一种自动分类回收垃圾的智能餐桌的制作方法
1.本技术涉及家具的领域,尤其是涉及一种自动分类回收垃圾的智能餐桌。
背景技术:
2.垃圾分类就是将垃圾分门别类地投放,并通过分类地清运和回收使之重新变成资源。从国内外各城市对生活垃圾分类的方法来看,大致都是根据垃圾的成分构成、产生量,结合本地垃圾的资源利用和处理方式来进行分类。我国的生活垃圾一般可分为四大类:可回收垃圾、厨余垃圾、有害垃圾和其他垃圾。
3.一般家庭的生活垃圾回收都需要按垃圾的种类分别设置不同的垃圾桶,垃圾桶增多,不仅不美观,而且较为占用家庭空间。并且,目前一般家庭的垃圾分类依赖人的经验对垃圾进行手动分类,不仅对人的生活经验提出要求,而且容易发生错误,分类失误。
4.cn201811208696.1公开了一种便于垃圾回收的餐桌,其技术方案为:包括桌腿;桌面板,其安装在桌腿的顶部,且桌面板上间隔的开设有若干个垃圾回收口;垃圾输送腔,其以能够拆卸的方式安装在桌面板的底部,垃圾输送腔呈漏斗形,且垃圾输送腔的顶部进口与所有的垃圾回收口相对应,垃圾输送腔的底部出口悬空设置;以及垃圾箱,其顶部开口,垃圾箱活动的安装在垃圾输送腔的底部开口的正下方。
5.该便于垃圾回收的餐桌具有以下优点:在桌面板上间隔的开设有若干个垃圾回收口,可将垃圾倒入垃圾回收口中,垃圾通过垃圾输送腔落入垃圾箱内,以达到垃圾回收的目的;垃圾箱内包括液体腔和固体腔,液体腔和固体腔通过一过滤板进行分隔,以将固体垃圾和液体垃圾进行分类处理;每个垃圾回收口的顶部设置有一能够开闭的盖体,倾倒餐盘上的垃圾时,可将垃圾回收口的盖体打开后再倾倒,倾倒完毕后关闭上盖体,隔绝垃圾输送腔内的气味。
6.但是,该便于垃圾回收的餐桌还具有以下缺点:垃圾箱设置于桌面板下方,不能查看垃圾箱的装入情况,无法判断垃圾箱是否满载;只能对液体垃圾和固体垃圾作出分类,无法应对更多种类的垃圾分类,垃圾分类种类单一;对垃圾种类无法作出自主判断,依赖人的主观判断。
7.因此,需要一种可判断垃圾箱是否满载、垃圾分类种类全面、自主判断垃圾种类的垃圾分类回收餐桌。
技术实现要素:
8.为了解决无法判断垃圾箱是否满载、垃圾分类种类单一、垃圾分类依赖人的主观判断的问题,本技术提供一种自动分类回收垃圾的智能餐桌。
9.本技术提供一种自动分类回收垃圾的智能餐桌,包括餐桌本体、开盖机构、选择机构、回收箱体以及控制箱:所述回收箱体设置于餐桌本体内,包括若干个单体回收箱,每个单体回收箱上部设置有磁吸框,并与单体回收箱通过编织物连接;
所述开盖机构,与控制箱电性连接,设置在餐桌本体上部,与餐桌本体固定连接,未开盖状态开盖机构与餐桌本体形成完整的桌面,开盖状态形成垃圾投入口;所述选择机构,与控制箱电性连接,设置在餐桌本体内,与餐桌本体固定连接,位于开盖机构正下方和回收箱体的正上方,与开盖机构和回收箱体配合,移动至单体回收箱上方将磁吸框吸起后上升,拉伸编织物形成坡型通道,将开盖机构投入的垃圾经由坡型通道送入对应的单体回收箱内;所述选择机构包括:升降机构,与控制箱电性连接,设置于选择机构下部,与餐桌本体固定连接,进行竖直向位移以对应单体回收箱的竖直向位置;水平位移机构,与控制箱电性连接,设置于选择机构上部,与餐桌本体固定连接,进行水平向位移以对应单体回收箱的水平位置,并与升降机构驱动连接;所述控制箱包括:控制模块;图像采集模块;图像识别模块;操作面板;语音模块。
