一种自移机尾的迈步控制方法、装置及电子设备与流程
1.本技术涉及采煤机械技术领域,尤其涉及一种自移机尾的迈步控制方法、装置及电子设备。
背景技术:
2.带式输送机用自移机尾与带式转载机一起,用于全断面煤巷快速掘进工作面的煤炭转运,其中自移机尾与转载机及超前支架配合使用,可完成转载机快速推移。这样一来,保证自移机尾在运行过程中的准确性,进而保证作业的安全性以及作业效率,正逐渐成为研究的主要方向之一。
3.然而,相关技术中,对于自移机尾的迈步控制这一问题,尚未存在高效且可靠性高的控制方法。由此,如何有效地提高自移机尾的迈步控制过程中的有效性、可靠性和准确性,已经成为了亟待解决的问题。
技术实现要素:
4.本技术旨在至少在一定程度上解决相关技术中的技术问题之一。
5.为此,本技术的第一个目的在于提出一种自移机尾的迈步控制方法,用于解决现有技术中存在的无法提高自移机尾的迈步控制过程中的有效性、可靠性和准确性的技术问题。
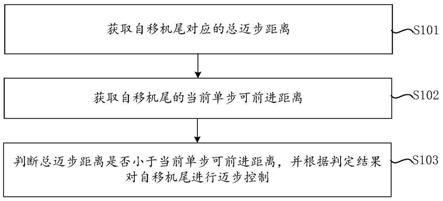
6.为了实现上述目的,本技术第一方面实施例提供了一种自移机尾的迈步控制方法,该方法包括:获取自移机尾对应的总迈步距离;获取所述自移机尾的当前单步可前进距离;判断所述总迈步距离是否小于所述当前单步可前进距离,并根据判定结果对所述自移机尾进行迈步控制。
7.另外,根据本技术上述实施例的一种自移机尾的迈步控制方法,还可以具有如下附加的技术特征:
8.根据本技术的一个实施例,所述获取所述自移机尾的当前单步可前进距离,包括:获取所述自移机尾的第一推移油缸的第一初始位置,以及第二推移油缸的第二初始位置;根据所述第一初始位置和所述第二初始位置,获取所述当前单步可前进距离。
9.根据本技术的一个实施例,还包括:响应于所述总迈步距离大于或者等于所述当前单步可前进距离,则控制两个所述推移油缸均按照预设迈步距离进行迈步;获取所述自移机尾的剩余迈步距离,并重新获取所述自移机尾的所述当前单步可前进距离;判断所述剩余迈步距离是否小于重新获取的所述当前单步可前进距离,并根据判定结果继续对所述自移机尾进行迈步控制。
10.根据本技术的一个实施例,所述根据判定结果继续对所述自移机尾进行迈步控制,包括:响应于所述剩余迈步距离小于重新获取的所述当前单步可前进距离,则控制两个所述推移油缸均按照所述剩余迈步距离进行所述最后一个迈步循环。
11.根据本技术的一个实施例,还包括:响应于所述剩余迈步距离大于或者等于重新
获取的所述当前单步可前进距离,则控制两个所述推移油缸均按照所述预设迈步距离进行迈步;返回所述获取所述自移机尾的剩余迈步距离,并重新获取所述自移机尾的所述当前单步可前进距离步骤,直至所述剩余迈步距离小于重新获取的所述当前单步可前进距离,控制两个所述推移油缸均按照所述剩余迈步距离进行所述最后一个迈步循环。
12.根据本技术的一个实施例,所述进行所述最后一个迈步循环之前,还包括:获取所述第一推移油缸和所述第二推移油缸的电磁阀控制方式;响应于所述电磁阀控制方式为第一电磁阀控制方式,则对两个所述推移油缸进行独立控制;
13.响应于所述电磁阀控制方式为第二电磁阀控制方式,则获取预设顺序,并根据所述预设顺序对两个所述推移油缸进行联合控制。
14.本技术公开了一种自移机尾的迈步控制方法、装置及电子设备,该方法包括:获取自移机尾对应的总迈步距离,并获取自移机尾的当前单步可前进距离,然后判断总迈步距离是否小于当前单步可前进距离,最后,定结果对自移机尾进行迈步控制。由此,本技术可以实现自移机尾前进任意迈步距离,并在完成设定迈步距离后,自动停止前进,实现自移机尾与搭接设备可弯曲胶带机任意长度的自动搭接,提高了自移机尾迈步过程中的高效性,准确性以及可靠性。
15.为了实现上述目的,本技术第二方面实施例提供了一种自移机尾的迈步控制装置,该装置包括:第一获取模块,用于获取自移机尾对应的总迈步距离;第二获取模块,用于获取所述自移机尾的当前单步可前进距离;控制模块,用于判断所述总迈步距离是否小于所述当前单步可前进距离,并根据判定结果对所述自移机尾进行迈步控制。
