一种机器视觉茶枝柑姿态识别和自动调整装置
1.本发明属于农业机械领域,具体涉及一种机器视觉茶枝柑姿态识别和自动调整装置。
背景技术:
2.茶枝柑隶属于芸香料、柑橘属,植物体为小乔木。茶枝柑的深加工产品主要为“广陈皮”,其有很高的药性和保健效果,具有理气健脾、燥湿化痰等功效。近几年广陈皮产业规模快速增长,对广陈皮加工装备自动化提出了更高的要求。在茶枝柑开皮生产时,一般先将茶枝柑果柄朝上或朝下,然后用二刀法或三刀法开皮,使茶枝柑开皮后果蒂完整,并保留果柄。如专利(cn110089765a)公开了一种广陈皮用柑橘自动化剥皮机,可以将柑橘的果皮按照三瓣或四瓣的形式完整剥下;但是该装置未对果柄进行位置识别及姿态调整,茶枝柑果柄位置存在随机性,对茶枝柑开皮时可能使果蒂破损或果柄易使开皮刀具损坏,无法满足广陈皮的初加工技术要求。目前,应用于茶枝柑初加工的机械装置中,主要采用人工的方式完成茶枝柑果柄定位及姿态调整,直接影响初加工的效率与质量。可见,茶枝柑开皮的果柄定位及姿态调整是限制广陈皮初加工全自动化的瓶颈问题。
技术实现要素:
3.本发明的目的在于克服现有技术中存在的缺点,提供一种机器视觉茶枝柑姿态识别和自动调整装置,该装置在茶枝柑开皮上料前,通过姿态识别与自动调整,使得茶枝柑的果柄位于果实投影几何中心,提高茶枝柑初加工的生产效率与加工质量,降低劳动成本。
4.本发明的目的通过下述技术方案实现:
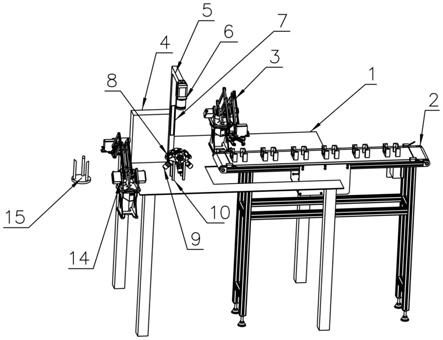
5.一种机器视觉茶枝柑姿态识别和自动调整装置,包括运送系统、视觉定位系统和茶枝柑姿态调整系统;所述运送系统包括依次布置的水平传送带2、上料机械手3、下料机械手14、开皮工位15,上料机械手3、下料机械手14分别安装在定位装置支架10的两侧,上料机械手3用于将待调整姿态的茶枝柑夹取到定位装置支架10,下料机械手14用于把位于定位装置支架10上的已调整好姿态的茶枝柑夹取置于开皮工位15上;所述视觉定位系统安装在工作架1上;所述茶枝柑姿态调整系统包括定位驱动轮8、驱动电机9、定位装置支架10、控制器11、电机驱动器12,定位装置支架10固定安装在工作架1上且位于视觉定位系统的正下方,一组四个定位驱动轮8倾斜安装在定位装置支架10的外表面,每个定位驱动轮8都有对应的驱动电机9,驱动电机9安装在定位装置支架10的内表面,驱动电机9的轴通过轴连器连接定位驱动轮8,驱动电机9通过导线连接对应电机驱动器12,电机驱动器12通过导线连接控制器11,控制器11与微处理器13通过导线连接。控制器11、电机驱动器12、微处理器13放置在控制柜4中。
6.所述视觉定位系统包括相机支架5、相机6、光源7和微处理器13;相机6固定安装在相机支架5上且面向定位装置支架10;光源7安装在相机支架5上,用于减少由于自然光造成的反光和阴影而影响茶枝柑果柄位置获取;相机6通过导线与微处理器13相连接。
7.所述机器视觉茶枝柑姿态识别和自动调整装置的应用,如图7所示,包括下述步骤:
8.(1)启动装置后,茶枝柑落入水平传送带2的卡座上,当茶枝柑传送到水平传送带2的末端时,上料机械手3夹取茶枝柑放置到定位装置支架10上;
9.(2)当茶枝柑位于定位装置支架10上时,触发相机6并抓取一帧静态图像,实现茶枝柑表面图像采集;
10.(3)以定位装置支架的正中心为原点建立视觉定位二维坐标系,静态图像通过灰度、二值化、中值滤波的处理后提取茶枝柑特征,然后经过微处理器13处理得到茶枝柑果柄的二维坐标信息,并将二维坐标信息传递给控制器11;
