一种蒸发器载体复合定位夹取机构的制作方法
1.本发明涉及工装夹具技术领域,特别是一种蒸发器载体复合定位夹取机构。
背景技术:
2.空调中蒸发器应用已经普遍化,结构是由铜管和铝纤维合金、翅片等主要材质做成的,翅片与翅片之间都是堆叠而成并套有多根钢管,一达到换热效率,同时存在较大的空隙,普通的真空、强磁吸附无法达到满足生产应用。
3.同时蒸发器体积大、较重,员工劳动强度答,人工搬运容易产生翅片倒片导致质量异常,进而导致产品报废,这一问题给搬运工序带来较大难度,利用人力劳动搬运蒸发器,效率低,无法高效完成,对下一工序存在较大的延误。
技术实现要素:
4.为了克服现有技术的上述缺点,本发明的目的是提供一种能够利用工装板为载体运输过程中产品不易滑脱,结构稳定可靠,降低员工劳动强度,提高产品质量,优化生产工艺流程,提高生产节拍的蒸发器载体复合定位夹取机构。
5.本发明解决其技术问题所采用的技术方案是:
6.一种蒸发器载体复合定位夹取机构,包括用于夹持蒸发器的夹具本体,所述夹具与搬运机器臂相连,所述夹具包括夹持组件、滑动组件,所述夹持组件安装在所述滑动组件上,所述滑动组件用于滑动调整所述夹持组件位置,所述蒸发器载体复合定位夹取机构还包括搬运载体,所述搬运载体包括搬运组件、防滑组件,所述搬运载体用于放置蒸发器,所述搬运组件用于被所述夹持组件夹持搬运搬运载体,所述防滑组件用于增大蒸发器与工装板摩擦力。
7.作为本发明的进一步改进:所述夹具还包括法兰盘和固定组件,所述夹持组件和滑动组件与固定组件连接,所述固定组件通过法兰盘与搬运机械臂连接。
8.作为本发明的进一步改进:所述固定组件设有连接架和支架,所述法兰盘装配在所述连接架上,所述支架两端上侧设有滑轨,所述连接架横向与支架设有滑轨的两侧固定连接。
9.作为本发明的进一步改进:所述滑动组件包括l型固定板,所述l型固定板呈倒l形状安装在支架上,所述l型固定板与支架的连接处设有滑轮,所述滑轮装配在滑轨上。
10.作为本发明的进一步改进:所述夹持组件包括手夹式气缸、气缸固定板和夹指,所述气缸固定板设于支架下侧与l型固定板连接,所述手夹式气缸安装在l型固定板一端上,所述手夹式气缸还设于气缸固定板下侧与气缸固定板连接,所述夹指包括第一夹指和第二夹指,所述第一夹指与所述气缸固定板连接,所述第二夹指与所述手夹式气缸连接;
11.和/或,所述夹持组件还包括磁敏开关,所述磁敏开关用于判断夹指是否加持到位,所述磁敏开关与手夹式气缸连接。
12.作为本发明的进一步改进:所述搬运载体还包括工装板,所述搬运组件装配在所
述工装板上。
13.作为本发明的进一步改进:所述搬运组件包括l型支条、立板、挡块和夹件,所述立板安装在所述工装板上,所述l型支条设于立板两侧与工装板连接,所述挡块与立板一侧连接。
14.作为本发明的进一步改进:所述夹件一端通过螺丝螺帽配合安装在所述立板上,所述夹件呈f状,所述夹件开口朝向两侧。
15.作为本发明的进一步改进:所述防滑组件设于立板表面及工装板表面。
16.作为本发明的进一步改进:所述防滑组件包括聚氨酯材质的优力胶。
17.一种蒸发器载体复合定位夹取方法,采用如上所述的蒸发器载体复合定位夹取机构,包括以下步骤
18.s1、机械臂移动夹具到搬运载体上;
19.s2、手夹式气缸驱动夹指夹动夹件,磁敏开关判断夹指是否加持到位;
20.s3、手夹式气缸上的磁敏开关判断夹指是否夹持到位,当夹持到位时,输出信号给机器人提示加紧到位,当未加紧到位时,输出信号给机器人提示未加紧到位,发出报警提示操作人员;
21.s4、夹具搬动搬运载体至下一工序位置。
22.与现有技术相比,本发明的有益效果是:
23.1.本发明提高了产量质量合格率,利用机械手、机器人等自动化设备可实现自动抓取,优化生产工艺流程,提高生产节拍,实现由人工搬运到自动化。
24.2.本发明采用整体为双u型设计,工装板底部均设有软性材料,增大蒸发器与工装板摩擦力,保证夹具斑鱼过程中的稳定性以及减少翅片变形的问题,且挡板可调节空间大小,保证产品不受体积大小无法放置。
附图说明
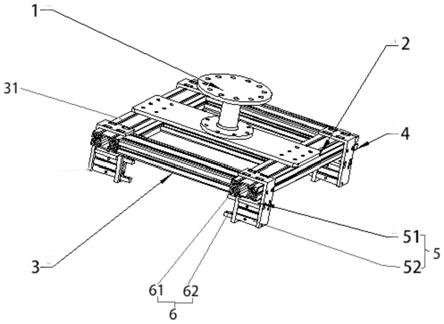
25.图1为本发明的夹具结构示意图。
26.图2为本发明的搬运载体结构示意图。