16.为了实现上述目的,本技术第三方面实施例提供了一种电子设备,包括:,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时,实现如权利要求1
‑
7中任一项所述的自移机尾的迈步控制方法。
17.为了实现上述目的,本技术第四方面实施例提供了一种计算机可读存储介质,该程序被处理器执行时实现如权利要求1
‑
7中任一项所述的自移机尾的迈步控制方法。
18.为了实现上述目的,本技术第五方面实施例提供了一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现如权利要求1
‑
7中任一项所述的自移机尾的迈步控制方法。
附图说明
19.图1为本技术一个实施例公开的自移机尾的迈步控制方法的方法示意图。
20.图2为本技术另一个实施例公开的自移机尾的迈步控制方法的方法示意图。
21.图3为本技术另一个实施例公开的自移机尾第一初始位置和第二初始位置的示意图。
22.图4为本技术另一个实施例公开的自移机尾的迈步控制方法的方法示意图。
23.图5为本技术另一个实施例公开的自移机尾的迈步控制方法的方法示意图。
24.图6为本技术另一个实施例公开的自移机尾的迈步控制方法的方法示意图。
25.图7为本技术一个实施例公开的自移机尾的迈步控制装置的结构示意图。
26.图8为本技术实施例公开的一种电子设备的结构示意图。
具体实施方式
27.为了更好的理解上述技术方案,下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
28.下面参考附图描述本技术实施例的一种自移机尾的迈步控制方法、装置及电子设备。
29.图1是本技术公开的一个实施例的一种自移机尾的迈步控制方法的流程示意图。
30.如图1所示,本技术实施例提出的自移机尾的迈步控制方法,具体包括以下步骤:
31.s101、获取自移机尾对应的总迈步距离。
32.其中,总迈步距离,指的是自移机尾需要完成的总的迈步距离,可以根据实际情况进行设定。
33.需要说明的是,本技术对于获取总迈步距离的具体设定方式不作限定,可以根据实际情况进行选取。
34.举例而言,可以对用户在显示界面上的目标操作进行监控,例如,可以对用户针对总迈步距离的输入操作进行监控,以获取用户输入的总迈步距离。
35.s102、获取自移机尾的当前单步可前进距离。
36.需要说明的是,在试图控制自移机尾进行迈步时,实质上是对两个推移油缸进行控制。因此,本技术实施例中,可以先获取自移机尾的第一推移油缸(左推移油缸)的第一初始位置,以及第二推移油缸(右推移油缸)的第二初始位置。进一步地,可以根据第一初始位置和第二初始位置,获取自移机尾的当前单步可前进距离。
37.需要说明的是,在获取第一推移油缸的第一初始位置,以及第二推移油缸的第二初始位置之前,可以对刚性架的升起程度进行识别,并在确定刚性架完全升起后,读取第一初始位置和第二初始位置。
38.s103、判断总迈步距离是否小于当前单步可前进距离,并根据判定结果对自移机尾进行迈步控制。
39.本技术实施例中,在获取到自移机尾的总迈步距离和当前单步可前进距离后,可以判断总迈步距离是否小于当前单步可前进距离,进一步地,可以根据判断结果,对自移机尾进行迈步控制。
40.可选地,当总迈步距离小于当前单步可前进距离时,可以以总迈步距离为主要依据,对第一推移油缸和第二推移油缸进行控制,从而实现自移机尾的迈步控制;当总迈步距离大于等于当前单步可前进距离,可以以预先设定的预设迈步距离为主要依据,对第一推移油缸和第二推移油缸进行控制,从而实现自移机尾的迈步控制。
41.本技术提供的自移机尾的迈步控制方法,通过获取自移机尾对应的总迈步距离,并获取自移机尾的当前单步可前进距离,进而判断总迈步距离是否小于当前单步可前进距离,并根据判定结果对自移机尾进行迈步控制。由此,本技术可以实现自移机尾前进任意迈步距离,并在完成设定迈步距离后,自动停止前进,实现自移机尾与搭接设备可弯曲胶带机任意长度的自动搭接,提高了自移机尾迈步过程中的高效性,准确性以及可靠性。
42.需要说明的是,为了确保自移机尾的迈步控制过程中的准确性,本技术中,在获取
