一种基于机械夹爪的批量清洗输送机构的制作方法
1.本发明属于零件加工技术领域,具体涉及一种基于机械夹爪的批量清洗输送机构。
背景技术:
2.现有技术中,需要加工生产如图2和图3所示两种规格汽车后桥零件,两种规格尺寸接近,约为长1.1m
×
宽0.6m
×
高0.23m,毛坯重量约16kg,机加成品重量约14.5kg。目前一般采用人工抱抬的方式或人工操作助力机械手的方式进行后桥批量清洗时的上下料转运操作。
3.针对人工抱或抬的方式进行后桥检测时的上下料转转运操作,存在缺点:后桥体积较大,重量比较重,人工抱抬劳动强度大,安全隐患高;工作效率低;零件姿态变换困难;人工取放料及转移过程中容易出现零件与数控机床或机床的夹具发生碰撞,导致相应的损伤;人力成本高,人员流失率高,工作意愿低;作业一致性以及上下料装配精度难以保证,影响机加品质;工作环境较差;不适合批量性生产及多种规格共线生产;占用场地大。
4.针对人工操作单独的助力机械臂或者桁架助力机械臂来实现后桥检测时的上下料转运操作,存在缺点:后桥体积较大,重量比较重,上下料及转移过程中人的视野受到极大影响,容易出现零件与数控机床或机床夹具发生碰撞,导致相应的损伤,导致成本提高;人工操作助力机械臂进行上下料及转移,安全隐患较大;操作繁琐,作业效率低;工序切换,零件姿态变换不便;人力投入成本高,人员流失率高,工作意愿低;占地面积大;助力机械臂及其夹爪柔性不够,难以满足多产品、多机台模组化运用;劳动强度大,容易产生工伤事故,效率也比较低下,且使用人工上下料的产品质量的稳定性不够,不能满足大批量生产的需求;不适合批量性生产及多种规格共线生产。
5.有鉴于此,有必要提供一种基于机械夹爪的批量清洗输送机构,便于进行后桥批量清洗时的上下料转运操作。
技术实现要素:
6.本发明的目的在于克服现有技术中存在的上述问题,提供一种基于机械夹爪的批量清洗输送机构。
7.为实现上述技术目的,达到上述技术效果,本发明是通过以下技术方案实现:
8.一种基于机械夹爪的批量清洗输送机构,包括输送框架,所述输送框架的上料端前侧设有三轴机械搬运系统,所述三轴机械搬运系统包括横向移动机构、纵向移动机构、竖向移动机构、翻转机构和机械夹爪,所述横向移动机构的活动部安装有纵向移动机构,所述纵向移动机构的活动部安装有竖向移动机构,所述竖向移动机构的活动部通过翻转机构安装有用于装载后桥零件的机械夹爪;所述输送框架的上端对称设有两条循环输送带,所述输送框架靠近出料端处的上方安装有若干根用于对后桥零件进行喷淋清洗的喷淋清洗管,输送框架中部设有便于接料组件活动的活动腔,所述接料组件由循环输送带带动进行水平
位移。
9.进一步地,上述基于机械夹爪的批量清洗输送机构中,所述后桥零件共有两种规格,且两种后桥零件的模型重合后具有共同结构特征,所述共同结构特征包含三个v形槽、四个毛坯凸台和四个带端面的衬套孔。
10.进一步地,上述基于机械夹爪的批量清洗输送机构中,所述翻转机构包括与竖向移动机构的活动部固定的安装框架,所述安装框架的两侧板外壁分别安装有转动电机和电动推杆,所述转动电机的输出轴贯穿所在侧板后与翻转臂的内端一侧固连,所述翻转臂的内端另一侧设有带锁定孔的定位盘,所述翻转臂的外端设有便于安装机械夹爪的法兰盘,所述电动推杆的活动轴贯穿所在侧板后固定有带锁定柱的活动盘。
