自动包装生产装置及方法与流程
1.本发明提供一种自动包装生产装置及方法,涉及包装领域。
背景技术:
2.在需要对无纺布进行包装时,一般采用套袋包装,常用的技术为人工套膜,但该方法往往带来生产率低下的问题,且由于无法完全密封等问题,在产品交付时存在受潮的情况,现有技术中虽然存在部分自动包装的设备,但大多功能单一,不仅不能解决上述问题,还不能适应各种型号的产品。
技术实现要素:
3.本发明的目的是提供一种能克服上述缺陷的自动包装生产装置及方法,可以实现自动化包装的目的,同时适应各种型号产品,良好密封。
4.为实现上述发明目的,本发明提供一种自动包装生产装置,包括触摸屏,所述触摸屏与控制系统连接,控制系统分别与抓轴粘胶装置、挡料抓取装置、边料抓取测量放气装置、纸管切磨穿轴一体机、冷拉伸膜包装机连接、升降旋转平台、送膜机、贴标机完成品平台和包装平台连接;
5.触摸屏与控制系统设置在桁架一侧,所述桁架上设有抓轴粘胶装置、挡料抓取装置、边料抓取测量放气装置;边料抓取测量放气装置位于抓轴粘胶装置和挡料抓取装置一侧;所述桁架一侧设有纸管切磨穿轴一体机,桁架另一侧设有冷拉伸膜包装机,纸管切磨穿轴一体机和冷拉伸膜包装机之间的桁架下方设有升降旋转平台;
6.冷拉伸膜包装机两侧分别设有完成品平台和包装平台;送膜机和贴标机分别位于完成品平台两侧。
7.在整个生产线中,当分切机工作完毕后,布卷通过挡料抓取装置被接引至升降旋转平台;升降旋转平台采用伺服电机加滚珠丝杠进行升降,旋转则采用两个滚筒及皮带的方式配合旋转,升降的作用在于无论产品大小均能保证气胀轴轴心位于固定水平线,而旋转的目的在于方便抓轴粘胶装置粘贴固定胶带。
8.胶带粘贴完毕后,通过边料抓取测量放气装置确定气胀轴位置并进行放气抽轴的操作,纸管切磨穿轴一体机将气胀轴抽出后,再次穿入纸管,然后送入升降旋转平台上进行粘贴双面胶,抓轴粘胶装置将其抓取等待放入分切机中以备下一次包装工序;
9.抽走气胀轴后的布卷由挡料抓取装置抓取到包装平台,由伸缩悬轴进行支撑。送膜机构将冷缩膜送入包装机,折边封口。然后包装机从送膜工位转移至包装工位。伸缩悬轴前移,将布卷推入包装机,直至到达完成品平台,随后折边封口。完成品平台进行称重运输。最后由贴标机械手贴标。
10.人工通过触摸屏输入所包装产品的直径、长度后,系统会自动匹配拉膜直径、升降平台高度,以实现不通直径不同长度的产品包装。本生产线实现了分切机后段抽轴,贴胶带,穿纸管,套袋,抽真空,称重,贴标的全部自动化。把工人从重复繁重的工作中解放出来,
仅需在系统上输入产品数据即可;解决了长期困扰本行业的劳动强度高、效率低等问题;采取冷拉伸套膜包装形式,彻底解决了运输过程中产品受潮报废问题。
11.优选的,桁架包括纵梁及在纵梁上滑动的横梁i,抓轴粘胶装置设置在横梁i上,所述抓轴粘胶装置包括抓轴装置和粘胶装置,所述抓轴装置与横梁i固定连接,所述粘胶装置通过滑轨在横梁i上滑动;
12.所述粘胶装置包括双面胶粘贴机、外紧固标签粘贴机;
13.所述双面胶粘贴机用于粘贴在空轴上与布卷连接;
14.所述外紧固标签粘贴机用于防止布卷散开;
15.所述抓轴装置包括固定在横梁i上的护板,所述护板内设有滑动平台,空轴抓取折叠臂在滑动平台上上下移动;滑动平台可以采用齿轮齿条上下移动或者丝杠移动的方式;
16.空轴抓取折叠臂包括折叠拉杆,折叠拉杆一端与滑动平台上的螺母滑块连接,折叠拉杆另一端与摆轴气缸连接,摆轴气缸活塞杆与夹紧摆轴一端转轴式连接,夹紧摆轴通过旋转轴与空轴摆臂转轴式连接;夹紧摆轴顶部设有摩擦轮,所述摩擦轮与从动轮通过齿轮啮合传动,从动轮通过皮带与主动轮连接,主动轮与伺服电机连接。
