一种图书馆存取书一体机器人
1.本发明涉及机器人技术领域,具体涉及一种图书馆存取书一体机器人。
背景技术:
2.发展机器人产业,对于打造中国制造新优势,推动服务转型升级,改善人民生活水 平具有重要意义。
3.作为典型的公共服务领域,图书馆从传统图书馆到智慧图书馆经历了多重变革,推广 机器人技术与应用也有利于图书馆的转型。当前的图书馆机器大多都是以咨询查询服务为 主,但在图书整理归类以及上下架取书方面研究较少,而这些方面通常又是繁重单一的工 作。在图书馆日常管理中图书的存取是一项较为耗时费力的工作,并且人工存取图书所能 达到的高度有限,对图书馆的空间资源利用不足,是图书馆空间资源的浪费。
技术实现要素:
4.本发明为了解决现有图书存取时需要通过人工的方式进行存取处理,作业劳动强度大 的问题,进而提出一种图书馆存取书一体机器人。
5.本发明为解决上述技术问题采取的技术方案是:
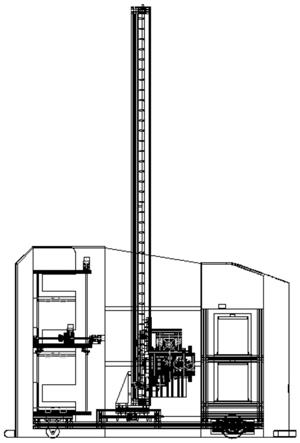
6.一种图书馆存取书一体机器人包括存取书模块、空间运动模块、出书装置模块和行走 模块,空间运动模块设置在行走模块上端的一侧,存取书模块设置在空间运动模块上,存 取书模块通过空间运动模块实现水平、竖直及垂直方向上的移动,出书装置模块设置在行 走模块上端的另一侧。
7.本发明与现有技术相比包含的有益效果是:
8.本发明中的图书馆存取书一体机器人移动灵活,能够对书架书籍进行定位,并且能 够进行图书存取,图书馆使用该机器人代替人工完成图书的自动存取和整理工作,可以减 轻工作者的劳动强度,提高工作效率。
9.图书馆存取书一体机器人是一种用于图书馆图书存取的装置,机器人存取书速度快, 降低了存取书时间,提升了存取书效率,同时机器人的存取可以运用于封闭环境中,减少 人员出入馆藏室,可以实现图书馆存取的无人化,有利于珍贵文献的保存。因此图书馆存 取书一体机器人的创新点主要体现在以下方面:
10.一、提出了一种拨书装置,以保证存书过程中的稳定性,提高了图书的存入效率;
11.二、取书过程设计巧妙,极大降低了该机器人的复杂度。
12.三、机器人的各个模块都是根据简单的机械装置进行设计的,不含有复杂零部件, 重量轻,体积小,方便制造;
13.四、无需对现有图书馆书架进行改造或设计新的图书馆书架;
14.五、相较于移动小车搭载机械臂式机器人,设计更加巧妙,效果更好,控制更加简 单,成本更低。
取书一体机器人包括存取书模块、空间运动模块、出书装置模块和行走模块,空间运动模 块设置在行走模块上端的一侧,存取书模块设置在空间运动模块上,存取书模块通过空间 运动模块实现水平、竖直及垂直方向上的移动,出书装置模块设置在行走模块上端的另一 侧。
50.具体实施方式二:结合图1至图34说明本实施方式,本实施方式所述存取书模块包 括拨书单元1、分书单元2、放书单元3和推书单元4,拨书单元1将书架上的图书拨开 缝隙,通过分书单元2将缝隙两侧的图书分开,推书单元4将放书单元3上的图书推至分 开的两侧图书之间。其它组成和连接方式与具体实施方式一相同。
51.本实施方式的工作过程包括:放书单元3中存放有一待上架图书,首先拨书单元1 将书架上的图书拨开一定缝隙,如图18所示;接着分书单元2开始运动,使得图书间的 缝隙足够大,如图19所示;最后推书单元4开始运动,将待上架图书推入缝隙中,如图 20所示,至此完成上书动作。
