夹持装置以及夹持目标对象的方法与流程
1.本公开涉及一种夹持装置以及夹持目标对象的方法。
背景技术:
2.在物流业中,经常需对对象进行提取与夹持,以对对象进行移动、搬运等作业。然而,传统物流业的工作环境缺少适当的自动化设备进行对象的自动化夹取及搬运,因而需要大量的人力进行操作。然而,若以人力搬运,当对象的尺寸越大,则容易造成对搬运人员的职业伤害,还可能发生对象掉落的危险,造成搬运人员的安全上的疑虑或因对象损坏所造成的成本损失,进而降低物流效率,增加人为毁损对象以及降低产品质量的可能性。
3.公开内容
4.本公开是针对一种夹持装置及方法,其可实现对对象的自动化夹持及搬运,进而提升物流效率。
5.根据本公开的实施例,本公开的一种夹持装置包括夹具本体、真空泵以及多个吸盘模块。夹具本体包括承靠部以及连接于所述承靠部的第一端的固定部,所述固定部与所述承靠部之间夹角度,并用于分别承靠目标对象的相邻两表面。真空泵设置于所述夹具本体上,并经配置以提供真空吸力。多个吸盘模块,分别设置于所述承靠部以及所述固定部上,并耦接所述真空泵,以利用所述吸力吸引及固定所述目标对象的所述相邻两表面。
6.根据本公开的实施例,本公开的一种夹持目标对象的方法包括下列步骤。感测多个物件至基准点的多个距离。依据所述多个距离决定所述多个对象中的目标对象。将夹具本体移动至所述目标对象的位置。利用所述夹具本体上的吸盘模块提供吸力以吸引及固定所述目标对象的相邻两表面。移动固定所述目标对象的所述夹具本体至目标位置。放下所述目标对象。
7.基于上述,本公开的夹持装置及方法先是利用吸盘模块吸引及固定目标对象,再利用致动机构驱动夹爪进行伸缩及旋转,以将夹爪驱动至适当的夹持位置以对目标对象进行夹持。因此,本公开的夹持装置及方法可使目标对象的夹持与搬运自动化,进而可有效提升夹持与搬运目标对象的效率。
附图说明
8.包含附图以便进一步理解本公开,且附图并入本说明书中并构成本说明书的一部分。附图说明本公开的实施例,并与描述一起用于解释本公开的原理。
9.图1是依照本公开的一实施例的一种夹持装置的使用情境示意图;
10.图2是依照本公开的一实施例的一种夹持装置的立体示意图;
11.图3是图2的一种夹持装置的另一角度的立体示意图;
12.图4是依照本公开的一实施例的一种夹持装置的夹爪在收纳位置时的示意图;
13.图5是依照本公开的一实施例的一种夹持装置的夹爪在夹持位置时的示意图;
14.图6是依照本公开的一实施例的一种夹持装置的另一视角的示意图;
15.图7是依照本公开的一实施例的一种夹爪模块的部分组件爆炸示意图;
16.图8是依照本公开的一实施例的一种夹爪模块的部分组件组装示意图;
17.图9是依照本公开的一实施例的一种吸盘模块的示意图;
18.图10是依照本公开的一实施例的一种夹持装置的使用情境的示意图;
19.图11是依照本公开的一实施例的一种夹持目标对象的方法的方块流程示意图。
20.附图标记说明
21.10:夹持装置
22.100:夹持模块
23.20:物件
24.22:目标对象
25.110:夹具本体
26.112:固定部
27.114:承靠部
28.120:吸盘模块
29.122:缓冲层
30.1221:气孔
31.124:密闭腔体
32.126:真空泵
33.130:夹爪模块
34.132:夹爪
35.1321:驱动车由
36.1322:转向螺纹
37.1322a:直向部
38.1322b:转向部
39.134:致动机构
40.1341:套管
41.1342:凸点
42.1343:气缸
43.1344:枢接头
44.200:机械手臂
45.210:底座
46.300:传感模块
47.400:处理器
48.d1:移动方向
49.d2:升降方向
50.e1:第一端
51.e2:第二端
52.r1:旋转方向
具体实施方式
53.现将详细地参考本公开的示范性实施例,示范性实施例的实例说明于附图中。只要有可能,相同组件符号在附图和描述中用来表示相同或相似部分。