10.进一步的,所述餐桌本体包括:安装口,设置于餐桌本体的桌面上,与开盖机构配合;拉盖,设置于餐桌本体侧面,与餐桌本体通过铰链转动连接,并与回收箱体配合。
11.通过采用上述技术方案,可从侧面将回收箱体取出并进行清理,提高了使用时的方便性。
12.进一步的,所述开盖机构包括:盖板本体,对称设置在开盖机构上部,两端对称设置有盖板转轴,并通过盖板转轴与餐桌本体的桌面转动连接;蜗轮,套接在盖板转轴上并与盖板转轴固定连接;蜗杆电机,设置在餐桌本体的桌面下方并与餐桌本体的桌面下表面固定连接,电机轴从两侧伸出;蜗杆本体,分别与蜗杆电机两侧伸出的电机轴固定连接,并与蜗轮通过螺纹驱动连接;蜗杆座,套接在蜗杆本体的末端,与蜗杆本体转动连接,并与餐桌本体固定连接;所述盖板本体与餐桌本体的安装口配合,组合后刚好填满整个安装口;所述蜗杆本体包括:蜗杆螺纹部,设置在蜗杆本体的近蜗轮的一端,与所述蜗轮配合;蜗杆联轴器,设置在蜗杆的近蜗杆电机的一端,套接在蜗杆电机的电机轴上,并与蜗杆电机的电机轴固定连接;所述蜗杆电机与控制模块电性连接。
13.通过采用上述技术方案,由控制模块控制开盖机构具体开关情况。开盖机构关盖状态下,盖板本体与安装口配合形成完整的桌面,不影响平时的正常使用;开盖机构开盖状态下,形成垃圾投入口,垃圾进入餐桌本体内部。
14.进一步的,所述升降机构包括:轴承垫板,对称设置在所述升降机构底部;轴承座,对称设置在轴承垫板的两端,内部活动设置有轴承;丝杆架,侧面为双槽结构,分别设置在轴承座上方,底部与轴承转动连接;丝杆本体,竖直设置在丝杆架上方,底部与丝杆架上部驱动连接;芯轴架,设置在丝杆本体上方,与丝杆本体转动连接并与所述餐桌本体固定连接;升降电机,电机轴一侧竖直向上,设置在所述升降机构底部;双槽皮带轮,套接在所述升降电机的电机轴上,与升降电机驱动连接,并与丝杆架传动配合;所述升降电机与控制模块电性连接。
15.进一步的,所述水平位移机构包括:安装座,呈框状,与所述丝杆本体驱动连接;第一滑移器,设置在安装座内,与安装座的侧壁平行,并与安装座滑动连接;第二滑移器,设置在安装座内,与第一滑移器垂直设置,并与安装座滑动连接;所述选择框,同时与第一滑移
器和第二滑移器驱动连接。
16.进一步的,所述安装座包括:第一滑移轨道,对称设置在安装座的相对的一组侧壁内;第二滑移轨道,对称设置在安装座相对的另一组侧壁内,竖直方向上高度高于第一滑移轨道;连接板,设置在安装座两端,与丝杆本体驱动连接;螺孔,设置在连接板两端,与丝杆本体配合;所述第一滑移器包括:第一滑移电机,设置在一侧的第一滑移轨道上,与第一滑移轨道滑动连接;第一回转轴架,设置在另一侧的第一滑移轨道上,与第一滑移轨道滑动连接;第一回转轴本体,设置在第一滑移电机和第一回转轴架之间,一端与第一滑移电机驱动连接,另一端与第一回转轴架转动连接;第一滑移联轴器,设置在第一滑移电机和第一回转轴本体之间,固定连接第一滑移电机的电机轴和第一回转轴本体;所述第一滑移电机与控制模块电性连接;所述第二滑移器包括:第二滑移电机,设置在一侧的第二滑移轨道上,与第二滑移轨道滑动连接;第二回转轴架,设置在另一侧的第二滑移轨道上,与第二滑移轨道滑动连