当前单步可前进距离之前,可以对显示器等显示装置的参数进行设定,并对位移传感器等采集装置进行零点位置标定及最大位置的标定。
43.针对对显示装置的参数进行设定,作为一种可能的实现方式,可以对参数的精度进行设定。需要说明的是,对于不同参数,可以设置相同的精度,也可以设定不同的精度。
44.举例而言,针对用户于显示器的参数设置界面上输入的总迈步距离,可以根据实际需求将精度设置为精确到1m、0.1m、0.01m等;针对用户于参数设置界面上输入的任一推移油缸的有效行程maxdis,可以根据实际需求将精度设置为精确到1mm。
45.需要说明的是,本技术对于实现设定的参数在plc(programmable logic controller,可编程逻辑控制器)与显示器之间进行读写的通信方式不作限定,可以根据实际情况进行选取。可选地,可以基于modbus tcp(modbus transmission control protocol)通信协议,实现设定的参数在plc与显示器之间进行读写的通信。
46.针对对位移传感器等采集装置进行零点位置标定及最大位置的标定,作为一种可能的实现方式,可选地,可以向自移机尾发出第一操作指令,其中,第一操作指令用于指示将第一推移油缸和第二推移油缸操作至完全缩回的状态。进一步地,当两个推移油缸处于完全缩回状态下时,可以向plc发出零点校准指令,以获取此时第一推移油缸对应的位移传感器的采集值,以及第二推移油缸对应的位移传感器的采集值,并分别标记为zerodisdata_first(第一推移油缸对应的采集值)和zerodisdata_second(第二推移油缸对应的采集值)。
47.进一步地,可以向自移机尾发出第二操作指令,其中,第二操作指令用于指示将第一推移油缸和第二推移油缸操作至完全伸出的状态。进一步地,当两个推移油缸处于完全伸出状态下时,可以向plc发出最大位置校准指令,以获取此时第一推移油缸对应的位移传感器的采集值,以及第二推移油缸对应的位移传感器的采集值,并分别标记为maxdisdata_first(第一推移油缸对应的采集值)和maxdisdata_second(第二推移油缸对应的采集值)。
48.进一步地,在完成对位移传感器等采集装置进行零点位置及最大位置的标定之后,可以获取第一推移油缸和第二推移油缸的当前采集值,然后根据当前采集值、有效行程maxdis和上述标定得到的两组采集值,获取第一推移油缸和第二推移油缸的当前位移值,以完成参数的设定和位移传感器的标定。
49.可选地,可以通过以下公式,获取第一推移油缸和第二推移油缸的当前位移值:
[0050][0051][0052]
其中,dis_first为第一推油缸的当前位移值,disdata_first为第一推油缸的当前采集值,zerodisdata_first为第一推油缸零点位置对应的采集值,maxdisdata_first为第一推油缸最大位置对应的采集值,maxdis为有效行程,dis_second为第二推油缸的当前位移值,disdata_second为第二推油缸的当前采集值,zerodisdata_second为第二推油缸零点位置对应的采集值,maxdisdata_second为第二推油缸最大位置对应的采集值。
[0053]
进一步地,在完成参数设定以及位移传感器的标定后,可以获取自移机尾的当前单步可前进距离。
[0054]
作为一种可能的实现方式,如图2所示,在上述实施例的基础上,上述步骤中获取自移机尾的当前单步可前进距离的具体过程,包括以下步骤:
[0055]
s201、获取自移机尾的第一推移油缸的第一初始位置,以及第二推移油缸的第二初始位置。
[0056]
其中,第一初始位置和第二初始位置,指的是第一推移油缸和第二推移油缸当前已伸出的距离。例如,如图3所示,第一初始位置和第二初始位置分别为initdis_first,initdis_second。
[0057]
s202、根据第一初始位置和第二初始位置,获取当前单步可前进距离。
[0058]
进一步地,在获取当前单步可前进距离后,可以判断总迈步距离是否小于当前单步可前进距离。
