所述前后方向上相互错位运动。
11.在根据一些实施例的新型高速旋转式物料取放装置中,所述定位组件包括定位板和连接板。所述定位板设置有开口,所述连接板连接于所述驱动机构和所述定位板。在物料被翻转前,物料收容于所述开口中并支撑在所述第一伸缩组件上。在物料被翻转180
°
后,物料收容于所述开口中并支撑在所述第二伸缩组件上。
12.在根据一些实施例的新型高速旋转式物料取放装置中,所述第一伸缩组件包括第一连接座、第一支撑板和第一伸缩板。所述第一支撑板连接于所述第一连接座,所述第一伸缩板连接于所述第一连接座和所述驱动机构。在所述驱动机构的作用下,所述第一伸缩板带动所述第一连接座和所述第一支撑板旋转运动、同时带动所述第一连接座和所述第一支撑板在所述前后方向上伸缩运动。
13.在根据一些实施例的新型高速旋转式物料取放装置中,所述驱动机构包括驱动电机和凸轮轴,所述驱动电机连接于所述凸轮轴。在所述驱动电机的作用下,所述凸轮轴带动所述定位组件、所述第一伸缩组件和所述第二伸缩组件旋转运动、同时带动所述第一伸缩组件和所述第二伸缩组件在所述前后方向上相互错位运动。
14.本发明的有益效果如下:
15.本申请的新型高速旋转式物料取放装置中,基于转送机构、取放机构和翻转机构之间的协同配合作用,在物料被转移至下一工序前实现了对物料的翻面处理,进而使得该物料符合下一工序作业要求;同时基于转送机构的转动作用,使得未被翻面处理的物料依次被取放机构转移至翻转机构上以进行翻面处理、同时已被翻面处理的物料被转移至下一工序以进行对应的工艺加工,进而实现对物料的连续作业。而由于本申请的新型高速旋转式物料取放装置的整个工作过程为全自动化作业,从而极大地提高了产品的加工效率。此外,本申请的新型高速旋转式物料取放装置尤其适用于需要对物料进行翻面处理的加工工艺过程中。
附图说明
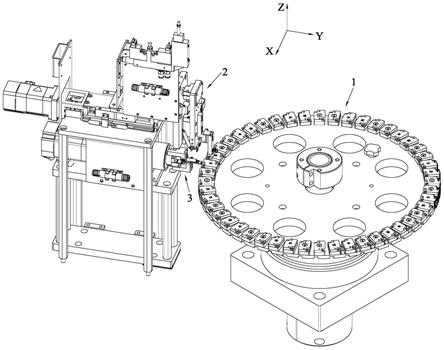
16.图1是本发明的新型高速旋转式物料取放装置的立体图。
17.图2是图1中的转送机构的立体图。
18.图3是图1中的取放机构的立体图。
19.图4是图1中的翻转机构的立体图。
20.图5是图4中的圆圈部分的放大图。
21.其中,附图标记说明如下:
22.1转送机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31定位组件
23.11工作台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
311定位板
24.12转轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3111开口
25.13旋转电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
312连接板
26.14定位座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32第一伸缩组件
27.2取放机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
321第一连接座
28.21机械手
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
322第一支撑板
29.211机械臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
323第一伸缩板
30.212安装板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33第二伸缩组件
31.213吸盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
331第二连接座
32.22第一调节组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
332第二支撑板
33.221凸轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
333第二伸缩板
34.222第一电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
34驱动机构
35.223第一导向机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
341驱动电机
36.2231第一滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
342凸轮轴
37.2232第一导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3421第一连接部
38.23第二调节组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3422第二连接部
39.231第二滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3423导向槽
40.232第二电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
b物料
41.233第二导向板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