接;第二回转轴本体,设置在第二滑移电机和第二回转轴架之间,一端与第二滑移电机驱动连接,另一端与第二回转轴架转动连接;第二滑移联轴器,设置在第二滑移电机和第二回转轴本体之间,固定连接第二滑移电机的电机轴和第二回转轴本体;所述第二滑移电机与控制模块电性连接;所述选择框,包括:第一回转轴套,对称设置在选择框的外侧壁上并与选择框的外侧壁固定连接,与所述第一回转轴本体通过螺纹驱动连接;第二回转轴套,对称设置在选择框的外侧壁上并与选择框的外侧壁固定连接,与所述第一回转轴本体通过螺纹驱动连接,所述第二回转轴套竖直方向上高度高于第一回转轴套。
17.进一步的,所述回收箱体包括:若干个单体回收箱,每个单体回收箱盛放一种垃圾,且不同单体回收箱盛放的垃圾种类不同;所述磁吸框,分别设置在每个单体回收箱上,与单体回收箱通过编织物连接;所述编织物为弹性材料,分别与单体回收箱和磁吸框固定连接。
18.通过采用上述技术方案,可实现在三维空间任意方向的移动,水平位移机构与单体回收箱的水平向位置匹配,升降机构与单体回收箱的竖直向位置匹配。二者配合,可实现水平位移机构根据识别出的垃圾种类对应的单体回收箱位置,将选择框移动并与单体回收箱的水平向位置匹配,升降机构下降至单体回收箱位置并将单体回收箱上的磁吸框吸起,并上升后水平位移至开盖机构正下方,此时连接单体回收箱和磁吸框的编织物被拉伸,形成坡型通道,接取投入的垃圾并通过坡型通道进入对应的单体回收箱内。
19.并且,由于第二滑移轨道高于第一滑移轨道,第二回转轴套高于第一回转轴套,水平位移机构在进行x轴和y轴移动时相互不干涉,保证了水平位移机构的稳定运行。
20.进一步的,所述磁吸框为电磁铁,与控制模块电性连接;所述单体回收箱为非铁磁材料;所述选择框为铁磁材料。
21.通过采用上述技术方案,由于磁吸框为电磁铁,可在选择框移动至对应的单体回收箱上方时将电磁铁通电,该磁吸框与选择框磁吸连接;并且由于单体回收箱为非铁磁材料,电磁铁通电时,单体回收箱不会被吸引,选择框上升后,单体回收箱和磁吸框分离并拉
伸编织物。
22.进一步的,还包括:若干个光栅,设置在单体回收箱侧壁上部,与控制模块电性连接。
23.通过采用上述技术方案,可监测每个单体回收箱内的垃圾装载量,若单体回收箱装满,则向控制模块发出信号,提示清理该单体回收箱,减少了人工观察单体回收箱装载情况的工作量,提高了自动化程度。
24.进一步的,所述控制箱设置在餐桌本体的桌面上;所述控制模块,用于接收和发出信号;所述图像采集模块,用于采集垃圾图像信息;所述图像识别模块,与图像采集模块和控制模块连接,用于接收图像采集模块采集的图像,分析并根据内置算法进行识别,并向控制模块发出信号;所述操作面板,与控制模块连接,用于对垃圾进行手动分类;所述语音模块与控制模块连接,用于接收控制模块信号并语音播报信息。
25.通过采用上述技术方案,图像采集模块采集垃圾的图像信息,并由图像识别模块进行分析,通过内置算法识别出垃圾种类后向控制模块发出信号,控制选择机构选择待投入垃圾对应的单体回收箱,识别过程自动化,不依赖人工,排除了人工分类错误的可能性,提高了垃圾分类回收的正确性;针对图像识别模块无法准确识别的垃圾或者使用者已知垃圾种类需要大量投入该种垃圾的情况,可在操作面板手动选择垃圾种类,控制选择机构选择正确的单体回收箱形成坡型通道,并打开开盖机构,将垃圾投入;语音模块可在每次识别出垃圾种类后进行该种垃圾种类的语音播报,对使用者进行垃圾分类知识宣传教育,并且在光栅识别到单体回收箱装满后,语音模块可语音播报具体哪个单体回收箱装满,提示使用者进行清理。
