一种兼具吸真空和破真空的气路控制系统及其控制方法与流程
1.本发明涉及真空控制技术领域,尤其是涉及一种兼具吸真空和破真空的气路控制系统及其控制方法。
背景技术:
2.吸真空回路是利用真空泵或真空发生器在管路内形成负压,该吸真空回路使得管路端部上的吸盘能够吸附物体,在自动化设备上完成对加工产品的上料和移料过程。破真空回路则是利用节流阀对管路内的真空环境进行破坏,在管路内形成正压,该破真空回路使得管路端部上的吸盘能够吹气而使得吸附的物体与吸盘之间可靠的分离,在自动化设备上完成对加工产品的下料过程。因此,现有的很多自动化组装设备中,都会利用到吸真空回路和破真空回路来完成对于加工产品的上下料以及移料操作。
3.如图1所示,为现有的加工设备中常用的一种气路控制系统100’的示意图。在该气路控制系统100’中,为了能够同时兼具吸真空回路和破真空回路,需要采用真空阀11’和破真空阀12’,这两个单独的电磁阀来进行管路的控制。如图2所示,为现有的加工设备中常用的另一种气路控制系统101’的示意图。在该气路控制系统101’中,为了能够同时兼具吸真空回路和破真空回路,需要采用真空发生阀13’和真空切换阀14’这两个单独的电磁阀进行管路的控制。由此可见,现有的气路控制系统(100’、101’)为了能够同时兼具吸真空回路和破真空回路,需要在气路系统中至少设置两个电磁阀用于控制两种不同的回路。现有的气路控制系统(100’、101’)至少两个电磁阀进行控制,不仅系统的制造成本高,气路控制系统的结构也相对复杂。
技术实现要素:
4.本发明的目的在于解决现有的气路控制系统为了能够同时兼具吸真空回路和破真空回路,需要在气路系统中同时设置至少两个电磁阀用于控制两种不同的回路所导致的系统制造成本高、气路控制系统的结构相对复杂的缺点,提供一种兼具吸真空和破真空的气路控制系统。
5.本发明解决其技术问题采用的技术方案是:一种兼具吸真空和破真空的气路控制系统,包括连通外部气源的汇流排、一个与所述汇流排连通的五通电磁阀、与所述五通电磁阀连通的真空发生器、节流阀以及通过第一接头与所述真空发生器或所述节流阀连通的末端执行器;所述五通电磁阀上设置有第一进气口、第二进气口、第三进气口、第一出气口和第二出气口,所述第一进气口上设置有用于封堵所述第一进气口的第一堵头,所述第二进气口设置有与所述汇流排连通的第一进气管路,所述第三进气口上设置有用于封堵所述第三进气口的第二堵头,所述第一出气口通过第二进气管路与所述第一接头连通,所述第二出气口通过第三进气管路与所述第一接头连通;所述汇流排设置有与所述第一进气管路的连通的排气口;所述真空发生器通过第二接头与所述第二进气管路连通;所述节流阀设置于所述第三进气管路上。
6.进一步地,所述第一接头包括与所述第二进气管路连通的第一接口、与所述第三进气管路连通的第二接口以及与所述末端执行器连通的第三接口。
7.进一步地,所述第二接头包括与所述五通电磁阀的第一出气口连通的第四接口、与所述真空发生器连通的第五接口以及与所述第二进气管路的第六接口。
8.进一步地,还包括通过第三接头与所述第二进气管路连通的用于测量真空度的真空压力开关。
9.具体地,所述第三接头包括与所述第二进气管路连通的第七接口、与所述第二进气管路连通的第八接口以及与所述真空压力开关连通的第九接口。
10.进一步地,所述汇流排上设置有l型接头,所述l型接头具有与所述汇流排连通的第十接口以及与所述外部气源连通的第十一接头。
11.本发明所提供的一种兼具吸真空和破真空的气路控制系统的有益效果在于:整个气路回路中仅设置有一个五通电磁阀,通过五通电磁阀配合两个堵头,实现吸真空回路和破真空回路之间的切换,相较于现有的间距吸真空和破真空的气路控制系统,在能够完成回路切换的前提下,减少了电磁阀的使用数量,降低了气路控制系统的制造成本,降低了气路控制系统所占用的资源以及气路控制系统的程序控制的复杂程度,整个气路控制系统不需要对两个电磁阀的自动控制,更加简单、可靠且易实现。