[0059]
下面分别针对总迈步距离小于当前单步可前进距离,以及总迈步距离大于或者等于当前单步可前进距离的情况进行解释说明。
[0060]
针对总迈步距离小于当前单步可前进距离,作为一种可能的实现方式,响应于总迈步距离小于当前单步可前进距离,则控制两个推移油缸均按照总迈步距离进行最后一个迈步循环。也就是说,在本技术实例中,当总迈步距离小于当前单步可前进距离时,第一推移油缸和第二推移油缸直接进行最后一个迈步循环。
[0061]
举例而言,当总迈步距离为10m,当前单步可前进距离为15m时,第一推油缸和第二推油缸均完成总迈步距离10m后,电磁阀输出停止,完成当前运行周期内的自移机尾迈步控制。
[0062]
需要说明的是,当总迈步距离小于当前单步可前进距离时,说明总迈步距离小于有效行程与第一初始位置之差,且总迈步距离小于有效行程与第二初始位置之差,即:totaldis<maxdis-initdis_first,且totaldis<maxdis-initdis_second,则在这一迈步循环中,在第一推移油缸和第二推移油缸均按照总迈步距离前进后电磁阀输出停止,此时,在当前运行周期内,自移机尾迈步控制已完成,等待下一个运行周期内继续向前迈步。
[0063]
此种情况下,第一推移油缸的当前位移值大于或者等于第一初始位置与总迈步距离之和,且第二推移油缸的当前位移值大于或者等于第二初始位置与总迈步距离之和,即:dis_first≥initdis_first+totaldis、且dis_second≥initdis_second+totaldis;同时,已完成迈步距离根据第一推移油缸的当前位移值和第二推移油缸的当前位移值中最小值确定,且已完成迈步距离大于或者等于总迈步距离,即:finishdis=min(dis_first,dis_second),且finishdis>=totaldis。
[0064]
针对总迈步距离大于或者等于当前单步可前进距离,作为一种可能的实现方式,如图4所示,在上述实施例的基础上,包括以下步骤:
[0065]
s301、响应于总迈步距离大于或者等于当前单步可前进距离,则控制两个推移油缸均按照预设迈步距离进行迈步。
[0066]
例如,当总迈步距离为15m,前单步可前进距离为10m,预设迈步距离为5m时,第一推油缸和第二推油缸均按照预设迈步距离5m进行迈步。
[0067]
需要说明的是,当总迈步距离大于或者等于当前单步可前进距离时,说明总迈步距离大于或者等于有效行程与第一初始位置之差,且总迈步距离大于或者等于有效行程与第二初始位置之差,即:totaldis≥maxdis-initdis_first,且totaldis≥maxdis-
initdis_second,则在这一迈步循环中,第一推移油缸和第二推移油缸按照预设迈步距离进行迈步。
[0068]
其中,预设迈步距离小于总迈步距离,且预设迈步距离可以根据实际情况进行设定,例如,可以设定预设迈步距离与当前单步可前进距离一致;又例如,可以设定预设迈步距离大于当前单步可前进距离且小于总迈步距离。
[0069]
在这一迈步循环中,在第一推移油缸和第二推移油缸均按照预设迈步距离前进后电磁阀不输出停止,且在当前运行周期内,自移机尾迈步控制未完成,继续执行当前运行周期内的下一个迈步循环。
[0070]
此种情况下,第一推油缸的当前位移值为有效行程与第一初始位置之差,且第二推油缸的当前位移值为有效行程与第二初始位置之差,即:dis_first=maxdis
‑
initdis_first,且dis_second=maxdis
‑
initdis_second;同时,第一推移油缸的当前位移值小于或者等于总迈步距离,第二推移油缸的当前位移值小于或者等于总迈步距离,即:dis_first<=totaldis、dis_second<=totaldis,而且,已完成迈步距离根据第一推移油缸的当前位移值和第二推移油缸的当前位移值中最小值确定,且已完成迈步距离大于或者等于总迈步距离,即:finishdis=min(dis_first,dis_second),且finishdis<=totaldis。