52.图书馆书架上的图书摆放情况假设如图16所示,并假定需要在3号和4号的图书中 间插入图书,通常我们拨书的动作是首先用其中一只手按住3号图书,主要是为了防止在 出现缝隙后4号图书左侧的图书倾倒,另外一只手按住4号图书,然后向右拨动4号图书, 直到出现足够的缝隙。
53.具体实施方式三:结合图1至图34说明本实施方式,本实施方式所述拨书单元1包 括定书器1
‑
1和拨动器1
‑
2,定书器1
‑
1固接在放书单元3的一侧,定书器1
‑
1的前端设 有一组固定爪1
‑1‑
1,拨动器1
‑
2的前端设有一组拨动爪1
‑2‑
7,拨动爪1
‑2‑
7与固定爪1
‑1‑
1 相对设置;
54.所述拨动器1
‑
2包括拨动电机1
‑2‑
1、拨动曲柄1
‑2‑
2、拨动摇杆1
‑2‑
3、拨动滑块1
‑2‑
4、 拨动导杆1
‑2‑
5和拨动固定架1
‑2‑
6,拨动电机1
‑2‑
1和拨动导杆1
‑2‑
5均固接在拨动固定 架1
‑2‑
6上,拨动导杆1
‑2‑
5水平设置,拨动电机1
‑2‑
1的电机轴与拨动曲柄1
‑2‑
2的中部 固接,拨动曲柄1
‑2‑
2的一侧与拨动摇杆1
‑2‑
3的一端转动连接,拨动摇杆1
‑2‑
3的另一端 与拨动滑块1
‑2‑
4转动连接,拨动滑块1
‑2‑
4套装在拨动导杆1
‑2‑
5上,拨动滑块1
‑2‑
4通 过连接板1
‑2‑
8与一组拨动爪1
‑2‑
7固接。其它组成和连接方式与具体实施方式二相同。
55.本实施方式中仿照人手拨书的动作来设计拨书单元1,定书器1
‑
1的作用类似于人的 左手,将3号图书按住。拨动器1
‑
2的作用类似于人的右手,按住4号图书并向右拨动图 书。由于一排图书的最外侧有书立支撑,所以图书不会向外倾倒。
56.拨书单元1前端的拨动爪1
‑2‑
7和固定爪1
‑1‑
1的外侧均包裹有橡胶层。如此设计依 靠压住书脊产生的摩擦力将两本图书分开一定间隙。
57.拨动器1
‑
2能够向右运动依靠由拨动曲柄1
‑2‑
2、拨动摇杆1
‑2‑
3和拨动滑块1
‑2‑
4组 成的曲柄滑块机构来实现,曲柄滑块机构简图如图7所示,图中是该机构的两个极限位置, 其中l1为拨书单元拨开书的缝隙,缝隙应足够大,取书时能够夹住绝大部分图书。
58.具体实施方式四:结合图1至图34说明本实施方式,本实施方式所述分书单元2包 括第二分书连杆2
‑
2、第四分书连杆2
‑
4、第六分书连杆2
‑
6、分书丝杠2
‑
7、分书电机2
‑
9、 分书块2
‑
10、分书固定架2
‑
11、分书传动机构、一组第一分书连杆2
‑
1、一组第三分书连 杆2
‑
3和一组第五分书连杆2
‑
5,分书电机2
‑
9固接在分书固定架2
‑
11上,分书电机2
‑
9 的电机轴通过分书传动机构与分书丝杠2
‑
7连接,分书丝杠2
‑
7水平设置,第六分书连杆 2
‑
6的一端
旋装在分书丝杠2
‑
7上,第六分书连杆2
‑
6的另一端分别与一组第五分书连杆 2
‑
5的一端转动连接,一组第五分书连杆2
‑
5的另一端分别与第四分书连杆2
‑
4的后端转 动连接,一组第一分书连杆2
‑
1和一组第三分书连杆2
‑
3的一端分别与分书固定架2
‑
11 转动连接,一组第三分书连杆2
‑
3的另一端分别与第四分书连杆2
‑
4的前端转动连接,一 组第一分书连杆2
‑
1的另一端分别与第二分书连杆2
‑
2的后端转动连接,第二分书连杆2
‑
2 的后端与第四分书连杆2
‑
4的前端固接,第二分书连杆2
‑
2的前端固接有分书块2
‑