12.本发明还提供了一种兼具吸真空和破真空的气路控制方法,应用于上述的一种兼具吸真空和破真空的气路控制系统中,所述气路控制系统中的五通电磁阀为三位五通电磁阀;所述气路控制方法:当所述三位五通电磁阀未通电和/ 或所述三位五通电磁阀通电且所述三位五通电磁阀位于中位时,所述气路控制系统处于非工作状态,所述三位五通电磁阀的所述第一进气口、所述第二进气口、所述第三进气口、所述第一出气口和所述第二出气口均处于封闭状态;当所述三位五通电磁阀通电且所述三位五通电磁阀位于第一档位时,所述气路控制系统处于吸真空回路状态,所述三位五通电磁阀的所述第二进气口与所述第一出气口连通;当所述三位五通电磁阀通电且所述三位五通电磁阀位于第二档位时,所述气路控制系统处于破真空回路状态,所述三位五通电磁阀的所述第二进气口与所述第二出气口连通。
13.具体地,所述三位五通电磁阀为中封式三位五通电磁阀或中压式三位五通电磁阀。
14.本发明所提供的一种兼具吸真空和破真空的气路控制方法的有益效果在于:仅采用一个三位五通电磁阀,即可实现气路系统中吸真空和破真空两种不同气路的相互切换,利用三位中的中位以及断电状态实现非工作状态,通电时的左位为吸真空回路状态,通电时的右位为破真空回路状态,该控制方法简单,容易操作,方便实现,适用于各种标准化或非标准化自动化设备中使用,用于对于物料的拾取和放置,也可适用于需要真空发生功能或真空破坏功能的装置以及气控场合使用。
15.本发明还提供了一种兼具吸真空和破真空的气路控制方法,应用于上述的一种兼具吸真空和破真空的气路控制系统中,所述五通电磁阀为二位五通电磁阀;所述气路控制方法包括:当所述二位五通电磁阀未通电时,所述气路控制系统处于非工作状态,所述二位五通电磁阀的所述第一进气口、所述第二进气口、所述第三进气口、所述第一出气口和所述第二出气口均处于封闭状态;当所述二位五通电磁阀通电且所述二位五通电磁阀位于左位
时,所述气路控制系统处于吸真空回路状态,所述二位五通电磁阀的所述第二进气口与所述第一出气口连通;当所述二位五通电磁阀通电且所述二位五通电磁阀位于右位时,所述气路控制系统处于破真空回路状态,所述二位五通电磁阀的所述第二进气口与所述第二出气口连通。
16.本发明所提供的一种兼具吸真空和破真空的气路控制方法的有益效果在于:仅采用一个二位五通电磁阀,即可实现气路系统中吸真空和破真空两种不同气路的相互切换,利用二位五通电磁阀断电状态实现非工作状态,同时,利用二位五通电磁阀通电时的第一档位为吸真空回路状态,通电时的第二档位为破真空回路状态,该控制方法简单,容易操作,方便实现,适用于各种标准化或非标准化自动化设备中使用,用于对于物料的拾取和放置,也可适用于需要真空发生功能或真空破坏功能的装置以及气控场合使用。
附图说明
17.图1是现有技术的第一种气路系统所提供的一种兼具吸真空和破真空的气路控制系统的示意图;
18.图2是现有技术的第二种气路系统所提供的一种兼具吸真空和破真空的气路控制系统的示意图;
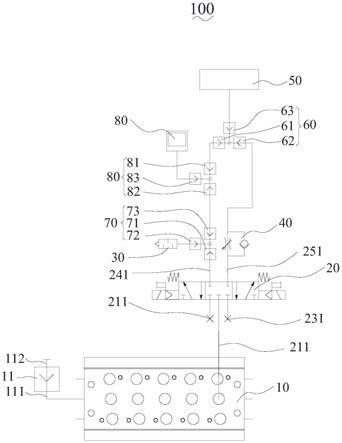
19.图3是本发明的第一实施例所提供的一种兼具吸真空和破真空的气路控制系统的示意图;
20.图4是本发明的第一实施例所提供的一种兼具吸真空和破真空的气路控制系统中三位五通电磁阀的示意图;
21.图5是本发明的第二实施例所提供的一种兼具吸真空和破真空的气路控制系统中二位五通电磁阀的示意图。
22.图中:100’、101
’‑
现有技术中兼具吸真空和破真空的气路控制系统;
23.11
’‑
真空阀、12
’‑
破真空阀;
24.13
’‑
真空发生阀、14
’‑
真空切换阀;
25.100
‑
一种兼具吸真空和破真空的气路控制系统;
26.10