x前后方向
42.24弹性保护机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
y左右方向
43.3翻转机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
z上下方向
具体实施方式
44.为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
45.除非另有定义,本文所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同;本文中在申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本申请;本申请的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含。本申请的说明书和权利要求书或上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序或主次关系。本申请中出现的“多个”指的是两个以上(包括两个)。
46.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本申请的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
47.下面参照附图来详细说明根据本申请的新型高速旋转式物料取放装置。
48.参照图1至图5,本申请的新型高速旋转式物料取放装置包括转送机构1、取放机构
2和翻转机构3。
49.转送机构1用于放置物料b(如石英晶体)并带动物料b旋转运动以向取放机构2连续供料。其中,物料b沿转送机构1的周向间隔排列成一圈、同时基于转送机构1的转动作用,各物料b还能够在不同工序之间转移,进而使得各物料b能够连续进行不同的工艺加工。
50.取放机构2用于在转送机构1与翻转机构3之间转移物料b。话句话说,取放机构2既能将转送机构1上的物料b转移至翻转机构3上,也能将翻转机构3上的物料b转移至转送机构1上。
51.翻转机构3位于转送机构1一侧、用于接收取放机构2从转送机构1上抓取的物料b并对该物料b进行180
°
翻转,当该物料b被翻转后,取放机构2再将该物料b从翻转机构3上转移至转送机构1上。
52.在本申请的新型高速旋转式物料取放装置中,基于转送机构1、取放机构2和翻转机构3之间的协同配合作用,在物料b被转移至下一工序前实现了对物料b的翻面处理,进而使得该物料b符合下一工序作业要求;同时基于转送机构1的转动作用,使得未被翻面处理的物料b依次被取放机构2转移至翻转机构3上以进行翻面处理、同时已被翻面处理的物料b被转移至下一工序以进行对应的工艺加工,进而实现对物料b的连续作业。而由于本申请的新型高速旋转式物料取放装置的整个工作过程为全自动化作业,从而极大地提高了产品的加工效率。此外,本申请的新型高速旋转式物料取放装置尤其适用于需要对物料进行翻面处理的加工工艺过程中。
53.在一些实施例中,本申请的新型高速旋转式物料取放装置可以用于光学产品的加工工艺过程中,具体地可以在产品测试工序与打标工序之间转移物料。
54.在一些实施例中,参照图1和图2,转送机构1包括工作台11、转轴12、旋转电机13和定位座14。定位座14在数量上为多个,所述多个定位座14间隔设置于工作台11,且各定位座14用于限位安装对应一个物料b。工作台11连接于转轴12,转轴12连接于旋转电机13。在旋转电机13的驱动作用下,转轴12带动工作台11旋转运动以向取放机构2连续供料、同时带动对应的物料b进入下一工序。
55.在一些实施例中,参照图1和图3,取放机构2包括机械手21、第一调节组件22和第二调节组件23。机械手21在上下方向z上位于转送机构1上方,第一调节组件22连接于机械手21并带动机械手21在所述上下方向z上运动。第二调节组件23连接于第一调节组件22并带动机械手21在前后方向x(即机械手21对应下方的物料b所在的径向方向,而同时垂直于所述前后方向x和所述上下方向z的方向为左右方向y,如附图所示)上运动。基于机械手21、第一调节组件22和第二调节组件23之间的协同配合作用,实现了机械手21在转送机构1与翻转机构3之间往复转移物料b。
56.在一些实施例中,参照图3,机械手21包括机械臂211、安装板212和吸盘213。机械臂211固定安装于安装板212,安装板212固定连接于第一调节组件22,吸盘213设置于机械臂211末端以抓取和释放物料b。
57.在一些实施例中,参照图3,第一调节组件22包括凸轮221、第一电机222和第一导向机构223。凸轮221连接于机械手21和第一电机222,第一导向机构223连接于机械手21。在第一电机222的作用下,凸轮221旋转运动、机械手21在所述上下方向z上沿着第一导向机构223作直线运动。
58.这里,基于凸轮221自身的结构特性,第一电机222的旋转运动被转化为机械手21的直线运动;同时基于第一导向机构223的导向作用,保证了第一调节组件22在所述上下方向z上对机械手21的位置调节精度。
59.在一些实施例中,进一步参照图3,第一导向机构223包括第一滑块2231和第一导轨2232。第一导轨2232在所述上下方向z上延伸,第一滑块2231滑动连接于第一导轨2232,机械手21固定连接于第一滑块2231。在第一电机222的作用下,凸轮221旋转运动、而机械手21和第一滑块2231一起沿着第一导轨2232运动。