26.综上所述,本技术包括以下有益技术效果:1.将家庭垃圾回收时所需设置的多个单体回收箱集成在餐桌本体内,用餐完毕后可直接将垃圾回收,提高了垃圾回收的方便性,减少了使用空间;2.可自动识别垃圾种类,并将垃圾送入指定类别的单体回收箱内,排除了人工分类错误的可能性,减少了人工分类的工作量,提高了垃圾分类回收的方便性和正确性;3.设置有光栅监测每个单体回收箱的装载情况,提示使用者及时清理,减少了人工观察单体回收箱装载情况的工作量,提高了自动化程度。
27.附图说明
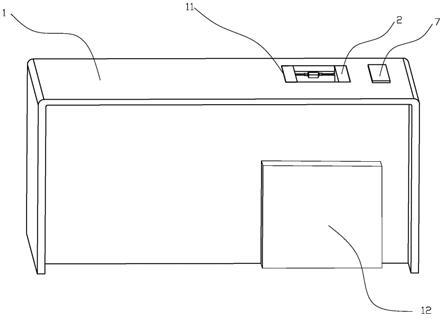
28.图1是本技术实施例的一种自动分类回收垃圾的智能餐桌的外部视图。
29.图2是本技术实施例的一种自动分类回收垃圾的智能餐桌的开盖机构的局部放大图。
30.图3是本技术实施例的一种自动分类回收垃圾的智能餐桌的选择机构的局部放大图。
31.图4是本技术实施例的一种自动分类回收垃圾的智能餐桌的回收箱体的局部放大图。
32.图5是本技术实施例的一种自动分类回收垃圾的智能餐桌的升降机构的爆炸视图。
33.图6是本技术实施例的一种自动分类回收垃圾的智能餐桌的水平位移机构的爆炸视图。
34.图7是本技术实施例的一种自动分类回收垃圾的智能餐桌的逻辑图。
35.附图标记说明:餐桌本体1,安装口11,拉盖12,开盖机构2,盖板本体21,盖板转轴211,蜗轮22,蜗杆本体23,蜗杆螺纹部231,蜗杆联轴器232,蜗杆座24,蜗杆电机25,选择机构3,升降机构4,升降电机41,双槽皮带轮411,轴承垫板42,轴承座43,轴承44,丝杆架45,丝杆本体46,芯轴架47水平位移机构5,安装座51,第一滑移轨道511,第二滑移轨道512,连接板513,螺孔514,第一滑移器52,第一滑移电机521,第一回转轴本体522,第一滑移联轴器523,第一回转轴架524,第二滑移器53,第二滑移电机531,第二回转轴本体532,第二滑移联轴器533,第二回转轴架534, 选择框54,第一回转轴套541,第二回转轴套542,回收箱体6,单体回收箱61,磁吸框62,编织物63,光栅64,控制箱7,控制模块71,图像采集模块72,图像识别模块73,操作面板74,语音模块75。
具体实施方式
36.下面对照附图,通过对实施例的描述,本技术的具体实施方式如所涉及的各构件的形状、构造、各部分之间的相互位置及连接关系、各部分的作用及工作原理、制造工艺及操作使用方法等,作进一步详细的说明,以帮助本领域技术人员对本发明的发明构思、技术方案有更完整、准确和深入的理解。为方便说明,本技术提及方向以附图所示方向为准。
37.参照图1
‑