54.有关本公开的上述及其他技术内容、特点与功效,在以下配合参考附图的各实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的方向用语,例如:“上”、“下”、“前”、“后”、“左”、“右”等,是参考附图的方向。因此,使用的方向用语是用来说明,而并非用来限制本公开。并且,在下列各实施例中,相同或相似的组件将采用相同或相似的标号。
55.图1是依照本公开的一实施例的一种夹持装置的示意图。请先参照图1,本公开的夹持装置10可经配置以将多个对象由初始位置夹持并搬运至目标位置,也就是说,夹持装置10可应用于任何工作环境中多个对象的自动化装载及/或卸除。在某些实施例中,夹持装置10可包括夹持模块100、机械手臂200、传感模块300以及耦接夹持模块100、机械手臂200以及传感模块300的处理器400。夹持模块100可设置于机械手臂200的一端,在某些实施例中,夹持模块100可视为机械手臂200的一种末端效应器(end effector),用于夹持目标对象22。夹持模块100附接至机械手臂300的末端以通过机械手臂300往返于初始位置与目标位置之间,以搬运夹持于夹持模块100上的目标对象22。传感模块300可例如设置于机械手臂300的底座前方,以感测所述传感模块300至目标对象22的距离。
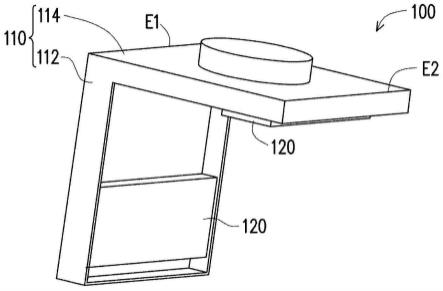
56.图2是依照本公开的一实施例的一种夹持装置的立体示意图。图3是图2的一种夹持装置的另一角度的立体示意图。请同时参照图2及图3,在某些实施例中,夹持模块100可包括夹具本体110、多个吸盘模块120以及真空泵126。夹具本体110包括固定部112以及承靠部114,在某些实施中,固定部112连接于承靠部114的第一端e1并与承靠部114之间相夹角度(例如直角),如此配置,固定部112与承靠部114可用于分别承靠(接触)目标对象22的相邻两表面(例如侧表面以及上表面)。在本实施例中,固定部112可为垂直构件,也就是说固定部112的主表面沿垂直方向延伸,以抵靠目标对象22的垂直(竖直)表面(例如侧表面)。承靠部114则可为水平构件,也就是说承靠部114的主表面沿水平方向延伸,以抵靠目标对象22中相邻于垂直表面的水平表面(例如上表面)。
57.在某些实施例中,真空泵126耦接夹具本体110并经配置以提供真空吸力。多个吸盘模块120分别设置于承靠部114以及固定部112上,并耦接真空泵126以利用真空泵126所提供的真空吸力吸引及固定目标对象22的相邻两表面(例如侧表面以及上表面)。在本实施例中,承靠部114的内表面(即面向目标对象22的表面)设置有两个吸盘模块120,而固定部112的内表面则设置有一个吸盘模块。当然,本公开并不以此为限,固定部112以及承靠部114可依实际产品需求(例如吸力需求)分别设置有更多或更少的吸盘模块120。在本实施例中,夹持模块100经控制以通过机械手臂移动至目标对象22的位置附近后,设置于固定部112及承靠部114上的吸盘模块120可利用吸力以吸取目标对象22,使目标对象22可例如横向移动至抵靠于固定部112及承靠部114上,因而使目标对象22与其他的对象20分离,以便于后续对目标对象22进行夹取。在本实施例中,真空泵126/吸盘模块120所提供的吸力约可大于或大体上等于498牛顿以上,其可用于吸取约30至35公斤左右的目标对象。但本实施例并不以此为限。
58.图4是依照本公开的一实施例的一种夹持装置的夹爪在收纳位置时的示意图。图5是依照本公开的一实施例的一种夹持装置的夹爪在夹持位置时的示意图。在某些实施例
