一种集装箱码头的位置模式卸船方法与流程
1.本发明涉及集装箱码头装卸工艺技术领域,具体地讲是一种集装箱码头的位置模式卸船方法;适用于以内贸集装箱作业为主的自动化集装箱码头。
背景技术:
2.在港口竞争不断加剧,集装箱码头吞吐量不断攀升的背景下,优化作业工艺,提高作业效率已成为集装箱码头提升服务水平,增强核心竞争力的重要途径。
3.由于集装箱物流各环节的种种因素,来港船舶进口单证与船上集装箱的实际装载不完全一致,从而导致进口集装箱的计划船上位置与实际船上位置经常不相符。传统卸船方式,是以进口集装箱的箱号为基准来控制卸船作业流程,要求一次性将所有进口集装箱的作业指令全部发出,给后续的水平运输机械调度以及按实际船上位置确认作业指令带来很大不便。
技术实现要素:
4.本发明的目的是克服上述已有方法存在的不足,而提供一种集装箱码头的位置模式卸船方法。
5.本发明提供的技术方案是:一种集装箱码头的位置模式卸船方法,其特殊之处在于,包括如下步骤:a维护船舶信息,对于第一次挂靠码头的船舶,在集装箱码头tos系统中建立该船的船舶信息;b edi接收导入,将来港船舶的进口单证数据导入到集装箱码头tos系统里;c进口单证维护,将进口船图和进口舱单进行修改、核对、确认,生成进口集装箱的预约数据;d制订卸船计划,在集装箱码头tos系统中以图形化的方式制订卸船的作业计划,包括以下步骤:1)根据待卸船集装箱的数量以及船期要求,给船舶分配若干岸桥;2)基于进口集装箱的预约数据,对船上的每一贝集装箱生成一个作业队列,每个作业队列包含一组作业动作,一个作业动作对应一个集装箱的卸船任务;3)根据进口集装箱在船上的分布情况,将作业队列分配给各岸桥;4)根据岸桥所分配作业队列的作业动作的数量,给每个岸桥分配若干拖车或智能导引车igv;e作业指令发送,卸船开工后,对作业动作进行激活操作,即产生对应的作业指令,供水平运输机械执行;按批发送作业指令,每一批次的指令数量根据岸桥所分配拖车或智能导引车igv的数量来决定,待所有已发送指令确认后,再发送下一批次作业指令;f水平运输机械调度,集装箱码头tos系统自动进行水平运输机械调度处理,给已发送的一条作业指令指派拖车或智能导引车igv,到岸桥下进行卸船作业;
g作业指令确认,岸桥将集装箱从船上卸到拖车或智能导引车igv时,集装箱码头tos系统收到自动化设备反馈的作业完成信号和实际箱号,将实际箱号覆盖作业动作里的计划箱号,完成作业指令的确认;h作业指令确认后,释放对应的拖车或智能导引车igv,再次进入水平运输机械调度;i待所有已发送指令都确认后,再次进行作业指令发送;循环进行e,f,g步骤,直到完成全部集装箱的卸船作业。
6.进一步的,a步骤所述的船舶信息包括船舶的船期信息和船舶结构。
7.进一步的,b步骤所述的进口单证数据包括进口船图和进口舱单。
8.进一步的,d步骤所述的作业队列为船上一个贝的集装箱的卸船任务;所述的作业动作为一个集装箱的卸船任务。
9.进一步的,d步骤所述的作业动作包含以下作业数据:1)queue_id:作业队列id;2)seq_no:作业序号;3)unit_no:集装箱箱号,即计划箱号或实际箱号;4)move_state:作业状态;5)from_position:起点位置;6)truck_no:水平运输机械编号,即拖车或igv的机械编号;7)to_position:终点位置。
10.进一步的,所述的作业状态move_state包括:1)plan:计划;2)sent:已发送;3)dispatch:已派车;4)ontruck:在车;5)finish:完成。
11.进一步的,e步骤所述的作业指令与作业动作的对应方式为:通过船上的作业位置与作业动作的起点位置相对应,而不是将作业集装箱的实际箱号与作业动作的计划箱号相对应。
12.进一步的,e步骤所述的作业指令发送是指在岸桥的当前作业贝,根据集装箱在船上的位置,按从上到下的顺序,依次发送各集装箱的作业指令,作业指令的箱号是从作业动作里取的计划箱号,且计划箱号不准确。
13.本发明的有益效果:1、本发明打破传统的以箱号为基准的集装箱卸船作业模式,解决了集装箱码头tos系统的进口集装箱预约数据与船上集装箱的实际装载不一致的客观难题,尤其适用于以内贸集装箱作业为主的自动化集装箱码头;2、在来港船舶进口单证与船上集装箱的实际装载不相符的情况下,创新地以进口集装箱在船上的位置为索引,进行卸船作业的控制和确认流程,极大方便了作业中的水平运输机械调度和作业指令确认,从而减少了卸船作业的人为干预,缩短船舶的在港停泊时间,提高岸桥的作业效率和服务质量。
附图说明
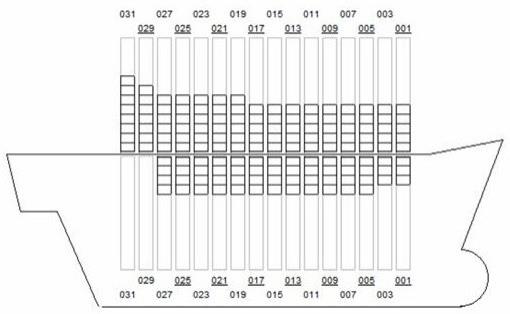
14.图1是本发明的集装箱船舶侧视图;图2是本发明的集装箱船舶贝图;图3是本发明的集装箱计划装载示意图;图4是本发明的集装箱实际装载示意图。
具体实施方式
15.为了更好地理解与实施,下面结合附图详细说明本发明。