‑
汇流排、11
‑
排气口、
27.12
‑
l型接头、121
‑
第十接口、122
‑
第十一接口;
28.20
‑
三位五通电磁阀、21
‑
第一进气口、211
‑
第一堵头、
29.22
‑
第二进气口、221
‑
第一进气管路、
30.23
‑
第三进气口、231
‑
第二堵头、
31.24
‑
第一出气口、241
‑
第二进气管路、
32.25
‑
第二出气口、251
‑
第三进气管路;
33.20
’‑
两位五通电磁阀、21
’‑
第一进气口、22
’‑
第二进气口、
34.23
’‑
第三进气口、24
’‑
第一出气口、25
’‑
第二出气口;
35.30
‑
真空发生器、40
‑
节流阀、50
‑
末端执行器、90
‑
真空压力开关;
36.60
‑
第一接头、61
‑
第一接口、62
‑
第二接口、63
‑
第三接口;
37.70
‑
第二接头、71
‑
第四接口、72
‑
第五接口、73
‑
第六接口;
38.80
‑
第三接头、81
‑
第七接口、82
‑
第八接口、83
‑
第九接口。
具体实施方式
39.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
40.实施例一:
41.参见图3
‑
图4,为本发明第一实施例所提供的一种兼具吸真空和破真空的气路控制系统100。本发明所提供的气路控制系统100可以应用于各种标准或非标准的自动化装置中使用,该气路控制系统100同时具备吸真空回路和破真空回路,利用其中的吸真空回路和破真空回路,实现对加工的物料进行拾取、放置以及移料操作。本发明所提供的气路控制系统100可以适用于各种需要吸真空发生功能和/或破真空功能的装置或气控场所使用,该气路控制系统100 中的资源以及程序控制简单,容易操作,易于实现。
42.进一步地,如图3所示,为本发明第一实施例中所提供一种兼具吸真空和破真空的气路控制系统100的示意图。本发明第一实施例中所提供一种兼具吸真空和破真空的气路控制系统100包括依次包括汇流排10、五通电磁阀20、真空发生器30、节流阀40、末端执行器50。其中汇流排10与自动化加工设备中的空气压缩机连通,从而将外部的气流通过空气压缩机压缩之后形成气源输入至汇流排10中,该气源为经过压缩后的空气。该压缩后的空气进过汇流排10 来到五通电磁阀20中,通过本发明所提供的五通电磁阀20实现两种不同回路的切换。
43.具体地,如图1所示,本发明所提供的气路控制系统100包括连通外部气源的汇流排10、一个与汇流排10连通的五通电磁阀20、与五通电磁阀20连通的真空发生器30、节流阀40以及通过第一接头60与真空发生器30或节流阀 40连通的末端执行器50。该汇流排10与五通电磁阀20连通,该五通电磁阀 20同时与真空发生器30和节流阀40连通,该真空发生器30和节流阀40又同时通过第一接头60与末端执行器50连通,从而形成了经过真空发生器30或经过节流阀40的两条气路。该两条气路分别为具有吸真吸附功能的吸真空回路和具有吹气功能的破真空回路,两个回路均通过该五通电磁阀20实现切换和控制。通过该五通电磁阀20中的切换实现两条不同的气路通道,其中一个气路通道上设置有真空发生器30,通过该真空发生器30对该气路通道内的压缩空气抽真空操作,并最终作用于气路通道末端的末端执行器50上,在气路通道内形成负压,利用该负压在末端执行器50的端面上形成吸附力,从而可以通过末端执行器50吸附加工物料;另一个气路通道上设置有节流阀40,通过该节流阀 40对该气路通道内的压缩空气进行破坏,并最终作用于气路通道末端的末端执行器50上,在气路通道内形成正压,利用该正压在末端执行器50的端面上形成向外流动的气流,并通过该气流将末端执行器50上所吸附的加工物料与末端执行器50分离。本发明所提供的气路控制系统100上所设置的末端执行器50 为真空吸盘等具有真空吸附功能的部件。