11.(4)如果得到的图像中无有效果柄坐标信息即果柄不在相机视角的区域内,控制器11将控制电机驱动器12以使驱动电机9工作,使得位于定位驱动轮8上面的茶枝柑的果柄位置翻转;同时相机6连续获取多帧图像,由微处理器13处理并提取茶枝柑果柄的二维坐标信息,反馈果柄坐标给控制器11,控制器11再次验证茶枝柑果柄是否位于视觉定位二维坐标系原点位置,若茶枝柑果柄不在视觉定位二维坐标系原点位置,控制器11继续控制电机驱动器12使驱动电机9工作,使位于定位驱动轮8上面的茶枝柑的果柄改变位置,从而形成一种视觉反馈,最终使得茶枝柑果柄位于视觉定位二维坐标系原点位置;
12.(5)茶枝柑果柄朝上时,姿态调整完毕,下料机械手14将姿态调整好的茶枝柑夹取放置在开皮工位15上。
13.更为具体的,茶枝柑姿态调整系统的工作步骤如下:首先通过微处理器13判断是否获取到有效茶枝柑果柄的二维坐标信息即茶枝柑果柄是否处于相机视角内或坐标区域18内;若不在坐标区域18内,控制器11将控制驱动电机9工作,使茶枝柑姿态翻转即茶枝柑果柄出现在相机视角内或坐标区域18内;若获取到有效茶枝柑果柄的二维坐标信息即茶枝柑果柄处于相机视角内或坐标区域18内,相机6将获取到有效的果柄二维坐标信息[a,b];当茶枝柑果柄位于坐标区域a18
‑
1时即果柄二维坐标满足时,定位驱动轮8逆时针转动,茶枝柑表面有接触的定位驱动轮8使茶枝柑水平圆周转动,茶枝柑果柄将向x轴运动,此刻提取的果柄二维坐标信息为[a1,0],此时定位驱动轮a8
‑
1与定位驱动轮b8
‑
2顺时针运动,定位驱动轮c8
‑
3与定位驱动轮d8
‑
4逆时针运动,直至提取到的茶枝柑果柄坐标信息为[0,0];当茶枝柑果柄位于坐标区域b18
‑
2时即坐标满足时时,定位驱动轮8顺时针转动,茶枝柑表面有接触的定位驱动轮8使茶枝柑水平圆周转动,茶枝柑果柄将向y轴运动,当提取的茶枝柑果柄二维坐标信息为[0,b1],此时定位驱动轮a8
‑
1与定位驱动轮d8
‑
4逆时针运动,定位驱动轮b8
‑
2与定位驱动轮c8
‑
3顺时针运动,直至提取到的茶枝柑果柄坐标信息为[0,0];当茶枝柑果柄位于坐标区域c18
‑
3时即果柄二维坐标满足时,定位驱动轮8逆时针转动,茶枝柑表面有接触的定位驱动轮8使茶枝柑水平圆周转动,茶枝柑果柄将向y轴运动,此刻提取的果柄二维坐标信息为[0,b2],此时定位驱动轮b8
‑
2与定位驱动轮c8
‑
3顺时针运动,定位驱动轮a8
‑
1与定位驱动轮d8
‑
4逆时针运动,直至提取到的茶枝柑果柄坐标信息为[0,0];当
茶枝柑果柄位于坐标区域d18
‑
4时即果柄二维坐标满足时,定位驱动轮8顺时针转动,茶枝柑表面有接触的定位驱动轮8使茶枝柑水平圆周转动,茶枝柑果柄将向x轴运动,此刻提取的果柄二维坐标信息为[a2,0],此时定位驱动轮a8
‑
1与定位驱动轮b8
‑
2逆时针运动,定位驱动轮c8
‑
3与定位驱动轮d8
‑
4顺时针运动,直至提取到的茶枝柑果柄坐标信息为[0,0];当茶枝柑果柄位于坐标区域e18
‑
5时即果柄二维坐标满足时,定位驱动轮8逆时针转动,茶枝柑表面有接触的定位驱动轮8使茶枝柑水平圆周转动,茶枝柑果柄将向x轴运动,此刻提取的果柄二维坐标信息为[a3,0],此时定位驱动轮c8
‑
3与定位驱动轮d8
‑
4顺时针运动,定位驱动轮a8
‑
1与定位驱动轮b8
‑
2逆时针运动,直至提取到的茶枝柑果柄坐标信息为[0,0];当茶枝柑果柄位于坐标区域f18
‑
6时即果柄二维坐标满足时,定位驱动轮8顺时针转动,茶枝柑表面有接触的定位驱动轮8使茶枝柑水平圆周转动,茶枝柑果柄将向y轴运动,此刻提取的果柄二维坐标信息为[0,b3],此时定位驱动轮a8
‑
1与定位驱动轮d8
‑
4顺时针运动,定位驱动轮c8
‑
3与定位驱动轮b8
‑
2逆时针运动,直至提取到的茶枝柑果柄坐标信息为[0,0];当茶枝柑果柄位于坐标区域g时即果柄二维坐标满足时,定位驱动轮8逆时针转动,茶枝柑表面有接触的定位驱动轮8使茶枝柑水平圆周转动,茶枝柑果柄将向y轴运动,此刻提取的果柄二维坐标信息为[0,b4],此时定位驱动轮a8