17.优选的,还包括在纵梁上滑动的横梁ii,所述横梁ii上通过滑轨设有若干个并排设立的抓取装置,抓取装置两侧设有挡料装置;
18.所述抓取装置包括抓取气缸、中心固定光轴、剪刀臂、侧导向光轴、夹持轮;两个剪刀臂通过抓取杆首尾相连,抓取气缸与抓取杆连接,中心固定光轴上的两个滑套分别与一个剪刀臂交叉连接点固定连接,两个剪刀臂的两端与安装在支架上的侧导向光轴连接,侧导向光轴底部设有上夹持轮,支架底部设有下夹持轮;
19.挡料装置包括固定在横梁ii上的旋转驱动缸,所述旋转驱动缸通过与曲柄连杆机构连接,曲柄连杆机构通过中轴连接在横梁ii上,挡料装置内部设有伸缩驱动缸,所述伸缩驱动缸(2)与阻挡杆连接。阻挡气缸安装在挡料装置下方,限定挡料装置位置。
20.挡料装置用于在布卷进入升降旋转平台后的接引,使其缓慢进入指定位置,当布卷内气胀轴抽走后,抓取装置将布卷抓至包装平台上。
21.优选的,边料抓取测量放气装置包括升降主体、测量臂、夹头、轴夹、旋转主体;
22.横梁i一侧的桁架上设有横向滑轨,横向滑轨上设有纵向滑轨,纵向滑轨与升降主体连接,升降主体通过齿条传动与旋转主体连接,所述旋转主体前后两端分别设有夹头和轴夹,旋转主体上方设有测量臂;
23.所述轴夹内设有气针;气针底部设有抱紧气缸,所述抱紧气缸通过曲柄连杆机构与抱紧爪连接,气针设置于抱紧爪之间;
24.优选的,冷拉伸膜包装机包括机架,所述机架上设有可在机架上四向移动的拉伸臂和水平移动的折边臂,拉伸臂上方设有进膜轮,进膜轮与压紧气缸连接,机架上还设有平行设置的前端封口切边和前端封口热合,前端封口切边上设有前端切刀,前端封口切边和前端封口热合之间设有折边臂;所述折边臂通过线轨和连接板分别与前端封口切边和前端封口热合连接;前端封口切边和前端封口热合在气缸的作用下相向移动,折边臂在前端封口切边和前端封口热合移动时向内折边;
25.机架上还设有平行设置的尾端封口切边和尾端封口热合;
26.优选的,送膜机包括送膜架,送膜架一侧设有助力轮,送膜架另一侧设有开膜架,
助力轮和开膜架之间设有膜张力调节机构;所述开膜架上设有调整螺杆,所述调整螺杆通过轴承座连接花键轴,花键轴上设有送膜轮,送膜轮之间设有悬浮内撑开膜机构;
27.所述膜张力调节机构采用可上下移动的调节杆;
28.所述悬浮内撑开膜机构包括两根并排设立的伸缩杆,每根所述伸缩杆上下两端分别设有两个内滚轮,送膜轮设置在内滚轮之间;
29.所述送膜轮采用外边沿凸起的结构,内滚轮卡接在送膜轮内边沿。
30.优选的,所述包装平台包括升降平台,升降平台上设有行走门架,行走门架在电机的作用下沿升降平台上的齿条移动,行走门架上设有推进轴;推进轴内设有伸缩悬轴,伸缩悬轴内设有真空管。
31.提供一种采用所述装置的自动包装生产方法,包括以下步骤:
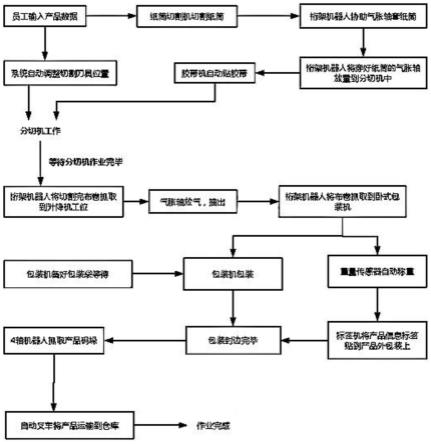
32.(1)员工通过触摸屏输入产品直径、长度;
33.(2)控制系统调节各个机构进行匹配,从而调整拉膜直径、升降平台高度,以实现不通直径不同长度的产品包装;
34.(3)分切机工作分切布卷;
35.(4)桁架机器人完成粘胶、抽放气胀轴,然后抓取布卷到卧式包装机;卧式包装机包装、称重、贴标签、封边;
36.(5)机器人抓取产品码垛;
37.(6)自动叉车将产品运输到仓库。
38.优选的,步骤(1)具体的包括:员工输入产品数据后,纸筒切割机切割纸筒,纸管切磨穿轴一体机(9)协助气胀轴套纸筒,粘胶装置对穿好纸筒的气涨轴粘贴双面胶后,由抓轴装置将其放置到分切机中,分切机工作;