44.进一步地,如图4所示,为本发明所提供的五通电磁阀20的示意图。在本实施例中,该五通电磁阀20为三位五通电磁阀20。该三位五通电磁阀20上设置有第一进气口21、第二进气口22、第三进气口23、第一出气口24和第二出气口25。如图4所示,该三位五通电磁阀20上形成左位、中位和右位三种不同的档位。
45.具体地,如图4所示,该三位五通电磁阀20中的第一进气口21上设置有用于封堵第一进气口21的第一堵头211,并且第三进气口23上设置有用于封堵第三进气口23的第二堵
头231。该三位五通电磁阀20中的第一进气口21和第三进气口23分别通过两个堵头(211、231)封堵,使得该三位五通电磁阀 20无论是在通电或非通电状态下,均处于封闭的状态。
46.接着,该三位五通电磁阀20中的第二进气口22设置有与汇流排10连通的第一进气管路221,第一出气口24通过第二进气管路241与第一接头60连通,第二出气口25通过第三进气管路251与第一接头60连通。该三位五通电磁阀 20中的第一进气管路221与汇流排10连通,从而由汇流排10向着三位五通电磁阀20中不断的输送压缩空气。而该三位五通电磁阀20中的第一出气口24 通过第二进气管路241与第一接头60连通,第二出气口25通过第三进气管路 251与第一接头60连通,使得三位五通电磁阀20的出气方向上形成两条不同的回路,利用三位五通电磁阀20可以自由切换两条不同的气路,从而实现同一个气路控制系统100中的不同功能。
47.具体地,如图3所示,该汇流排10设置有与第一进气管路221的连通的排气口11;该排气口11设置于汇流排10的侧面,该排气口11与三位五通电磁阀20中第一进气管路221连通,从而由外部输入汇流排10上的压缩空气,将会由该排气口11统一输入至第一进气管路221中。
48.具体地,如图3所示,该真空发生器30通过第二接头70与第二进气管路 241连通;节流阀40设置于第三进气管路251上。通过三位五通电磁阀20的切换可以实现第二进气管路241和第三进气管路251两条不同管路上的分别出气。当三位五通电磁阀20控制由第一出气口24的第二进气管路241出气时,该压缩空气在经过第二进气管路241时会受到第二进气管路241上的真空发生器30的作用,在第二进气管路241上形成真空状态,并通过第一接头60与末端执行器50连通。当三位五通电磁阀20控制由第二出气口25的第三进气管路 251出气时,该压缩空气在经过第三进气管路251时会受到第三进气管路251 上的节流阀40的作用,在第三进气管路251上形成破真空的吹起状态,并通过第一接头60与末端执行器50连通。
49.进一步地,如图3所示,本发明所提供的气路控制系统100位于末端执行器50前端的第一接头60为三通接头,该三通接头将该末端执行器50分别与吸真空回路和破真空回路连通。该第一接头60包括与第二进气管路241连通的第一接口61、与第三进气管路251连通的第二接口62以及与末端执行器50连通的第三接口63。其中与第二进气管路241连通的第一接口61处于吸真空回路上,与第三进气管路251连通的第二接口62处于破真空回路上。
50.进一步地,如图3所示,本发明所提供的气路控制系统100位于第二进气管路241上的第二接头70用于将真空发生器30与吸真空回路连通。该第二接头70包括与五通电磁阀20的第一出气口24连通的第四接口71、与真空发生器30连通的第五接口72以及与第二进气管路241的第六接口73。其中该第四接口71与本实施例中的三位五通电磁阀20上的第一出气口24连通,从而由三位五通电磁阀20上输出的压缩气体将会经过第四接口71进入第二接头70中,并由第五接口72进入真空发生器30中,再从第六接口73回到第二进气管路 241中,整个进入第二进气管路241中的压缩空气将会通过真空发生器30的作用在管路和末端执行器50中形成真空环境。