图7所示,一种自动分类回收垃圾的智能餐桌,包括餐桌本体1、开盖机构2、选择机构3、回收箱体6以及控制箱7:所述回收箱体6设置于餐桌本体1内,包括若干个单体回收箱61,每个单体回收箱61上部设置有磁吸框62,并与单体回收箱61通过编织物63连接;所述开盖机构2,与控制箱7电性连接,设置在餐桌本体1上部,与餐桌本体1固定连接,未开盖状态开盖机构2与餐桌本体1形成完整的桌面,开盖状态形成垃圾投入口;所述选择机构3,与控制箱7电性连接,设置在餐桌本体1内,与餐桌本体1固定连接,位于开盖机构2正下方和回收箱体6的正上方,与开盖机构2和回收箱体6配合,移动至单体回收箱61上方将磁吸框62吸起后上升,拉伸编织物63形成坡型通道,将开盖机构2投入的垃圾经由坡型通道送入对应的单体回收箱61内;所述选择机构3包括:升降机构4,与控制箱7电性连接,设置于选择机构3下部,与餐桌本体1固定连接,进行竖直向位移以对应单体回收箱61的竖直向位置;水平位移机构5,与控制箱7电性连接,设置于选择机构3上部,与餐桌本体1固定连接,进行水平向位移以对应单体回收箱61的水平位置,并与升降机构4驱动连接;
所述控制箱7包括:控制模块71;图像采集模块72;图像识别模块73;操作面板74;语音模块75。
38.所述餐桌本体1包括:安装口11,设置于餐桌本体1的桌面上,与开盖机构2配合;拉盖12,设置于餐桌本体1侧面,与餐桌本体1通过铰链转动连接,并与回收箱体6配合。
39.所述开盖机构2包括:盖板本体21,对称设置在开盖机构2上部,两端对称设置有盖板转轴211,并通过盖板转轴211与餐桌本体1的桌面转动连接;蜗轮22,套接在盖板转轴211上并与盖板转轴211固定连接;蜗杆电机25,设置在餐桌本体1的桌面下方并与餐桌本体1的桌面下表面固定连接,电机轴从两侧伸出;蜗杆本体23,分别与蜗杆电机25两侧伸出的电机轴固定连接,并与蜗轮22通过螺纹驱动连接;蜗杆座24,套接在蜗杆本体23的末端,与蜗杆本体23转动连接,并与餐桌本体1固定连接;所述盖板本体21与餐桌本体1的安装口11配合,组合后刚好填满整个安装口11;所述蜗杆本体23包括:蜗杆螺纹部231,设置在蜗杆本体23的近蜗轮22的一端,与所述蜗轮22配合;蜗杆联轴器232,设置在蜗杆的近蜗杆电机25的一端,套接在蜗杆电机25的电机轴上,并与蜗杆电机25的电机轴固定连接;所述蜗杆电机25与控制模块71电性连接。
40.所述升降机构4包括:轴承垫板42,对称设置在所述升降机构4底部;轴承座43,对称设置在轴承垫板42的两端,内部活动设置有轴承44;丝杆架45,侧面为双槽结构,分别设置在轴承座43上方,底部与轴承44转动连接;丝杆本体46,竖直设置在丝杆架45上方,底部与丝杆架45上部驱动连接;芯轴架47,设置在丝杆本体46上方,与丝杆本体46转动连接并与所述餐桌本体1固定连接;升降电机41,电机轴一侧竖直向上,设置在所述升降机构4底部;双槽皮带轮411,套接在所述升降电机41的电机轴上,与升降电机41驱动连接,并与丝杆架45传动配合;所述升降电机41与控制模块71电性连接。
41.所述水平位移机构5包括:安装座51,呈框状,与所述丝杆本体46驱动连接;第一滑移器52,设置在安装座51内,与安装座51的侧壁平行,并与安装座51滑动连接;第二滑移器53,设置在安装座51内,与第一滑移器52垂直设置,并与安装座51滑动连接;所述选择框54,同时与第一滑移器52和第二滑移器53驱动连接。