中,夹持装置100还可包括夹爪模块130。举例而言,夹爪模块130可包括可旋转的夹爪132以及致动机构134。在本实施例中,致动机构134可设置于承靠部114上。举例而言,致动机构134可例如设置于承靠部114的下表面。夹爪132则可经由致动机构134而设置于承靠部114上。具体而言,夹爪132可位于承靠部114的第二端e2,其相对于连接固定部112的第一端e1。致动机构134经配置以驱动夹爪132相对承靠部114旋转于如图4所示的收纳位置以及如图5所示的夹持位置之间。在某些实施例中,当夹持装置100需拾取的目标对象22的重量约大于预设重量(例如大于真空泵126/吸盘模块120所提供的吸力)时,夹持装置100便可启动夹爪模块130对目标对象22进行夹持及固定。
59.图6是依照本公开的一实施例的一种夹持装置的另一视角的示意图。图7是依照本公开的一实施例的一种夹爪模块的部分组件爆炸示意图。图8是依照本公开的一实施例的一种夹爪模块的部分组件组装示意图。请同时参照图6至图7,在某些实施例中,致动机构134可包括驱动轴1321、套管1341、气缸1343以及枢接头1344。驱动轴1321连接夹爪132,套管1341则套设于驱动轴1321上。驱动轴1321具有转向螺纹1322,其可如图7所示至少环绕驱动轴1321的部分外径,相应地,套管1341的内表面具有凸出于此内表面的凸点1342,其与转向螺纹1322结构配合。具体而言,凸点1342滑动设置于转向螺纹1322上,以沿着转向螺纹1322的方向滑动于转向螺纹1322内。在这样的结构配置下,当驱动轴1321受驱动而沿移动方向d1相对套管1341移动时,套管1341的凸点1342沿着转向螺纹1322滑动因而驱使驱动轴1321沿旋转方向r1旋转,进而带动夹爪132旋转于收纳位置以及夹持位置之间。
60.在某些实施例中,气缸1343耦接驱动轴1321,以驱动所述驱动轴1321沿移动方向d1移动,枢接头1344则可连接于气缸1343与驱动轴1321之间,以使驱动轴1321适于通过枢接头1344而相对气缸1343旋转。在本实施例中,枢接头可包括万向接头或其他适于旋转的接头等。一般而言,气缸1343内可设置有活塞,其是在气缸1343内滑动的圆柱,活塞的外径约等于气缸1343的内径,其通常以甚高的速度在气缸1343中往复运动,而与气缸壁之间快速地相对运动摩擦,功能是改变气缸1343包围的容积,或是传递气缸1343内流体所施加的压力。如此配置,气缸1343所产生的压力可用于驱动所述驱动轴1321沿远离或靠近固定部112的移动方向d1移动于伸长位置以及如图5所示的收缩位置之间。
61.在本实施例中,转向螺纹1322可包括彼此连接的直向部1322a以及转向部1322b。具体而言,直向部1322a可为平行于移动方向d1的直线沟槽,而转向部1322b则为连接直线沟槽的弧形沟槽。当气缸1343推动驱动轴1321沿移动方向d1移动时,套管1341的凸点1342沿着直向部1322a滑动因而驱使驱动轴1321沿直向部1322a的方向(即,移动方向d1)移动,进而带动夹爪132往前伸长或往后收缩。接着,凸点1342继续沿着直向部1322a滑动至转向部1322b,因而驱使驱动轴1321沿转向部1322b的方向进行转向,进而带动夹爪132旋转。
62.在本实施例中,夹爪132可呈l形,但本实施例并不局限于此,任何可用于夹持对象的形状皆为本公开所欲保护的范围。在本实施例中,夹爪模块130的数量可为多个。举例而言,夹爪模块130的数量可为两个,其可通过同样的配置而同时或依序沿移动方向d1移动于伸长位置与收缩位置之间,并可同时或依序旋转于收纳位置以及夹持位置之间。
63.图9是依照本公开的一实施例的一种吸盘模块的示意图。请同时参照图4以及图9,在某些实施例中,吸盘模块120可包括密闭腔体124以及缓冲层122。缓冲层122可设置于固定部112上且覆盖密闭腔体124。缓冲层122可包括多个延伸通过缓冲层122并与密闭腔体