10。其 它组成和连接方式与具体实施方式三相同。
59.所述第一分书连杆2
‑
1和第三分书连杆2
‑
3平行设置且第一分书连杆2
‑
1和第三分书 连杆2
‑
3的长度相同。
60.拨书单元1虽然已经具备拨开书的功能,但是却不能拨开较大的缝隙,因此当拨书器 1
‑
2将书拨开一定的距离后,要想在继续拨书,那么就需要施加更大的压力,这样会对图 书造成一定的损害,所以当拨书器1
‑
2将密集的图书拨开一定的缝隙后,就需要另外的部 分将图书分开,该部分即为分书单元2。
61.仅仅靠分书块2
‑
10前端向前运动而将书之间分开的缝隙是远远不够的,所以分书块 2
‑
10前端除了具有向前的运动外,还必须有向右的分书运动,为简化设计,只使用一个 动力源驱动两个方向的运动,同时保证分书单元2前端的朝向不变,采用平行四连杆机构 同时实现两个方向的运动,平行四连杆机构简图如图11所示。f11、f2为机构运动时受 到来自书籍的阻力和摩擦力,m为电机驱动力矩。
62.计算可知若用电机直接驱动该机构,所需的驱动力矩过大,因此先用分书电机2
‑
9驱 动分书丝杠2
‑
7,再来带动平行四连杆机构。整个分书单元的机构简图如图12所示。图 中机构实线位置和虚线位置是该机构的两个极限位置。
63.本实施方式中各分书连杆均通过螺栓连接。
64.本实施方式所述分书块2
‑
10的前端为楔形。
65.由于拨书单元2所拨开书的缝隙不是很大,所以要求分书单元2的前端要很薄,因此 分书单元2前端的分书块2
‑
10设计成楔型,楔型的优点不仅可以满足前面的要求,而且 当楔型端向前运动时,还具备一定的分书功能。
66.所述分书块2
‑
10通过分书连接板2
‑
12与第四分书连杆2
‑
4的前端固接,分书连接板 2
‑
12的一端与第四分书连杆2
‑
4前端的外侧垂直固接,分书连接板2
‑
12的另一端与分书 块2
‑
10后端的内侧垂直固接。
67.所述分书传动机构包括分书主动齿轮2
‑
13和分书从动齿轮2
‑
14,分书主动齿轮2
‑
13 与分书电机2
‑
9的电机轴固接,分书从动齿轮2
‑
14与分书丝杠2
‑
7的一端固接,分书主动 齿轮2
‑
13与分书从动齿轮2
‑
14相啮合。
68.所述分书主动齿轮2
‑
13与分书电机2
‑
9的电机轴之间通过联轴器2
‑
8固接。
69.为控制整个装置的尺寸,加入一对齿轮来改变分书电机2
‑
9的安装位置,整个分书单 元2的尺寸缩短。
70.本实施方式所述分书固定架2
‑
11外侧的上下两端分别各水平固接有一个拨动滑轨1
‑2‑
10,拨动固定架1
‑2‑
6的上下两端分别各固接有一个拨动滑套1
‑2‑
9,每个拨动滑套 1
‑2‑
9分别套装在一个拨动滑轨1
‑2‑
10上,拨动固定架1
‑2‑
6的底部通过底部连杆1
‑2‑
11 与分书块2
‑
10的外侧固接。
71.如此设计的拨动器1
‑
2与分书单元2通过分书固定架2
‑
11及底部连杆1
‑2‑
11进行连 接,在分书单元2的分书块2
‑
10移动的同时,由于底部连杆1
‑2‑
11及拨动滑轨1
‑2‑
10的 作用,拨书器1
‑
2可随其一起运动,从而不影响分书单元2运动。
72.具体实施方式五:结合图1至图34说明本实施方式,本实施方式所述放书单元3包 括放书固定架3
‑
2、放书电机3
‑
3、第一放书连杆3
‑
4、第二放书连杆3
‑
5、放书架3
‑
6和 两组放书合页3
‑
1,放书固定架3
‑
2与分书固定架2
‑