39.步骤(4)具体的包括:
40.分切机将切割完成的布卷推出,挡料装置将切割完的布卷进行支撑阻挡缓慢移动至升降旋转平台的滚轴上,粘胶装置的外紧固标签粘贴机将布卷封边;边料抓取测量放气装置在滑轨上进行移动,通过测量臂的扭矩模式测定布卷位置后,旋转旋转主体(3-5),使轴夹对准布卷内气胀轴后,通过抱紧爪抱紧气胀轴,气针进行推入放气;气胀轴放气后继续旋转旋转主体,使夹头对准气胀轴并将其推出,推出后通过夹头内气缸工作,将布卷的边料进行胀紧侧移回收;
41.纸管切磨穿轴一体机对气胀轴进行抽出并再次穿入纸管后准备再次进入升降旋转平台的滚轴;
42.根据不同的布卷大小,采取对应数量的抓取装置对布卷进行抓取,并将其移动至包装平台;由包装平台上的伸缩悬轴进行支撑;
43.布卷从升降旋转平台移走后,穿完纸管的气胀轴再次进入升降旋转平台的滚轴;粘胶装置对穿好纸筒的气涨轴粘贴双面胶后,由抓轴装置将其放置到分切机中,分切机工作。
44.优选的,步骤(4)具体的包括:
45.送膜机通过助力轮动作,冷缩膜经过助力轮、膜张力调节机构后分开进入送膜轮和悬浮内撑开膜机构之间;冷缩膜在经过送膜轮和悬浮内撑开膜机构进入拉伸臂,压紧气缸将冷缩膜压紧在拉伸臂以后,进膜轮旋转,将冷缩膜套在拉伸臂上;
46.前端封口切边和前端封口热合在气缸的作用下相向移动,折边臂在前端封口切边和前端封口热合移动时向内折边为“m”型;前端封口切边和前端封口热合对冷缩膜进行热合切边;
47.冷拉伸膜包装机在机架上侧移至完成品平台和包装平台之间的包装工位,行走门架在电机作用下沿齿条移动至冷拉伸膜包装机内,布卷在行走门架和伸缩悬轴的作用下完全进入冷缩膜,尾端封口切边和尾端封口热合对冷缩膜尾部进行热合切边;完成品平台进行称重运输;最后由贴标机械手贴标。
48.与现有技术相比,本发明的有益效果是:
49.人工通过触摸屏输入所包装产品的直径、长度后,系统会自动匹配拉膜直径、升降平台高度,以实现不通直径不同长度的产品包装。本生产线实现了分切机后段抽轴,贴胶带,穿纸管,套袋,抽真空,称重,贴标的全部自动化。把工人从重复繁重的工作中解放出来,仅需在系统上输入产品数据即可;解决了长期困扰本行业的劳动强度高、效率低等问题;采取冷拉伸套膜包装形式,彻底解决了运输过程中产品受潮报废问题。
附图说明
50.图1是本发明的工作流程示意图;
51.图2是本发明结构示意图;
52.图3是本发明抓轴粘胶装置示意图;
53.图4是本发明空轴抓取折叠臂示意图;
54.图5是本发明抓取装置示意图;
55.图6是本发明挡料装置示意图;
56.图7是本发明边料抓取测量放气装置示意图;
57.图8是本发明拉伸臂示意图;
58.图9是本发明折边封口示意图;
59.图10是本发明送膜机示意图;
60.图11是本发明悬浮内撑开膜机构示意图;
61.图12是本发明完成品平台示意图;
62.图13是本发明包装平台示意图;
63.图14是本发明纸管切磨穿轴一体机;
64.图15是本发明送膜轮和内滚轮位置示意图;
65.图16是本发明送膜轮和内滚轮结构示意图;
66.图17是本发明拉膜爪示意图;
67.图18是升降旋转平台结构示意图;
68.图19是本发明抓轴粘胶装置立体图;
69.图20是本发明空轴抓取折叠臂立体图;
70.图21是本发明提升机构结构示意图。
具体实施方式
71.实施例1
72.结合附图1-21对本发明作进一步说明:
73.一种自动包装生产装置,包括触摸屏,所述触摸屏与控制系统连接,控制系统分别与抓轴粘胶装置1、挡料抓取装置2、边料抓取测量放气装置3、纸管切磨穿轴一体机9、冷拉伸膜包装机4连接、升降旋转平台、送膜机5、贴标机7完成品平台6和包装平台8连接;
74.触摸屏与控制系统设置在桁架一侧,桁架上设有抓轴粘胶装置1、挡料抓取装置2、边料抓取测量放气装置3;边料抓取测量放气装置3位于抓轴粘胶装置1和挡料抓取装置2一侧;所述桁架一侧设有纸管切磨穿轴一体机9,桁架另一侧设有冷拉伸膜包装机4,纸管切磨穿轴一体机9和冷拉伸膜包装机4之间的桁架下方设有升降旋转平台;
75.冷拉伸膜包装机4两侧分别设有完成品平台6和包装平台8;送膜机5和贴标机7分别位于完成品平台6两侧。
76.桁架包括纵梁及在纵梁上滑动的横梁i,抓轴粘胶装置1设置在横梁i上,所述抓轴粘胶装置1包括抓轴装置和粘胶装置,所述抓轴装置与横梁i固定连接,所述粘胶装置通过滑轨在横梁i上滑动;
77.所述粘胶装置包括双面胶粘贴机1-1、外紧固标签粘贴机1-2;
78.所述双面胶粘贴机1-1用于粘贴在空轴上与布卷连接;
79.所述外紧固标签粘贴机1-2用于防止布卷散开;
80.所述抓轴装置包括固定在横梁i上的护板1-4,所述护板1-4内设有滑动平台,空轴抓取折叠臂1-3在滑动平台上上下移动;
81.空轴抓取折叠臂1-3包括折叠拉杆1-3-5,折叠拉杆1-3-5一端与滑动平台上的螺母滑块连接,折叠拉杆1-3-5另一端与摆轴气缸连接,摆轴气缸活塞杆与夹紧摆轴1-3-2一端转轴式连接,夹紧摆轴1-3-2通过旋转轴与空轴摆臂1-3-1转轴式连接;夹紧摆轴1-3-2顶部设有摩擦轮1-3-3,所述摩擦轮1-3-3与从动轮1-3-4通过齿轮啮合传动,从动轮1-3-4通过皮带与主动轮1-3-6连接,主动轮1-3-6与伺服电机连接。
82.还包括在纵梁上滑动的横梁ii,所述横梁ii上通过滑轨设有若干个并排设立的抓取装置 22,抓取装置两侧设有挡料装置21;
83.所述抓取装置22包括抓取气缸2-1、中心固定光轴2-2、剪刀臂2-3、侧导向光轴2-4、夹持轮2-5;两个剪刀臂2-3通过抓取杆首尾相连,抓取气缸2-1与抓取杆连接,中心固定光轴2-2上的两个滑套分别与一个剪刀臂2-3交叉连接点固定连接,两个剪刀臂2-3的两端与安装在支架上的侧导向光轴2-4连接,侧导向光轴2-4底部设有上夹持轮2-5,支架底部设有下夹持轮;
84.此机构用于圆柱型产品的定中心抓取。抓取气缸2-1提供驱动力,中心固定光轴2-2作为滑杆固定,剪刀臂2-3带动侧导向光轴2-4移动,由夹持轮2-5完成产品夹紧。
85.挡料装置21包括固定在横梁ii上的旋转驱动缸2-7,所述旋转驱动缸2-7通过与曲柄连杆机构连接,曲柄连杆机构通过中轴2-8连接在横梁ii上,挡料装置内部设有伸缩驱动缸 2-9,所述伸缩驱动缸2-9与阻挡杆连接。阻挡气缸安装在挡料装置下方,限定挡料装置位置。边料抓取测量放气装置3包括升降主体3-1、测量臂3-2、夹头3-3、轴夹3-4、旋转主体3-5;
86.横梁i一侧的桁架上设有横向滑轨,横向滑轨上设有纵向滑轨,纵向滑轨与升降主体3-1 连接,升降主体3-1通过齿条传动与旋转主体3-5连接,所述旋转主体3-5前后两端分
别设有夹头3-3和轴夹3-4,旋转主体3-5上方设有测量臂3-2;
87.所述轴夹3-4内设有气针;气针底部设有抱紧气缸,所述抱紧气缸通过曲柄连杆机构与抱紧爪连接,气针设置于抱紧爪之间;
88.此机构用于完成边料抓取,产品位置测量,气胀轴放气、推出工序,升降主体3-1、横向滑轨、纵向滑轨相互配合实现位置的移动,旋转主体3-5进行360