[0071]
需要说明的是,当已完成的距离等于总迈步距离时,在第一推移油缸和第二推移油缸均按照总迈步距离前进后电磁阀输出停止,此时,在当前运行周期内,自移机尾迈步控制已完成,等待下一个运行周期内继续向前迈步;当已完成的距离小于总迈步距离时,在第一推移油缸和第二推移油缸均按照预设迈步距离前进后电磁阀不输出停止,且在当前运行周期内,自移机尾迈步控制未完成,继续执行当前运行周期内的下一个迈步循环。
[0072]
s302、获取自移机尾的剩余迈步距离,并重新获取自移机尾的当前单步可前进距离。
[0073]
在本技术实例中,在控制两个推移油缸按照预设迈步距离进行迈步后,可以获取自移机尾在上一迈步循环中已经完成的距离,并根据在上一迈步循环中已经完成的距离和总迈步距离,获取自移机尾的剩余迈步距离。
[0074]
可选地,可以将上一迈步循环中已经完成的距离标记为initfinishdis,然后根据以下公式获取自移机尾的剩余迈步距离:
[0075]
剩余迈步距离=totaldis﹣initfinishdis
[0076]
举例而言,当总迈步距离为20m,上一迈步循环中已经完成的距离为10m时,则自移机尾剩余迈步距离为20
‑
10=10m。
[0077]
进一步地,在获取到自移机尾的剩余迈步距离后,可以重新获取自移机尾的当前单步可前进距离。
[0078]
需要说明的是,重新获取自移机尾的当前单步可前进距离与上述实施例中获取自移机尾的当前单步可前进距离的过程相同,此处不再赘述。
[0079]
s303、判断剩余迈步距离是否小于重新获取的当前单步可前进距离,并根据判定结果继续对自移机尾进行迈步控制。
[0080]
下面分别针对剩余迈步距离小于重新获取的当前单步可前进距离,以及剩余迈步距离大于或者等于重新获取的当前单步可前进距离的情况进行解释说明。
[0081]
针对剩余迈步距离小于重新获取的当前单步可前进距离,作为一种可能的实现方
式,响应于剩余迈步距离小于重新获取的当前单步可前进距离,则控制两个推移油缸均按照剩余迈步距离进行最后一个迈步循环。也就是说,在本技术实例中,当剩余迈步距离小于重新获取的当前单步可前进距离时,第一推移油缸和第二推移油缸直接进行最后一个迈步循环。
[0082]
举例而言,当剩余迈步距离为5m,重新获取的单步可前进距离为10m时,说明剩余迈步距离小于重新获取的当前单步可前进距离,则控制两个推移油缸在最后一个迈步循环内前进5m。
[0083]
需要说明的是,当剩余迈步距离小于重新获取的当前单步可前进距离时,说明剩余迈步距离(总迈步距离与上一迈步循环中已经完成的距离之差)小于有效行程,即:totaldis
‑
initfinishdis<maxdis,则在这一迈步循环中,在第一推移油缸和第二推移油缸均按照剩余迈步距离前进后电磁阀输出停止,此时,在当前运行周期内,自移机尾迈步控制已完成,等待下一个运行周期内继续向前迈步。
[0084]
此种情况下,第一推移油缸的当前位移值大于或者等于剩余迈步距离,且第二推移油缸的当前位移值大于或者等于剩余迈步距离,即:dis_first>=totaldis
‑
initfinishdis、且dis_second>=totaldis
‑
initfinishdis;同时,已完成迈步距离根据上一迈步循环中已经完成的距离和第一推移油缸的当前位移值之和,以及上一迈步循环中已经完成的距离和第二推移油缸的当前位移值中最小值确定,且已完成迈步距离大于或者等于总迈步距离,即:finishdis=min(initfinishdis+dis_first,initfinishdis+dis_second),finishdis>=totaldis。
[0085]
针对剩余迈步距离大于或者等于重新获取的当前单步可前进距离,作为一种可能的实现方式,如图5所示,在上述实施例的基础上,包括以下步骤:
[0086]
s401、响应于剩余迈步距离大于或者等于重新获取的当前单步可前进距离,则控制两个推移油缸均按照预设迈步距离进行迈步。
[0087]
需要说明的是,当剩余迈步距离大于或者等于重新获取的当前单步可前进距离时,说明剩余迈步距离大于或者等于有效行程,即:totaldis