11的外侧固接,放书架3
‑
6后端的内 侧通过两组放书合页3
‑
1与分书固定架2
‑
11转动连接,放书电机3
‑
3设置在放书固定架 3
‑
2上,放书电机3
‑
3的电机轴与第一放书连杆3
‑
4的一端固接,第一放书连杆3
‑
4的另 一端与第二放书连杆3
‑
5的一端转动连接,第二放书连杆3
‑
5的另一端与放书架3
‑
6下端 面的后端转动连接。其它组成和连接方式与具体实施方式四相同。
73.放书单元3为存取书模块中一个用于暂时存放图书的装置,在该装置里只暂时存放一 本书。为保证放绝大多数的书,该放书单元3的装书空间为64
×
300
×
290单位mm。将该 图书馆图书存取书模块安装于图书馆机器人上,为提高图书上架效率,机器人上安装有一 小书架,用于存放需要上架的图书,其与放书单元3的位置关系如图17所示。
74.在图书上架过程中,小书架上的书与放书单元3中的书呈垂直关系,若将待上架图书 从小书架上移动到放书单元3中,需将放书单元3旋转90
°
,因此选用曲柄摇杆机构实现 这一动作。曲柄摇杆机构简图如图14所示。摇杆曲柄机构通过放书电机3
‑
3进行驱动, 放书架3
‑
6下端面向后倾斜,以便图书滑入其中。
75.具体实施方式六:结合图1至图34说明本实施方式,本实施方式所述推书单元4包 括推书导轨4
‑
1、推书丝杠4
‑
2、推书板4
‑
3、推书连接板4
‑
4和推书电机4
‑
5,推书导轨 4
‑
1和推书丝杠4
‑
2分别水平固接在放书架3
‑
6外侧壁的上下两侧,推书电机4
‑
5固接在 放书架3
‑
6的外侧壁上,推书电机4
‑
5的电机轴与推书丝杠4
‑
2的一端固接,推书板4
‑
3 垂直设置在推书导轨4
‑
1与推书丝杠4
‑
2之间,且推书板4
‑
3设置在放书架3
‑
6的内部, 推书板4
‑
3的中部通过推书连杆4
‑
6与推书连接板4
‑
4的中部固接,推书连接板4
‑
4的上 端与推书导轨4
‑
1滑动连接,推书连接板4
‑
4的下端与推书丝杠4
‑
2转动连接。其它组成 和连接方式与具体实施方式五相同。
76.在分书单元2将图书分开一定距离后,推书单元4用于将待上架的图书从放书单元3 上推到图书馆书架上。
77.推书单元4动力源为推书电机4
‑
5,采用梯型推书丝杠4
‑
2将旋转运动转换为直线运 动。推书单元4的推书板4
‑
3直接和书接触,其前端材料使用橡胶材料。
78.本实施方式所述推书连接板4
‑
4的上端通过直线轴承4
‑
7与推书导轨4
‑
1滑动连接, 推书连接板4
‑
4的下端通推书螺母4
‑
8与推书丝杠4
‑
2转动连接。
79.本实施方式中为保证推书运动平稳进行,配合使用了直线轴承4
‑
7。
80.本实施方式所述推书板4
‑
3上端的前侧固接有辅助条4
‑
9,辅助条4
‑
9的前端固接有挡 块4
‑
10。
81.辅助条4
‑
9设置在推书板4
‑
3上方靠近定书器1
‑
1侧,其前端采用橡胶材料,用于模 仿人体手指,用于从图书馆书架上取书。
82.具体实施方式七:结合图1至图34说明本实施方式,本实施方式所述空间运动模块 包括竖直升降单元11、水平运动单元22和垂直进给单元33,水平运动单元22设置在行 走模
块的上端,竖直升降单元11设置在水平运动单元22上,垂直进给单元33设置在竖 直升降单元11上。其它组成和连接方式与具体实施方式一相同。