16.如图1、2、3、4所示,一种集装箱码头的位置模式卸船方法,以广州港南沙四期集装箱码头的卸船作业为例,具体步骤如下:1、维护船舶信息在集装箱码头tos系统中建立来港船舶船舶信息,船舶信息包括船舶的船期信息和船舶结构,定义的船舶结构包括船舶的侧视图和每个贝的贝图,如图1、2所示;2、edi接收导入接收船公司或船舶代理发来的edi报文,将进口单证(包括进口船图和进口舱单),即来港船舶在本码头卸船的计划数据,导入到集装箱码头tos系统;3、进口单证维护在集装箱码头tos系统中将进口船图和进口舱单的数据进行修改、核对、确认,生成进口集装箱相对准确的预约数据;4、制订卸船计划在集装箱码头tos系统中按以下顺序分步制订卸船的作业计划:1)根据进口集装箱的数量和船期要求,给船舶分配若干岸桥;例如一艘来港船舶计划在本码头卸3000个自然箱,要求15小时内完成卸船,按照岸桥的平均作业效率(40自然箱/小时)计算,则至少需要分配5台岸桥;2)基于进口集装箱的预约数据,对船舶的每一贝生成卸船的作业队列;具体的,如图1所示,该船舶有16个贝,编号分别为001、003、005、
……
、029、031;如图2所示,每个贝以甲板为界,又分为舱上/舱下两个分贝,这样,该船舶一共有32个分贝;在tos系统中以图形化的方式在船舶侧视图拖拉鼠标,为每一个分贝生成作业队列(work_queue),每个work_queue有唯一的queue_id,包含一组作业动作(work_move);每个work_move对应一个待卸船的集装箱,包含了该集装箱的作业数据;此时,work_move的作业状态为plan;作业动作包含以下作业数据:(1)queue_id:作业队列id,(2)seq_no:作业序号,(3)unit_no:集装箱箱号,即计划箱号或实际箱号,(4)move_state:作业状态,(5)from_position:起点位置,(6)truck_no:水平运输机械编号,即拖车或igv的机械编号,(7)to_position:终点位置;作业状态move_state包括:
(1)plan:计划,(2)sent:已发送,(3)dispatch:已派车,(4)ontruck:在车,(5)finish:完成;3)根据进口集装箱在船上的分布情况,按作业均衡原则,将生成的32个work_queue分配给5个岸桥;由于各work_queue包含的work_move(即待卸船集装箱)有多有少,故每个岸桥所分配work_queue的个数不一,一般在5到7之间;将岸桥号记录在所分配的每一个work_queue里,这样每个work_move就可以根据所属的work_queue来确定负责其作业的岸桥;4)将一个岸桥负责的作业设为一个作业线,给每个作业线分配一定数量的igv,组成作业车队,负责作业线的水平运输(从岸边拖集装箱到堆场,再从堆场回到岸边,循环往复),本例中,一个作业线所分配的igv为6辆;5、作业指令发送卸船开工后,由码头中控员在tos系统中进行指令发送,卸船作业正式开始;在岸桥的当前作业贝,根据进口集装箱在船上的实际装载,按从上到下的顺序,分批次发送集装箱卸船的作业指令,每次发送的作业指令数不大于作业线所分配igv数量的两倍;如图3所示,这是一个舱上分贝的集装箱计划装载示意图,为表述简便,用数字1到34给船上位置编号,即作业位置;用字母a到j给最上面10个集装箱编号,即计划箱号;将这10个集装箱的作业指令发出,而不是将整个分贝集装箱的作业指令全部发出,以减小igv的调度规模和处理难度;此时,work_move的作业状态为sent,虽然作业指令的箱号是从work_move获得的计划箱号,可能与实际卸船集装箱的箱号不符,但后续的igv调度和作业指令确认都是按照船上位置(from_position)来找对应的work_move,故没有影响;6、水平运输机械调度tos系统自动进行水平运输机械的调度处理,给已发送的一条作业指令指派智能导引车igv,到岸桥下进行卸船作业;7、作业指令确认岸桥将集装箱从船上卸到igv后,tos系统根据实际作业的船上位置,按照from_position找到匹配的work_move,自动确认对应的作业指令,并将实际箱号覆盖work_move里的计划箱号;如图3、4所示,在3号位置,计划箱号是c,实际卸船的集装箱是e,同样的,在5号、7号位置也有计划箱号与实际卸船的集装箱不符的情况,在指令确认时依次修正;此时,work_move的作业状态变为ontruck,从而完成一个集装箱的岸边卸船作业;8、作业指令确认后,释放对应的智能导引车igv,再次进行水平运输机械调度;由于作业线所分配的igv是6辆,而发送了10个集装箱的作业指令,假定作业的都是40英尺大箱,则一辆igv只能接卸一个集装箱,那么将有6个作业指令指派了igv,对应work_move的作业状态变为dispatch,剩下的4个作业指令等待igv释放后,才能参与机械调度;9、待所有已发送指令都确认后,发送下一批次的集装箱的作业指令;循环进行5,6,7步骤,直到完成全部集装箱的卸船作业。
17.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施方
式,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1