51.进一步地,如图3所示,本发明所提供的气路控制系统100还包括通过第三接头80与第二进气管路241连通用于测量真空度的真空压力开关90。该真空压力开关90设置于吸真空回路的第二进气管路241上,可以对第二进气管路 241上的真空度进行实时监测,并且
对第二进气管路241上的设定值进行判断输出。
52.具体地,该第二进气管路241上在第二接头70和第一接头60之间,设置有第三接头80。该第三接头80包括与第二进气管路241连通的第七接口81、与第二进气管路241连通的第八接口82以及与真空压力开关90连通的第九接口83。其中,真空压力开关90与第九接口83连通,该第三接头30的第八接口82与第二进气管路241上的第二接口70的第六接头73连通,该第三接头 30的第七接口81与第二进气管路241的第一接口60的第一接口61连通。
53.进一步地,如图3所示,本发明所提供的气路控制系统100中的汇流排10 上设置有l型接头12,该l型接头12设置于汇流排10的进气口处,将外部的气源接入汇流排10中,l型接头12具有与汇流排10连通的第十接口121以及与外部气源连通的第十一接头122。该第十一接头122可以与自动化加工设备中的空气压缩机连通,将空气压缩机中的压缩空气通过l型接头12输入至汇流排10中,再由汇流排10输入至三位五通电磁阀20中。
54.本发明所提供的一种兼具吸真空和破真空的气路控制系统100的整个气路回路中仅设置有一个五通电磁阀20,通过五通电磁阀20配合两个堵头,实现吸真空回路和破真空回路之间的切换,相较于现有的间距吸真空和破真空的气路控制系统100,在能够完成回路切换的前提下,减少了电磁阀的使用数量,降低了气路控制系统100的制造成本,降低了气路控制系统100所占用的资源以及气路控制系统100的程序控制的复杂程度,整个气路控制系统100不需要对两个电磁阀的自动控制,更加简单、可靠且易实现。
55.本发明还提供了一种兼具吸真空和破真空的气路控制方法,应用于上述的一种兼具吸真空和破真空的气路控制系统100中。在本实施例中,如图4所示,该气路控制系统100中的五通电磁阀20为三位五通电磁阀20。
56.本发明第一实施例所提供的气路控制方法:
57.第一种工况下:
58.当三位五通电磁阀20未通电和/或三位五通电磁阀20通电且三位五通电磁阀20位于中位时,气路控制系统100处于非工作状态,三位五通电磁阀20的第一进气口21、第二进气口22、第三进气口23、第一出气口24和第二出气口 25均处于封闭状态。
59.如图4所示,当三位五通电磁阀20未通电时,其上的第一进气口21、第二进气口22、第三进气口23、第一出气口24和第二出气口25均处于封闭状态,因此整个气路控制系统100处于非工作状态。
60.如图4所示,当三位五通电磁阀20通电,且位于中位时,其上的第一进气口21被第一堵头211封闭,第三进气口23被第二堵头231封闭,而第二进气口22处于封闭的状态,导致第一出气口24和第二出气口25也同样处于封闭的状态,因此整个气路控制系统100处于非工作状态。
61.第二种工况下:
62.当三位五通电磁阀20通电且三位五通电磁阀20位于左位时,气路控制系统100处于吸真空回路状态,三位五通电磁阀20的第二进气口22与第一出气口24连通。
63.如图4所示,当三位五通电磁阀20通电时,其上的第一进气口21被第一堵头211封闭,第三进气口23被第二堵头231封闭,该三位五通电磁阀20位于左位,则第二进气口22与第一出气口24连通,此时,气体进入第二进气管路241中,整个第二进气管路241受到其上的真空发生器30的作用,形成吸真空回路。
64.第三种工况下:
65.当三位五通电磁阀20通电且三位五通电磁阀20位于右位时,气路控制系统100处于破真空回路状态,三位五通电磁阀20的第二进气口22与第二出气口25连通。
66.如图4所示,当三位五通电磁阀20通电时,其上的第一进气口21被第一堵头211封闭,第三进气口23被第二堵头231封闭,该三位五通电磁阀20位于右位,则第二进气口22与第二出气口25连通,此时,气体进入第三进气管路251中,整个第三进气管路251受到其上的节流阀40的作用,形成吸真空回路。
67.在本实施例中,该三位五通电磁阀20为中封式三位五通电磁阀或中压式三位五通电磁阀。
68.本发明所提供的一种兼具吸真空和破真空的气路控制方法中仅采用一个三位五通电磁阀20,即可实现气路系统中吸真空和破真空两种不同气路的相互切换,利用三位中的中位以及断电状态实现非工作状态,通电时的左位为吸真空回路状态,通电时的右位为破真空回路状态,该控制方法简单,容易操作,方便实现,适用于各种标准化或非标准化自动化设备中使用,用于对于物料的拾取和放置,也可适用于需要真空发生功能或真空破坏功能的装置以及气控场合使用。
69.实施例二:
70.本发明还提供了一种兼具吸真空和破真空的气路控制方法,应用于上述的一种兼具吸真空和破真空的气路控制系统100中。在本实施例中,如图5所示,该气路控制系统100中的五通电磁阀20’为两位五通电磁阀20。该两位五通电磁阀20仅仅具有第一档位和第二档位两种不同的工况。
71.本发明第二实施例所提供的气路控制方法包括:
72.第一种工况下:
73.当二位五通电磁阀20’未通电时,气路控制系统处于非工作状态,二位五通电磁阀20’的第一进气口21、第二进气口22、第三进气口23、第一出气口 24和第二出气口25均处于封闭状态。当本发明第二实施例所提供的二位五通电磁阀20’未通电时,该电磁阀处于封闭状态,对应的该气路控制系统处于非工作状态。
74.第二种工况下:
75.当二位五通电磁阀20’通电且二位五通电磁阀20’位于第一档位时,气路控制系统处于吸真空回路状态,二位五通电磁阀20’的第二进气口22与第一出气口24连通。
76.如图5所示,当二位五通电磁阀20’通电后,该二位五通电磁阀20’位于第一档位时,其上的第一进气口21’被第一堵头封闭,第三进气口23’被第二堵头封闭,则第二进气口22’与第一出气口24’连通,此时,气体进入第二进气管路中,整个第二进气管路受到其上的真空发生器的作用,形成吸真空回路。
77.第三种工况下:
78.当二位五通电磁阀20’通电且二位五通电磁阀20’位于右位时,气路控制系统处于破真空回路状态,二位五通电磁阀20’的第二进气口22与第二出气口25连通。
79.如图5所示,当二位五通电磁阀20’通电时,其上的第一进气口21’被第一堵头封闭,第三进气口23’被第二堵头封闭,该二位五通电磁阀20’位于第二档位时,则第二进气口22’与第二出气口25’连通,此时,气体进入第三进气管路中,整个第三进气管路受到其上的
节流阀的作用,形成吸真空回路。
80.本发明所提供的一种兼具吸真空和破真空的气路控制方法仅采用一个二位五通电磁阀20’,即可实现气路系统中吸真空和破真空两种不同气路的相互切换,利用二位五通电磁阀20’断电状态实现非工作状态,同时,利用二位五通电磁阀20’通电时的第一档位为吸真空回路状态,通电时的第二档位为破真空回路状态,该控制方法简单,容易操作,方便实现,适用于各种标准化或非标准化自动化设备中使用,用于对于物料的拾取和放置,也可适用于需要真空发生功能或真空破坏功能的装置以及气控场合使用。
81.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有1条留言
-
 0访客 来自[中国] 2022年06月06日 13:11表达不清,太乱
0访客 来自[中国] 2022年06月06日 13:11表达不清,太乱
1