83.当机器人找到了待存取图书所在书架后,还需要空间运动模块对待存取图书进行空间 定位,精准找到图书存取位置。空间运动模块主要包括三个沿直线运动的单元,各单元均 采用滚珠丝杠机构,电机驱动。为了保证整个运动精确平稳进行,采用直线导轨和滑块来 配合该机构的运动。
84.通过竖直升降单元11的升降作用可将图书归还到指定高度的书架层上,该机构的大 部分支撑件使用通用铝合金型材。
85.机器人沿水平方向进行定位时,可利用机器人的行走模块进行定位,但机器人行走模 块的定位精度不高,所以需要水平运动单元22来确保水平方向上的定位。
86.垂直进给单元33用来调整存取书模块与图书馆书架之间的距离,以保证图书顺利存 取。
87.本实施方式所述水平运动单元22包括水平运动端、水平运动电机、水平运动丝杠、 水平运动螺母和一组水平直线导轨,水平运动丝杠和一组水平直线导轨分别沿长度方向设 置在行走模块的上端,水平运动电机的电机轴与水平运动丝杠的一端连接,水平运动螺母 与水平运动丝杠转动连接,水平运动螺母的外侧固接有水平运动端,水平运动端的下端与 一组水平直线导轨滑动连接;
88.竖直升降单元11包括竖直升降端、竖直升降电机、竖直升降丝杠、竖直升降螺母和 一组竖直直线导轨,竖直升降丝杠和一组竖直直线导轨分别垂直设置在水平运动端的上 端,竖直升降电机的电机轴与竖直升降丝杠的一端连接,竖直升降螺母与竖直升降丝杠转 动连接,竖直升降螺母的外侧固接有竖直升降端,竖直升降端的后端与一组竖直直线导轨 滑动连接;
89.垂直进给单元33包括垂直进给端、垂直进给电机、垂直进给丝杠、垂直进给螺母和 一组垂直直线导轨,垂直进给丝杠和一组垂直直线导轨分别垂直设置在竖直升降端的前 端,且垂直进给丝杠和一组垂直直线导轨的长度方向与水平运动丝杠的长度方向垂直设 置,垂直进给电机的电机轴与垂直进给丝杠的一端连接,垂直进给螺母与垂直进给丝杠转 动连接,垂直进给螺母的外侧固接有垂直进给端,垂直进给端的下端与一组垂直直线导轨 滑动连接,存取书模块设置在垂直进给端的上端。
90.具体实施方式八:结合图1至图34说明本实施方式,本实施方式所述出书装置模块 包括小书架111和出书机构222,出书机构222设置在小书架111的一侧。其它组成和连 接方式与具体实施方式一相同。
91.出书模块用于机器人携带多本图书,同时将携带的图书输送到放书装置中。
92.小书架111长度和宽度两个方向上的尺寸,可根据图书馆两书架间的距离和书的尺寸 来确定,为保证该机器人的稳定性,小书架111采用三层来放置图书,每一层的高度可根 据图书馆书架每层的高度来确定。小书架111相对于水平面倾斜一定的角度,保证出书装 置能够持续的将书输送到放书装置中,同时使小书架111上的书保持竖立而不倾倒。
93.本实施方式所述小书架111由下至上设置有三层架体,每层架体分别包括托板、后挡 板和两个侧板,托板的两侧分别各与一个侧板固接,后挡板固接在托板的后端,侧板上设 有出书槽。
94.所述托板靠近出书机构222的一侧向下倾斜设置。
95.具体实施方式九:结合图1至图34说明本实施方式,本实施方式所述出书机构222 包括竖直移动机构222
‑
1、垂直移动机构222
‑
2和水平输送机构222
‑
3,水平输送机构222
‑
3 设置在竖直移动机构222
‑
1上,垂直移动机构222
‑
2设置在水平输送机构222
‑
3上。其它 组成和连接方式与具体实施方式八相同。
96.出书机构222的前端通过小书架111上的出书槽与图书接触,依靠该前端与图书之间 的摩擦力,将图书拖入到放书装置中。