‑
1与定位驱动轮d8
‑
4顺时针运动,定位驱动轮c8
‑
3与定位驱动轮b8
‑
2逆时针运动,直至提取到的茶枝柑果柄坐标信息为[0,0];当茶枝柑果柄位于坐标区域h18
‑
8时即果柄二维坐标满足时,定位驱动轮8顺时针转动,茶枝柑表面有接触的定位驱动轮8使茶枝柑水平圆周转动,茶枝柑果柄将向x轴运动,此刻提取的果柄二维坐标信息为[a4,0],此时定位驱动轮a8
‑
1与定位驱动轮b8
‑
2顺时针运动,定位驱动轮c8
‑
3与定位驱动轮d8
‑
4逆时针运动,直至提取到的茶枝柑果柄坐标信息为[0,0]。
[0014]
茶枝柑姿态调整系统的工作原理:如图3、5所示,茶枝柑姿态调整系统包括四个可主动驱动的定位驱动轮a8
‑
1、定位驱动轮b8
‑
2、定位驱动轮c8
‑
3、定位驱动轮d8
‑
4;由于大部分茶枝柑外形状呈椭圆形,通过轮动调整茶枝柑姿态时可能会存在无法接触茶枝柑表面从而无法形成摩擦力,通过控制四个可主动驱动的定位驱动轮8的转动,当一个定位驱动轮8没有接触茶枝柑表面时,通过其它三个定位驱动轮8可调整茶枝柑果柄位置;即当控制器11控制驱动电机12使定位驱动轮a8
‑
1、定位驱动轮b8
‑
2、定位驱动轮c8
‑
3、定位驱动轮d8
‑
4相同速度同时正向转动或反向转动,当定位驱动轮a8
‑
1与定位驱动轮c8
‑
3同速同向转动或定位驱动轮b8
‑
2与定位驱动轮d8
‑
4同速同向转动,此时茶枝柑垂直方向受力近似为零,水平方向受力使茶枝柑姿态水平圆周转动;当一组相邻定位驱动轮分别朝不同方向同速转动,例如定位驱动轮a8
‑
1和定位驱动轮b8
‑
2不同方向同速转动、定位驱动轮b8
‑
2与定位驱动轮c8
‑
3不同方向同速转动等情况,使茶枝柑受到垂直方向分力,使茶枝柑姿态垂直方向圆周运动;当相邻的定位驱动轮8以不同速度同向运动时,茶枝柑同时受到水平方向和垂直方向的力,茶枝柑向合成力的方向运动。通过以上的运动方式,可以有效控制调整茶枝柑果
柄位置,完成茶枝柑果柄姿态识别和自动调整工作。
[0015]
本发明与现有技术相比具有如下优点和效果:
[0016]
(1)本发明的机器视觉茶枝柑姿态识别和自动调整装置,可以准确调整茶枝柑果柄的相对位置,使加工出来的果皮果蒂完整性更好,同时降低开皮刀具的损耗,提高茶枝柑初加工生产效率,降低劳动成本。
[0017]
(2)定位驱动轮的使用可以有效保护茶枝柑外表皮不被损坏,有利于提高广陈皮产品的外观品质。
附图说明
[0018]
图1为机器视觉茶枝柑姿态识别和自动调整装置的立体结构示意图。
[0019]
图2为机器视觉茶枝柑姿态识别和自动调整装置的后视图。
[0020]
图3为茶枝柑姿态调整系统的结构示意图。
[0021]
图4为茶枝柑姿态调整系统的爆炸视图。
[0022]
图5为茶枝柑姿态调整系统的直角坐标系示意图。
[0023]
图6为机械手的结构示意图。
[0024]
图7为机器视觉识别果柄的流程图。
[0025]
图8为机器视觉茶枝柑姿态识别和自动调整装置的主视图。
[0026]
其中,1、工作架;2、水平传送带;3、上料机械手;4、控制柜;5、相机支架;6、相机;7、光源;8、定位驱动轮;8
‑
1、定位驱动轮a;8
‑
2、定位驱动轮b;8
‑
3、定位驱动轮c;8
‑
4、定位驱动轮d;9、驱动电机;10、定位装置支架;11、控制器;12、电机驱动器;13、微处理器;14、下料机械手;15、开皮工位;16待调整茶枝柑;17、调整后茶枝柑;18、坐标区域。
具体实施方式
[0027]
为了便于理解本发明,下面将结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但是,不以任何形式限制本发明。应该指出的是,对本领域的技术人员来说,在不脱离本发明构思的前提下,本发明还可以做出若干变形和改进,这些都属于本发明的保护范围。