27.图3为本发明的搬运载体侧视图。
具体实施方式
28.现结合附图说明与实施例对本发明进一步说明:
29.本发明的详细描述:
30.一种蒸发器载体复合定位夹取机构,包括用于夹持蒸发器的夹具本体,所述夹具与搬运机器臂相连,所述夹具包括夹持组件5、滑动组件,所述夹持组件5安装在所述滑动组件上,所述滑动组件用于滑动调整所述夹持组件5位置,所述蒸发器载体复合定位夹取机构还包括搬运载体,所述搬运载体包括搬运组件7、防滑组件,所述搬运载体用于放置蒸发器,所述搬运组件7用于被所述夹持组件5夹持搬运搬运载体,所述防滑组件用于增大蒸发器与工装板摩擦力。
31.所述夹具还包括法兰盘1和固定组件,所述夹持组件5和滑动组件与固定组件连接,所述固定组件通过法兰盘1与搬运机械臂连接,所述固定组件设有连接架2和支架3,所
述法兰盘1装配在所述连接架2上,所述支架3两端上侧设有滑轨31,所述连接架2横向与支架3设有滑轨31的两侧固定连接。
32.所述滑动组件包括l型固定板4,所述l型固定板4呈倒l形状安装在支架3上,所述l型固定板4与支架3的连接处设有滑轮,所述滑轮装配在滑轨31上。
33.所述夹持组件包括手夹式气缸52、气缸固定板51和夹指6,所述气缸固定板51设于支架3下侧与l型固定板4连接,所述手夹式气缸52安装在l型固定板4一端上,所述手夹式气缸52还设于气缸固定板51下侧与气缸固定板51连接,所述夹指6包括第一夹指61和第二夹指62,所述第一夹指61与所述气缸固定板51连接,所述第二夹指62与所述手夹式气缸52连接;
34.和/或,所述夹持组件5还包括磁敏开关,所述磁敏开关用于判断夹指是否加持到位,所述磁敏开关与手夹式气缸51连接。
35.所述搬运载体还包括工装板8,所述搬运组件7装配在所述工装板8上,所述搬运组件7包括l型支条71、立板73、挡块72和夹件74,所述立板73安装在所述工装板8上,所述l型支条71设于立板73两侧与工装板8连接,所述挡块72与立板73一侧连接,所述夹件74一端通过螺丝螺帽配合安装在所述立板73上,所述夹件74呈f状,所述夹件74开口朝向两侧。
36.作为本发明的进一步改进:所述防滑组件设于立板73表面及工装板8表面,所述防滑组件包括聚氨酯材质的优力胶。
37.一种蒸发器载体复合定位夹取方法,采用如上所述的蒸发器载体复合定位夹取机构,包括以下步骤
38.s1、机械臂移动夹具到搬运载体上;
39.s2、手夹式气缸52驱动夹指6夹动夹件,磁敏开关判断夹指6是否加持到位;s3、手夹式气缸52上的磁敏开关判断夹指6是否夹持到位,当夹持到位时,输出信号给机器人提示加紧到位,当未加紧到位时,输出信号给机器人提示未加紧到位,发出报警提示操作人员;
40.s4、夹具搬动搬运载体至下一工序位置。
41.实施案例一:
42.图1中,法兰盘1作为连接机构,安装在机械臂或机器人上面作为执行器,避免u型夹具与机械手动作过程中产生干涉现象,连接架2连接u型夹具的支架3和法兰盘1使其u型框架夹具左右两端保持平稳一致高度,手夹式气缸52笃定在l型笃定班4与气缸固定板51上面形成一个l型固定模式,安全牢固,能左右上下调节灵活运用,手夹式气缸52驱动夹指6夹动搬运载体中搬运组件7。
43.图2中,搬运载体呈现u型框架形状,四个立板73表面及工装板8底部均设有软性材料,避免产品滑动、变形等。立板73左右增加l型支条71,增加三角形加强筋条保证定位平稳可靠,u型搬运载体的夹件74材料使用硬性材料,保证耐久常用不变形。
44.该蒸发器生产运输方式采用工装板8作为载体,采用优力胶增加蒸发器翅片表面摩擦力、减少翅片的变形,采用气动夹具可以通过调节气压大小来调节夹持力,手夹式气缸52上可安装磁敏开关判断夹指6是否夹持到位,当夹持到位输出信号给机器人提示加紧到位,当未加紧到位也输出信号给机器人提示未加紧到位,发出报警提示操作人员,该夹具可满足负载20公斤以上所有机器人型号,实现自动搬运码垛拆跺。
45.综上所述,本领域的普通技术人员阅读本发明文件后,根据本发明的技术方案和
技术构思无需创造性脑力劳动而作出其他各种相应的变换方案,均属于本发明所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1