97.该出书机构222能够实现三个方向的运动:竖直升降运动,保证装置前端到达小书架 的每一层;垂直进给运动,保证装置前端可以贴紧图书和远离图书;水平输送运动,将书 输送到放书装置中。竖直升降运动和水平输送运动通过滚珠丝杠机构来实现,为了保证运 动平稳进行,该机构配合使用光轴和直线轴承,采用电机进行驱动。垂直进给运动采用电 机直接驱动平行四连杆机构来实现,简化出书机构222的结构,平行四连杆机构简图如图 31所示。
98.所述竖直移动机构222
‑
1包括竖直移动框架222
‑1‑
1、竖直移动导轨222
‑1‑
2、竖直移 动丝杠222
‑1‑
3、竖直移动电机222
‑1‑
4和竖直移动端222
‑1‑
5,竖直移动框架222
‑1‑
1沿 高度方向设置在小书架111的一侧,竖直移动导轨222
‑1‑
2和竖直移动丝杠222
‑1‑
3平行 设置在竖直移动框架222
‑1‑
1上,且竖直移动导轨222
‑1‑
2和竖直移动丝杠222
‑1‑
3沿小书 架111的高度方向设置,竖直移动电机222
‑1‑
4的电机轴与竖直移动丝杠222
‑1‑
3的一端 连接,竖直移动丝杠222
‑1‑
3上旋装有竖直移动螺母222
‑1‑
6,竖直移动端222
‑1‑
5的一侧 与竖直移动螺母222
‑1‑
6固接,竖直移动端222
‑1‑
5的另一端与竖直移动导轨222
‑1‑
2滑动 连接;
99.水平输送机构222
‑
3包括水平输送框架222
‑3‑
1、水平输送导轨222
‑3‑
2、水平输送丝 杠222
‑3‑
3、水平输送电机222
‑3‑
4和水平输送端222
‑3‑
5,水平输送框架222
‑3‑
1设置在 竖直移动端222
‑1‑
5上,水平输送导轨222
‑3‑
2和水平输送丝杠222
‑3‑
3平行设置在水平输 送框架222
‑3‑
1上,且水平输送导轨222
‑3‑
2和水平输送丝杠222
‑3‑
3沿小书架111的宽度 方向设置,水平输送电机222
‑3‑
4的电机轴与水平输送丝杠222
‑3‑
3的一端连接,水平输 送丝杠222
‑3‑
3上旋装有水平输送螺母222
‑3‑
6,水平输送端222
‑3‑
5的一侧与水平输送螺 母222
‑3‑
6固接,水平输送端222
‑3‑
5的另一侧与水平输送导轨222
‑3‑
2滑动连接;
100.垂直移动机构222
‑
2包括垂直移动电机222
‑2‑
1、一组第一出书连杆222
‑2‑
2、一组第 二出书连杆222
‑2‑
3、一组第三出书连杆222
‑2‑
4和出书端头222
‑2‑
5,垂直移动电机222
‑2‑
1 固接在水平输送端222
‑3‑
5上,一组第一出书连杆222
‑2‑
2的一端与垂直移动电机222
‑2‑
1 的电机轴固接,一组第一出书连杆222
‑2‑
2的另一端与一组第二出书连杆222
‑2‑
3的一端 转动连接,一组第二出书连杆222
‑2‑
3的另一端与一组第三出书连杆222
‑2‑
4的一端转动 连接,一组第三出书连杆222
‑2‑
4的另一端与水平输送端222
‑3‑
5转动连接,出书端头 222
‑2‑
5固接在一组第二出书连杆222
‑2‑
3的外侧。
101.所述第一出书连杆222
‑2‑
2和第三出书连杆222
‑2‑
4平行设置且第一出书连杆222
‑2‑
2 和第三出书连杆222
‑2‑
4的长度相同。
102.所述水平输送端222
‑3‑