[0028]
实施例1
[0029]
一种机器视觉茶枝柑姿态识别和自动调整装置,如图1、图2所示,包括工作架1、水平传送带2、上料机械手3、控制柜4、相机支架5、相机6、光源7、定位驱动轮8、驱动电机9、定位装置支架10、控制器11、电机驱动器12、微处理器13、下料机械手14、开皮工位15。其中,所述运送系统包括依次布置的水平传送带2、上料机械手3(如图6所示)、下料机械手14、开皮工位15,上料机械手3、下料机械手14分别安装在定位装置支架10的两侧,上料机械手3用于将待调整姿态的茶枝柑夹取到定位装置支架10,下料机械手14用于把位于定位装置支架10上的已调整好姿态的茶枝柑夹取置于开皮工位15上。所述视觉定位系统包括相机支架5、相机6、光源7和微处理器13;相机6固定安装在相机支架5上且面向定位装置支架10;光源7安装在相机支架5上,用于减少由于自然光造成的反光和阴影而影响茶枝柑果柄位置获取;相机6通过导线与微处理器13相连接。如图3、图4所示,所述视觉定位系统安装在工作架1上;所述茶枝柑姿态调整系统包括定位驱动轮8、驱动电机9、定位装置支架10、控制器11、电机
驱动器12,定位装置支架10固定安装在工作架1上且位于视觉定位系统的正下方,一组四个定位驱动轮8倾斜安装在定位装置支架10的外表面,每个定位驱动轮8都有对应的驱动电机9,驱动电机9安装在定位装置支架10的内表面,驱动电机9的轴通过轴连器连接定位驱动轮8,驱动电机9通过导线连接对应电机驱动器12,电机驱动器12通过导线连接控制器11,控制器11与微处理器13通过导线连接。控制器11、电机驱动器12、微处理器13放置在控制柜4中。
[0030]
所述定位驱动轮8为非光滑的轮式结构,驱动电机9为涡轮蜗杆结构,定位驱动轮8通过螺栓固定轴连机构,再与驱动电机9的轴固定连接,驱动电机9通过螺栓安装在定位装置支架10的内表面,定位驱动轮8的位置相对于定位装置支架10外表面平行,与定位装置支架10外表面有固定角度差范围在15
°
~60
°
内。
[0031]
操作时,如图8所示,启动设备,茶枝柑落入水平传送带2的卡座上,当茶枝柑即将到达水平传送带2末端后,水平传送带2缓慢减速至停止工作,上料机械手3夹取茶枝柑放置在定位装置支架10上,当茶枝柑位于定位装置支架10上时,触发相机6并抓取一帧静态图像,完成茶枝柑表面图像采集,背光源7提供光源,减少由于自然光造成的反光和阴影而影响茶枝柑果柄位置获取。以定位装置支架正中心为为原点建立视觉定位二维坐标系,静态图像通过灰度、二值化、中值滤波等处理后提取茶枝柑特征,然后经过微处理器13处理得出茶枝柑果柄的二维坐标信息,并将二维坐标信息传递给控制器11,控制器11接收信息后,控制电机驱动器12使驱动电机9工作,驱动定驱动轮8,使接触定位驱动轮8上面的茶枝柑的果柄改变位置,驱动电机9停止工作后,相机6继续触发并抓取一帧静态图像,由微处理器13将处理得出的茶枝柑果柄的二维坐标信息发送给控制器11,控制器11验证茶枝柑果柄是否位于视觉定位二维坐标系原点位置,若茶枝柑果柄不在视觉定位二维坐标系原点位置,控制器11继续控制电机驱动器12使驱动电机9工作,驱动定位驱动轮8,使位于定位驱动轮8上面的茶枝柑的果柄改变位置,从而形成一种视觉反馈,最终促使茶枝柑果柄位于视觉定位二维坐标系原点位置。茶枝柑果柄朝上时即姿态调整完毕时,下料机器手14工作,将姿态调整好的茶枝柑夹取放置在开皮工位15上。
[0032]
以上所述仅为本发明的实施例,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1