42.所述安装座51包括:第一滑移轨道511,对称设置在安装座51的相对的一组侧壁内;第二滑移轨道512,对称设置在安装座51相对的另一组侧壁内,竖直方向上高度高于第一滑移轨道511;连接板513,设置在安装座51两端,与丝杆本体46驱动连接;螺孔514,设置在连接板513两端,与丝杆本体46配合;所述第一滑移器52包括:第一滑移电机521,设置在一侧的第一滑移轨道511上,与第一滑移轨道511滑动连接;第一回转轴架524,设置在另一侧的第一滑移轨道511上,与第一滑移轨道511滑动连接;第一回转轴本体522,设置在第一滑移电机521和第一回转轴架524之间,一端与第一滑移电机521驱动连接,另一端与第一回转轴架524转动连接;第一滑移联轴器523,设置在第一滑移电机521和第一回转轴本体522之间,固定连接第一滑移电机521的电机轴和第一回转轴本体522;所述第一滑移电机521与控制模块71电性连接;所述第二滑移器53包括:第二滑移电机531,设置在一侧的第二滑移轨道512上,与
第二滑移轨道512滑动连接;第二回转轴架534,设置在另一侧的第二滑移轨道512上,与第二滑移轨道512滑动连接;第二回转轴本体532,设置在第二滑移电机531和第二回转轴架534之间,一端与第二滑移电机531驱动连接,另一端与第二回转轴架534转动连接;第二滑移联轴器533,设置在第二滑移电机531和第二回转轴本体532之间,固定连接第二滑移电机531的电机轴和第二回转轴本体532;所述第二滑移电机531与控制模块71电性连接;所述选择框54,包括:第一回转轴套541,对称设置在选择框54的外侧壁上并与选择框54的外侧壁固定连接,与所述第一回转轴本体522通过螺纹驱动连接;第二回转轴套542,对称设置在选择框54的外侧壁上并与选择框54的外侧壁固定连接,与所述第一回转轴本体522通过螺纹驱动连接,所述第二回转轴套542竖直方向上高度高于第一回转轴套541。
43.所述回收箱体6包括:若干个单体回收箱61,每个单体回收箱61盛放一种垃圾,且不同单体回收箱61盛放的垃圾种类不同;所述磁吸框62,分别设置在每个单体回收箱61上,与单体回收箱61通过编织物63连接;所述编织物63为弹性材料,分别与单体回收箱61和磁吸框62固定连接。
44.所述磁吸框62为电磁铁,与控制模块71电性连接;所述单体回收箱61为非铁磁材料;所述选择框54为铁磁材料。
45.还包括:若干个光栅64,设置在单体回收箱61侧壁上部,与控制模块71电性连接。
46.所述控制箱7设置在餐桌本体1的桌面上;所述控制模块71,用于接收和发出信号;所述图像采集模块72,用于采集垃圾图像信息;所述图像识别模块73,与图像采集模块72和控制模块71连接,用于接收图像采集模块72采集的图像,分析并根据内置算法进行识别,并向控制模块71发出信号;所述操作面板74,与控制模块71连接,用于对垃圾进行手动分类;所述语音模块75与控制模块71连接,用于接收控制模块71信号并语音播报信息。