5的外侧端面上设有橡胶层。出书机构222的前端直接和书接 触,且当输送书时要与书之间有一定的摩擦力,所以出书机构222的前端与书接触的部
分 材料为橡胶材料。
103.具体实施方式十:结合图1至图34说明本实施方式,本实施方式所述行走模块包括 底框架1111、万向轮2222、两个驱动轮3333和步进电机,万向轮2222设置在底框架1111 下端面前端的中部,驱动轮3333设置在底框架1111下端面后端的两侧,步进电机固接在 底框架1111上,步进电机的电机轴通过传动链分别与两个驱动轮3333连接,空间运动模 块和出书装置模块分别设置在底框架1111的上端面上。其它组成和连接方式与具体实施 方式一相同。
104.行走模块采用三轮的方式,即前面一个轮,后面两个轮,前面的轮为万向轮2222, 后面的两个轮为驱动轮3333,三个轮子采用橡胶轮,以来达到减小噪音和减震的效果。 该行走模块的转弯靠的是后面两个驱动轮3333的速差。该行走模块的动力源采用步进电 机,保证该行走模块的定位精度。电机和驱动轮3333之间采用链传动系统。该机器人需 用到两块较大的电池,为保证该机器人的平稳性,将电池的固定架搭建在行走模块两驱动 轮3333的上方。该行走模块具有一定的定位精度、较好的灵活性和稳定性、噪音小、成 本低等优点。
105.该机器人的外观设计主要是在框架外增加外罩,以及在机器人的前后各增加了一个防 撞条,以保护机器人和图书馆内的物品,减小外界环境对该机器人内部系统的破坏,同时 增加该机器人的美观。
106.该机器人的存取书过程描述如下。
107.存书过程:首先放书单元3运动,使得放书架3
‑
6的开口方向朝向小书架,出书机构 222将待存书籍输送进放书架3
‑
6中,然后放书架3
‑
6旋转90
°
,使得开口方向朝向图书 馆书架;接着根据待存书籍信息,行走模块运动,将机器人移动到相关图书馆书架处;然 后空间运动模块运动,将存取书模块精确移动到待存书籍的存放位置;最后拨书单元1、 分书单元2、推书单元4依次运动,完成存书动作。
108.取书过程:该机器人将存取书模块精确移动到待取书位置后,先将拨动器1
‑
2运动到 极限位置,使得定书器1
‑
1与拨动器1
‑
2之间的距离达到最大,再将推书板4
‑
3向前移动 到极限位置,然后空间运动模块运动,使推书板4
‑
3上的辅助条4
‑
9扒动图书,模仿人取 书动作,将图书转动一定角度,接着依靠拨书单元1对图书进行夹紧,最后放书架3
‑
6旋 转90
°
,空间运动模块运动将待取图书放到小书架上,完成取书。
109.在该机器人完成存取书动作后,可依靠该辅助条4
‑
9或定书器1
‑
1等结构向左推动图 书外侧的书立,使图书紧凑。
110.虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例 仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多 修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范 围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要 求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他 所述实施例中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1