°
旋转,当测量臂3-2 朝前时,可以获得产品位置,当夹头3-3朝前时,可以进行抓取,当轴夹3-4朝前时可以用其内部的气针对气胀轴进行放气。
89.冷拉伸膜包装机4包括机架,所述机架上设有可在机架上水平移动的拉伸臂4-1-4和折边臂4-1-3,拉伸臂4-1-4上方设有进膜轮4-1-2,进膜轮4-1-2与压紧气缸4-1-1连接,机架上还设有平行设置的前端封口切边4-3-2和前端封口热合4-3-4,
90.前端封口切边4-3-2上设有前端切刀4-3-1,前端封口切边4-3-2和前端封口热合4-3-4 之间设有折边臂4-1-3;所述折边臂4-1-3通过线轨和连接板4-3-3分别与在前端封口切边4-3-2和前端封口热合4-3-4连接;前端封口切边4-3-2和前端封口热合4-3-4在气缸的作用下相向移动,折边臂4-1-3在前端封口切边4-3-2和前端封口热合4-3-4移动时向内折边;
91.机架上还设有平行设置的尾端封口切边4-2-1和尾端封口热合4-2-2;
92.送膜机5包括送膜架5-2,送膜架5-2一侧设有助力轮5-4,送膜架5-2另一侧设有开膜架5-1,助力轮5-4和开膜架5-1之间设有膜张力调节机构5-3;所述开膜架5-1上设有调整螺杆5-1-2,所述调整螺杆5-1-2通过轴承座连接花键轴5-1-3,花键轴5-1-3上设有送膜轮 5-1-1,送膜轮5-1-1之间设有悬浮内撑开膜机构5-1-4;
93.所述膜张力调节机构5-3采用可上下移动的调节杆;
94.所述悬浮内撑开膜机构5-1-4包括两根并排设立的伸缩杆5-1-6,每根所述伸缩杆上下两端分别设有两个内滚轮5-1-5,送膜轮5-1-1设置在内滚轮5-1-5之间;
95.所述送膜轮5-1-1采用外边沿凸起的结构,内滚轮5-1-5卡接在送膜轮5-1-1内边沿;
96.所述包装平台8包括升降平台8-1,升降平台8-1上设有行走门架8-5,行走门架8-5在电机的作用下沿升降平台8-1上的齿条移动,行走门架8-5上设有推进轴8-4;推进轴8-4 内设有伸缩悬轴8-3,伸缩悬轴8-3内设有真空管8-2。
97.升降平台8-1和升降旋转平台均采用提升机构进行升降,所述提升机构包括支架8-1-1。所述支架8-1-1上设有两组对称设置的剪刀型升降臂8-1-2,每组剪刀型升降臂8-1-2包括同侧的两个剪刀型升降臂8-1-2,每个升降臂8-1-2同侧的两端旋转固定在支架8-1-1上,另一侧的两端分别通过滑块与支架8-1-1上的滑轨连接,每组中的两个剪刀型升降臂8-1-2 底部与滑块连接的端部通过联轴器8-1-4连接,联轴器8-1-4通过螺母与丝杆8-1-5连接,进行丝杠传动,升降电机8-1-6与丝杆8-1-5传动,驱动剪刀型升降臂8-1-2升降。
98.一种自动包装生产方法,包括以下步骤:
99.(1)员工通过触摸屏输入产品直径、长度;员工输入产品数据后;
100.(2)控制系统调节各个机构进行匹配,从而调整拉膜直径、升降平台高度,以实现不通直径不同长度的产品包装;具体的提升机构根据产品直径进行升降,保证同心,送膜机和冷拉伸膜包装机对拉膜长度和直径进行调节,以使包装膜长度与产品匹配;
101.(3)分切机工作分切布卷;
102.(4)桁架机器人完成粘胶、抽放气胀轴,然后抓取布卷到卧式包装机;卧式包装机包装、称重、贴标签、封边;
103.(5)机器人抓取产品码垛;
104.(6)自动叉车将产品运输到仓库。
105.步骤1具体的包括:纸筒切割机切割纸筒,纸管切磨穿轴一体机9协助气胀轴套纸筒,粘胶装置对穿好纸筒的气涨轴粘贴双面胶后,由抓轴装置将其放置到分切机中,分切机工作;