‑
initfinishdis>=maxdis,则在这一迈步循环中,两个推移油缸按照预设的迈步距离进行迈步。
[0088]
举例而言,当剩余迈步距离为10m,重新获取的单步可前进距离为5m时,此时,剩余迈步距离大于重新获取的当前单步可前进距离,则控制第一推油缸、第二推油缸按照预设迈步距离5m进行迈步。
[0089]
进一步地,可以将总的已完成的距离记为finishdis,当已完成的迈步距离等于总迈步距离时,即:finishdis=totaldis,则两个推移油缸完成总迈步距离后,电磁阀停止输出,当已完成的迈步距离小于总迈步距离时,即:finishdis<totaldis,则在两个推移油缸按照预设迈步距离进行迈步后,须进入下一迈步循环。
[0090]
s402、返回获取自移机尾的剩余迈步距离,并重新获取自移机尾的当前单步可前进距离步骤,直至剩余迈步距离小于重新获取的当前单步可前进距离,控制两个推移油缸均按照剩余迈步距离进行最后一个迈步循环。
[0091]
在本技术实例中,当已完成的迈步距离小于总迈步距离时,需要返回获取自移机尾的剩余迈步距离,并重新获自移机尾的当前单步可前进距离,直至剩余迈步距离小于重新获取的当前单步可前进距离,则控制两个推移油缸进入最后一个迈步循环。
[0092]
举例而言,当剩余迈步距离为10m,重新获取的当前单步可前进距离为6m时,则控制两个推移油缸进入下一个迈步循环,然后重新获取剩余迈步距离为4m,重新获取当前单步可前进距离为6m,直至剩余迈步距离小于重新获取的当前单步可前进距离,则控制两个推移油缸均按照剩余迈步距离进行最后一个迈步循环。
[0093]
本技术提供的自移机尾的迈步控制方法,通过判断总迈步距离与当前单步可前进距离之间的大小关系,对控制自移机尾进行迈步,同时,当自移机尾完成一个迈步循环之后,通过判断剩余迈步距离和重新获取的当前单步可前进距离之间的大小关系,确定自移机尾是否进入最后一个迈步循环。由此,本技术能够针对自移机尾运行中出现的所有情况,控制自移机尾进行迈步,进一步提高自移机尾迈步过程中的准确性和可靠性。
[0094]
进一步地,由于第一推移油缸和第二推移油缸可能共用相同的液压管路,也可能分别使用独立的液压管路,此种情况下,可以根据第一推移油缸和第二推移油缸的液压管路使用情况,获取匹配的电磁阀控制方式,进而根据电磁阀控制方式对第一推移油缸和第二推移油缸在最后一个迈步循环内的运行进行控制。
[0095]
作为一种可能的实现方式,如图6所示,具体包括以下步骤:
[0096]
s501、获取第一推移油缸和第二推移油缸的电磁阀控制方式。
[0097]
需要说明的是,在获取第一推移油缸和第二推移油缸的电磁阀控制方式时,可以根据液压管路的使用情况来获取匹配电磁阀控制方式。可选地,当第一推移油缸和第二推移油缸分别使用独立的液压管路时,两个推移油缸相互独立,则两个推移油缸的电磁阀控制方式为第一电磁阀控制方式;当第一推移油缸和第二推移油缸共用相同的液压管路时,两个推移油缸相互影响,则两个推移油缸的电磁阀控制方式为第二电磁阀控制方式。
[0098]
s502、响应于电磁阀控制方式为第一电磁阀控制方式,则对两个推移油缸进行独立控制。
[0099]
需要说明的是,当电磁阀控制方式为第一电磁阀控制方式时,在最后一个迈步循环内,可以同时输出针对第一推移油缸和第二推移油缸的控制信号,也就是说,此时同时输出两个控制信号,对两个推移油缸进行独立控制。
[0100]
可选地,在第一推移油缸累计完成设定的总迈步距离后,第一推移油缸电磁阀输出停止,此时不影响第二推移油缸电磁阀的输出;在第二推移油缸累计完成设定的总迈步距离后,第二推移油缸电磁阀输出停止,此时不影响第一推移油缸电磁阀的输出。
[0101]
举例而言,可以同时输出针对第一推移油缸和第二推移油缸的控制信号,两个推移油缸分别响应于对应的控制信号进行迈步,若第一推移油缸先累计完成总迈步距离,则先控制第一推移油缸电磁阀输出停止;若第二推移油缸先累计完成总迈步距离,则先控制第二推移油缸电磁阀输出停止。
[0102]