47.本技术实施例,一种自动分类回收垃圾的智能餐桌的工作原理为:使用时,将待投入垃圾放置在控制箱前,图像采集模块采集垃圾的图像信息,并由图像识别模块进行分析,通过内置算法识别出垃圾种类后向控制模块发出信号,并控制语音模块播报该垃圾种类的信息;首先,控制模块控制第一滑移电机和第二滑移电机正转,使选择框位移至待投入垃圾种类对应的单体回收箱正上方;然后,控制模块控制升降电机正转,使选择框下降至于磁吸框紧贴;接着,控制模块控制磁吸框的电磁铁通电,磁吸框与选择框磁吸连接,此时控制模块先控制升降电机反转,再控制第一滑移电机和第二滑移电机反转,将选择框移动至初始位置,磁吸框与选择框磁吸并随之移动,拉伸编织物并在选择框和待投入垃圾种类对应的单体回收箱之间形成坡形通道;然后,控制模块控制蜗杆电机正转,打开开盖机构,投入垃圾经由坡形通道进入对应单体回收箱;最后,控制模块控制蜗杆电机反转,关闭开盖机构。
48.本技术实施例中,通过在餐桌本体侧面设置拉盖,可从侧面将回收箱体取出并进行清理,提高了使用时的方便性。
49.通过设置开盖机构,开盖机构关盖状态下,盖板本体与安装口配合形成完整的桌
面,不影响平时的正常使用;开盖机构开盖状态下,形成垃圾投入口,垃圾进入餐桌本体内部。
50.通过设置选择机构,可实现在三维空间任意方向的移动,水平位移机构与单体回收箱的水平向位置匹配,升降机构与单体回收箱的竖直向位置匹配。二者配合,可实现水平位移机构根据识别出的垃圾种类对应的单体回收箱位置,将选择框移动并与单体回收箱的水平向位置匹配,升降机构下降至单体回收箱位置并将单体回收箱上的磁吸框吸起,并上升后水平位移至开盖机构正下方,此时连接单体回收箱和磁吸框的编织物被拉伸,形成坡型通道,接取投入的垃圾并通过坡型通道进入对应的单体回收箱内。
51.另外,由于第二滑移轨道高于第一滑移轨道,第二回转轴套高于第一回转轴套,水平位移机构在进行x轴和y轴移动时相互不干涉,保证了水平位移机构的稳定运行。
52.由于磁吸框为电磁铁,可在选择框移动至对应的单体回收箱上方时将电磁铁通电,该磁吸框与选择框磁吸连接;并且由于单体回收箱为非铁磁材料,电磁铁通电时,单体回收箱不会被吸引,选择框上升后,单体回收箱和磁吸框分离并拉伸编织物。
53.通过在单体回收箱侧壁上部设置光栅,可监测每个单体回收箱内的垃圾装载量,若单体回收箱装满,则向控制模块发出信号,提示清理该单体回收箱,减少了人工观察单体回收箱装载情况的工作量,提高了自动化程度。
54.本技术实施例中,图像采集模块采集垃圾的图像信息,并由图像识别模块进行分析,通过内置算法识别出垃圾种类后向控制模块发出信号,控制选择机构选择待投入垃圾对应的单体回收箱,识别过程自动化,不依赖人工,排除了人工分类错误的可能性,提高了垃圾分类回收的正确性;针对图像识别模块无法准确识别的垃圾或者使用者已知垃圾种类需要大量投入该种垃圾的情况,可在操作面板手动选择垃圾种类,控制选择机构选择正确的单体回收箱形成坡型通道,并打开开盖机构,将垃圾投入;语音模块可在每次识别出垃圾种类后进行该种垃圾种类的语音播报,对使用者进行垃圾分类知识宣传教育,并且在光栅识别到单体回收箱装满后,语音模块可语音播报具体哪个单体回收箱装满,提示使用者进行清理。
55.以上示意性地对本发明及其实施方式进行了描述,该描述没有限制性,附图所示的也只是本发明的实施方式之一,实际的结构并不局限与此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不创造性地设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1