60.在一些实施例中,参照图3,第二调节组件23包括第二滑块231、第二电机232和第二导向板233。第二导向板233在所述前后方向x上延伸,第二滑块231滑动连接于第二导向板233,第二电机232连接于第二滑块231。第一调节组件22连接于第二滑块231。在第二电机232的作用下,第二滑块231带动第一调节组件22和机械手21在所述前后方向x上运动。
61.在一些实施例中,参照图3,取放机构2还包括弹性保护机构24。弹性保护机构24连接于机械手21和第一调节组件22、并用于对机械手21进行断电保护。即当设备突然发生断电时,第一调节组件22和第二调节组件23停止运动,此时机械手21易因惯性和重力而向下运动,而基于弹性保护机构24自身的弹性,弹性保护机构24能够及时拉住机械手21以防止其进一步下跌,从而对机械手21进行保护。
62.在一些实施例中,弹性保护机构24为弹簧。
63.在一些实施例中,参照图1、图4和图5,翻转机构3包括定位组件31、第一伸缩组件32、第二伸缩组件33和驱动机构34。
64.定位组件31用于限定翻转机构3接收到的物料b的位置,即取放机构2将从转送机构1上抓取的物料b放置于定位组件31上。第一伸缩组件32和第二伸缩组件33分别位于定位组件31两侧、并滑动连接于定位组件31。驱动机构34连接于定位组件31、第一伸缩组件32和第二伸缩组件33。
65.在驱动机构34的作用下,定位组件31、第一伸缩组件32和第二伸缩组件33一起旋转运动、同时第一伸缩组件32和第二伸缩组件33在所述前后方向x上相互错位运动(即在翻转过程中,第一伸缩组件32和第二伸缩组件33在所述前后方向x上的运动方向相反)以对物料b进行翻转。其中,在物料b被翻转前,物料b位于定位组件31中并支撑在第一伸缩组件32上,此时第二伸缩组件33在所述上下方向z上位于第一伸缩组件32上方且第二伸缩组件33在所述前后方向x上位于物料b一侧;而在物料b被翻转180
°
后,物料b位于定位组件31中并支撑在第二伸缩组件33上,此时第一伸缩组件32在所述上下方向z上位于第二伸缩组件33上方且第一伸缩组件32在所述前后方向x上位于物料b一侧。
66.在一些实施例中,参照图4和图5,定位组件31包括定位板311和连接板312。定位板311设置有开口3111,连接板312连接于驱动机构34和定位板311。在物料b被翻转前,物料b收容于开口3111中并支撑在第一伸缩组件32上;在物料b被翻转180
°
后,物料b收容于开口3111中并支撑在第二伸缩组件33上。这里,开口3111的设置,不仅用于放置物料b,且当物料b在开口3111中倾斜放置时,则在翻转机构3的旋转过程中,物料b会直接被第一伸缩组件32或第二伸缩组件33推落,从而防止了翻转机构3夹伤物料b。
67.在一些实施例中,参照图4和图5,第一伸缩组件32包括第一连接座321、第一支撑板322和第一伸缩板323。第一支撑板322连接于第一连接座321,第一伸缩板323连接于第一
连接座321和驱动机构34。在驱动机构34的作用下,第一伸缩板323带动第一连接座321和第一支撑板322旋转运动、同时带动第一连接座321和第一支撑板322在所述前后方向x上相对定位组件31进行伸缩运动。
68.在一些实施例中,参照图4和图5,第二伸缩组件33包括第二连接座331、第二支撑板332和第二伸缩板333。第二支撑板332连接于第二连接座331,第二伸缩板333连接于第二连接座331和驱动机构34。在驱动机构34的作用下,第二伸缩板333带动第二连接座331和第二支撑板332旋转运动、同时带动第二连接座331和第二支撑板332在所述前后方向x上相对定位组件31进行伸缩运动。
69.在一些实施例中,参照图4和图5,第一支撑板322和第二支撑板332设置有与开口3111连通的通孔a,通孔a面向物料b并连接于外部抽真空装置。在翻转机构3的旋转过程中,外部抽真空装置基于通孔a真空吸附物料b,从而给物料b一个向内的作用力,由此使得物料b被始终定位在开口3111中。
70.在一些实施例中,参照图4和图5,驱动机构34包括驱动电机341和凸轮轴342,驱动电机341连接于凸轮轴342。在驱动电机341的作用下,凸轮轴342带动定位组件31、第一伸缩组件32和第二伸缩组件33旋转运动、同时带动第一伸缩组件32和第二伸缩组件33在所述前后方向x上相互错位运动。
71.在一些实施例中,进一步参照图4和图5,凸轮轴342具有第一连接部3421和第二连接部3422。第一连接部3421位于第二连接部3422与定位组件31之间并连接于第二连接部3422和定位组件31。第二连接部3422连接于第一伸缩组件32和第二伸缩组件33。
72.在驱动电机341的作用下,凸轮轴342的第一连接部3421带动定位组件31旋转运动。凸轮轴342的第二连接部3422带动第一伸缩组件32和第二伸缩组件33旋转运动、同时带动第一伸缩组件32和第二伸缩组件33在所述前后方向x上相互错位运动。
73.在一些实施例中,进一步参照图4和图5,凸轮轴342还具有导向槽3423,导向槽3423形成于第二连接部3422中。导向槽3423在数量上为两个,所述两个导向槽3423相对设置。在驱动电机341的作用下,第二连接部3422带动第一伸缩组件32和第二伸缩组件33旋转运动、同时带动第一伸缩组件32和第二伸缩组件33沿着对应的导向槽3423进行相互错位运动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1