s503、响应于电磁阀控制方式为第二电磁阀控制方式,则对两个推移油缸进行联合控制。
[0103]
需要说明的是,当电磁阀控制方式为第二电磁阀控制方式时,在最后一个迈步循环内,可以输出一个针对第一推移油缸和第二推移油缸的控制信号,也就是说,此时仅输出一个控制信号,对两个推移油缸进行联合控制。
[0104]
可选地,可以同时控制第一推移油缸和第二推移油缸,直至累计完成设定的总迈步距离后,控制第一推移油缸电磁阀输出停止以及第二推移油缸电磁阀输出停止。
[0105]
举例而言,可以输出一个针对第一推移油缸和第二推移油缸的控制信号,两个推移油缸响应于同一个控制信号进行迈步,直至两个推移油缸均完成总迈步距离后,控制两个推移油缸电磁阀输出停止。
[0106]
需要说明的是,由于电磁阀控制方式为第二电磁阀控制方式,此种情况下,液压管路中的液压油到达两个推移油缸的先后顺序不同,待液压油均到达两个推移油缸后完成的当前循环。
[0107]
本技术提供的自移机尾的迈步控制方法,根据第一推移油缸和第二推移油缸电磁阀控制是否单独控制,进而控制第一推移油缸和第二推移油缸按照匹配的推移油缸控制策略进行最后一个迈步循环。由此,本技术能够根据不同的电磁阀控制方式,对两个推移油缸的最后一个迈步循环进行控制,提高了自移机尾在迈步过程中的灵活性以及适应性,进一步提高了自移机尾在迈步过程中高效性和可靠性。
[0108]
图7是本技术公开的一个实施例的一种自移机尾的迈步控制装置的结构示意图。
[0109]
如图7所示,该自移机尾的迈步控制装置1000,包括:确定模块110、第一获取模块120、控制模块130。其中,
[0110]
第一获取模块110,用于获取自移机尾对应的总迈步距离;
[0111]
第一获取模块120,用于获取所述自移机尾的当前单步可前进距离;
[0112]
控制模块130,用于判断所述总迈步距离是否小于所述当前单步可前进距离,并根据判定结果对所述自移机尾进行迈步控制。
[0113]
本技术提供的自移机尾的迈步控制装置,通过获取自移机尾对应的总迈步距离,并获取自移机尾的当前单步可前进距离,进而判断总迈步距离是否小于当前单步可前进距离,并根据判定结果对自移机尾进行迈步控制。由此,本技术可以实现自移机尾前进任意设定距离,并在完成该设定距离时,自动停止前进,实现自移机尾与搭接设备可弯曲胶带机任意长度的自动搭接,提高了自移机尾迈步过程中的高效性,准确性以及可靠性。
[0114]
为了实现上述实施例,本技术还提出了一种电子设备2000,如图8所示,包括存储器210、处理器220及存储在存储器210上并可在处理器220上运行的计算机程序,处理器执行程序时,实现如权利要求1
‑
7中任一项所述的自移机尾的迈步控制方法。
[0115]
为了实现上述实施例,本技术还提出一种非临时性计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如权利要求1
‑
7中任一项所述的自移机尾的迈步控制方法。
[0116]
为了实现上述实施例,本技术还提出一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时,实现如上所述的自移机尾的迈步控制方法。
[0117]
在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0118]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,
除非另有明确具体的限定。
[0119]
在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
[0120]
在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0121]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0122]
尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1