124流体连通的多个气孔1221。在本实施例中,真空泵126耦接吸盘模块120以提供吸力。密闭腔体124可经由真空管连接至真空泵126。如此配置,当真空泵126启动时,密闭腔体124里的空气被瞬间抽走而产生吸力吸引目标对象往吸盘模块120移动,当目标对象受吸力吸引而抵靠于固定部112上时,目标对象将缓冲层122的气孔1221堵住,且气孔密闭腔体124里的空气持续被抽走因而呈现真空状态,因而可将目标对象吸牢于吸盘模块120上。在某些实施例中,缓冲层122包括海绵、滤网、橡胶或其任意组合。吸盘模块120可利用缓冲层122具有柔软和密封的特性,可随对象的不同外形而改变形状,因此,缓冲层122与对象的接触面能达到最佳效果,不管是板材、箱体或其他不规则的接触面皆能被吸住。
64.图10是依照本公开的一实施例的一种夹持装置的使用情境的示意图。请同时参照图1及图10,在某些实施例中,上述的夹持模块100可设置于机械手臂200上,进一步而言,机械手臂200可连接夹持模块100的夹具本体110,以经控制而移动夹持模块100至目标对象22的位置。在某些实施例中,传感模块300可升降地设置于机械手臂200的底座210的前方,并经配置以感测所述传感模块300至目标对象22的距离。在本实施例中,传感模块300可包括光学雷达(lidar)。一般而言,光学雷达是一种光学遥感技术,其是通过向目标对象照射一束光,通常是一束脉冲激光并通过测量发送及接收到的脉冲信号的时间间隔来计算目标对象的距离。
65.一般而言,夹持装置通常是利用设置于对象上方的影像传感模块来感测其距离,然而,此种做法容易因为最顶层的对象与最底层的对象的垂直距离差距过大而导致影像传感模块的感测结果出现失误(例如垂直距离差距大于影像传感模块的变焦范围)。本实施例是利用光学雷达作为传感模块300,且传感模块300是与目标对象22设置于同平面,以测量传感模块300与目标对象22之间的水平向距离,因而可避免上述问题,并可提升其对距离感测的准确率。如此,处理器400即可依据传感模块300所感测到的距离来决定目标对象22,并可控制机械手臂200移动夹持模块100至目标对象22的位置。在本实施例中,处理器400可包括计算机,其可包括或耦接可编程设计逻辑控制器(programmable logic controller,简称plc)或其他适合类型的控制器。
66.图11是依照本公开的一实施例的一种夹持目标对象的方法的方块流程示意图。请同时参照图1、图2及图11,在某些实施例中,利用上述的夹持装置10夹持目标对象22的方法可包括下列步骤。首先,执行步骤s110,利用传感模块300感测多个对象20至基准点的多个距离。举例而言,多个待搬运的对象20可如图1所示的彼此叠层,传感模块300可例如沿着升降方向d2可升降地扫描多个对象20,以得到多个对象20分别至基准点(例如传感模块300的位置)的多个距离。
67.接着,执行步骤s120,处理器400依据传感模块300所感测到的多个距离来决定多个对象(物件)20中的目标对象22。举例而言,若传感模块300所感测到的多个距离皆相同,代表面向传感模块300的多个对象尚未被搬运过,则处理器400可决定目标对象22为最顶层的对象20中的任一个。若传感模块300所感测到的多个距离有所不同,则代表面向传感模块300的多个对象已被搬运过,并且,具有较大距离的对象代表了此对象前方的对象已被搬空,因此,处理器400可决定目标对象22为此具有较大距离的对象,以使夹持装置10可依序夹取及搬运对象。当然,上述实施例为举例说明,处理器400可依其他适合的规则来安排对象的夹取及搬运顺序。
68.接着,执行步骤s130,机械手臂200经控制以将夹持模块100(包括夹具本体110)移动至目标对象22的位置。在某些实施例中,处理器400决定目标对象22之后,便可控制机械手臂200将夹持模块100移动至目标对象22的位置。更具体而言,夹持模块100可移动至与目标对象22实际的位置附近(例如间隔预设距离)。