106.步骤3具体的包括:
107.抓轴装置将切割完的布卷抓取到升降旋转平台内,挡料装置21对布卷进行支撑阻挡缓慢移动至升降旋转平台的滚轴上,粘胶装置的外紧固标签粘贴机1-2将布卷封边;边料抓取测量放气装置3在滑轨上进行移动,通过测量臂的扭矩模式测定布卷位置后,旋转旋转主体3-5,使轴夹3-4对准布卷内气胀轴后,通过抱紧爪抱紧气胀轴,气针进行推入放气;气胀轴放气后继续旋转旋转主体3-5,使夹头3-3对准气胀轴并将其推出,推出后通过夹头3-3内气缸工作,将布卷的边料进行胀紧侧移回收;
108.纸管切磨穿轴一体机9对气胀轴进行抽出并再次穿入纸管后准备再次进入升降旋转平台的滚轴;
109.根据不同的布卷大小,采取对应数量的抓取装置22对布卷进行抓取,并将其移动至包装平台8;由包装平台8上的伸缩悬轴8-3进行支撑;
110.布卷从升降旋转平台移走后,穿完纸管的气胀轴再次进入升降旋转平台的滚轴;粘胶装置对穿好纸筒的气涨轴粘贴双面胶后,由抓轴装置将其放置到分切机中,分切机工作。
111.步骤4具体的包括:
112.送膜机5通过助力轮5-4动作,冷缩膜经过助力轮5-4、膜张力调节机构5-3后分开进入送膜轮5-1-1和悬浮内撑开膜机构5-1-4之间;冷缩膜在经过送膜轮5-1-1和悬浮内撑开膜机构5-1-4进入拉伸臂4-1-4,压紧气缸4-1-1将冷缩膜压紧在拉伸臂4-1-4以后,进膜轮 4-1-2旋转,将冷缩膜套在拉伸臂4-1-4上;
113.前端封口切边4-3-2和前端封口热合4-3-4在气缸的作用下相向移动,折边臂4-1-3在前端封口切边4-3-2和前端封口热合4-3-4移动时向内折边为“m”型;前端封口切边4-3-2 和前端封口热合4-3-4对冷缩膜进行热合切边;
114.冷拉伸膜包装机4在机架上侧移至完成品平台和包装平台之间的包装工位,行走门架8-5 在电机作用下沿齿条移动至冷拉伸膜包装机4内,布卷在行走门架8-5和伸缩悬轴8-3的作用下完全进入冷缩膜,尾端封口切边4-2-1和尾端封口热合4-2-2对冷缩膜尾部进行热合切边;完成品平台进行称重运输;最后由贴标机械手贴标。
115.纸管切磨穿轴一体机9包括架体,架体上设有中转桁架9-4,架体内依次设有纸管料仓 9-6、磨管机9-2和纸管码位9-5、纸管自动切割机9-1和送轴机械手9-3;
116.纸管从纸管料仓9-6运出,转运至纸管自动切割机9-1,每切割一段送入磨管机9-2磨头。随后进入纸管码位9-5。由隔板隔开。送轴机械手9-3将气胀轴拉入纸管内,完成穿轴工序。
117.本发明的伸缩悬轴8-3可以实现多件产品同一包装,热合封边及抽真空互相配合增加包装夹持力和表面美观度;折边封口在包装封口过程中保证了同步折边,以提升产品包装美观度。包装平台、完成品平台通过伺服控制实现不同直径产品中心高自动匹配;通过可调节式悬浮内撑机构,配和外部伺服自动调节系统,实现不同规格薄膜开口;通过伺服系统控制卷膜轮、送膜轮、助力轮、重力轮联动、实现精准稳定送膜。同时优化薄膜拉伸过程中受力分布,提升包装的密封性和美观性。
118.本生产线实现了分切机后段抽轴,贴胶带,穿纸管,套袋,抽真空,称重,贴标的全部自动化。把工人从重复繁重的工作中解放出来,仅需在系统上输入产品数据即可;解决了长期困扰本行业的劳动强度高、效率低等问题;采取冷拉伸套膜包装形式,彻底解决了运输过程中产品受潮报废问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1