69.接着,执行步骤s140,利用夹具本体110上的吸盘模块120提供吸力以吸引及固定目标对象22。在某些实施例中,在夹持模块100移动至目标对象22的位置附近时,处理器400可启动真空泵126,并通过真空泵126/吸盘模块120提供吸力以吸取目标对象22,使目标对象22可例如横向移动至抵靠于夹具本体110上,因而使目标对象22与其他的对象20分离,以便于夹爪132对目标对象22进行吸取。
70.接着,执行步骤s150,移动夹持目标对象22的夹持模块100至欲搬运的目标位置。在某些实施例中,处理器400可进行坐标转换,将多个对象在初始位置的坐标转换为目标位置的坐标系,以得到目标对象22所欲搬运的目标位置的坐标,并控制机械手臂200将夹持目标对象22的夹持模块100搬运至此目标位置。
71.之后,执行步骤s160,放下目标对象22,即完成目标对象22的夹持及搬运。在某些实施例中,放下目标对象22的方法可包括利用致动机构134驱动夹爪132沿远离夹具本体110的方向移动,以松开及释放目标对象22,之后再使夹爪132相对夹具本体110旋转至收纳位置。在某些实施例中,若目标对象22并非第一个搬运的对象,也就是说,在目标位置已有被搬运过的其他的对象时,夹持模块100可先将目标对象22移动至实际目标位置的附近(例如间隔预设距离),以便抽离夹持模块100。并在放下目标对象22且收回夹爪132之后,再利用夹具本体110推动目标对象22(例如利用吸盘模块120的吸力来推动目标对象22)至实际的目标位置(例如与邻近的对象接触的位置)。至此,即可算是完成一次目标对象22的夹持及搬运。接着,可重复执行上述步骤直至所有的对象20皆搬运至目标位置为止。
72.在某些实施例中,当所述目标对象的重量约大于预设重量(例如大于真空泵126/吸盘模块120所提供的吸力)时,夹持装置100可启动夹爪模块130对目标对象22进行夹持及固定。请同时参照图j及图6,启动夹爪模块130的方法可包括下列步骤。首先,驱动夹具本体110上的夹爪132沿远离夹具本体110的移动方向d1移动,并使夹爪132相对夹具本体110旋转至如图5所示的夹持位置。在某些实施例中,夹持模块100可如前所述地利用致动机构134的驱动而使夹爪132沿远离夹具本体110的方向移动,以使夹具本体110的固定部112至夹爪132距离约大于目标对象22的厚度,以使目标对象22可容纳于夹具本体110的固定部112与夹爪132之间,再利用致动机构134的驱动而使夹爪132相对夹具本体110旋转至夹持位置,以对容纳于夹具本体110的固定部112与夹爪132之间目标对象22进行夹取。
73.接着,驱动夹具本体110上的夹爪132沿靠近夹具本体110的方向移动以夹持目标对象22。在某些实施例中,夹持模块100可再利用致动机构134驱动夹爪132沿靠近夹具本体110的方向移动,直到夹爪132抵靠目标对象22为止,以使夹爪132可与夹具本体110共同夹持目标对象22。
74.综上所述,本公开的夹持装置及方法先是利用吸盘模块吸引及固定目标对象,再利用致动机构驱动夹爪进行伸缩及旋转,以将夹爪驱动至适当的夹持位置以对目标对象进行夹持。因此,本公开的夹持装置及方法可使目标对象的夹持与搬运自动化,进而可有效提升夹持与搬运目标对象的效率。
75.此外,本公开的夹持装置及方法是利用光学雷达作为传感模块,且传感模块是与目标对象设置于同平面,以测量传感模块与目标对象之间的水平向距离,因而可提升其对距离感测的准确率。如此,处理器即可依据传感模块所感测到的距离来决定目标对象,并可控制机械手臂移动夹持模块至目标对象的位置,因而可实现夹持与搬运目标对象全面自动化的效果。
76.最后应说明的是:以上各实施例仅用于说明本公开的技术方案,而非对其限制;尽管参照前述各实施例对本公开进行了详细的说明,本领域的技术人员应当理解:其依然可以对上述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本公开各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1