11.进一步地,上述基于机械夹爪的批量清洗输送机构中,所述锁定孔、锁定柱各自呈圈均匀分布,且位置一一对应。
12.进一步地,上述基于机械夹爪的批量清洗输送机构中,所述机械夹爪包括相固定的第一板体和第二板体,所述第二板体的中心处设有便于安装法兰盘的安装孔,所述第二板体围绕安装孔设置有拉压手爪、读码器、位置感应器、浮动支撑杆和吹气喷嘴i。
13.进一步地,上述基于机械夹爪的批量清洗输送机构中,所述拉压手爪包括气动推杆、连接环、滑杆、连接盘、防碰定位套管、液压杠杆式夹紧器,所述气动推杆固定在第一板体上,所述气动推杆的活动端固定有连接环,所述连接环和连接盘分布在第二板体的两侧,且两者通过贯穿第二板体的滑杆进行连接,所述连接盘的外侧固定有防碰定位套管和位于其内的液压杠杆式夹紧器。
14.进一步地,上述基于机械夹爪的批量清洗输送机构中,所述连接盘、防碰定位套管的中心轴线重合,所述连接盘的外径大于后桥零件中衬套孔的外径,所述连接盘相对于防碰定位套管外露的端面作为支撑端面。
15.进一步地,上述基于机械夹爪的批量清洗输送机构中,所述接料组件包括接料架体,所述接料架体的上侧设有平台,所述平台的中部设有带排水孔的接水槽,所述平台的下侧位于接水槽的两旁对称设有夹持块,所述夹持块中开设有便于夹持循环输送带带体的夹持孔,所述平台靠近四角处安装有弹性定位圆锥销、z向液压杠杆缸和吹气喷嘴ii。
16.进一步地,上述基于机械夹爪的批量清洗输送机构中,所述平台的上侧安装有接近感应器和用于区分两种规格后桥零件的后桥规格区分感应器。
17.进一步地,上述基于机械夹爪的批量清洗输送机构中,所述平台设有便于沥水流向接水槽的第一斜面,所述接水槽的底侧设有便于沥水流向排水孔的第二斜面,所述排水孔处安装有带排水阀的排水管。
18.本发明的有益效果是:
19.1、本发明各部件设计科学合理,通过各部件的协同配合,能够实现对汽车后桥零件批量清洗输送操作,清洗输送时,先利用三轴机械搬运系统将后桥零件放置在输送框架进料端处的接料组件上,再利用输送框架上的循环输送带带动接料组件位移至喷淋清洗管的下方,当清洗完成后利用循环输送带带动接料组件复位,再利用三轴机械搬运系统将将清洗之后的后桥零件搬运至质检台,即可完成一次清洗,通过这种方式很好解决了传统方案存在的劳动强度高、安全隐患大、效率低、品质稳定性差、人力投入高、工装环境恶劣等问题。
20.2、本发明中三轴机械搬运系统利用翻转机构和机械夹爪的协同配合,能够实现将后桥零件以多种角度进行放置,满足清洗工序不同体位的上料条件和下料需求,便于后续的各种质检操作。
21.当然,实施本发明的任一产品并不一定需要同时达到以上的所有优点。
附图说明
22.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
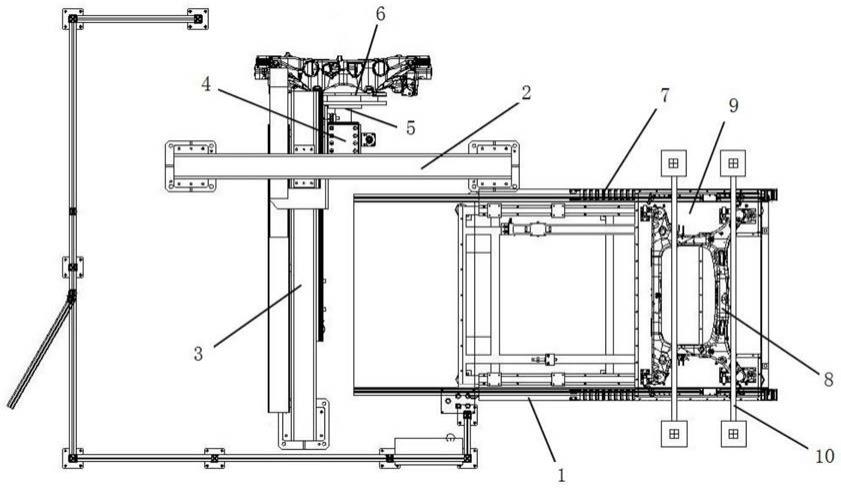
23.图1为本发明整体的结构示意图;
24.图2为本发明中后桥零件的第一种规格示意图;
25.图3为本发明中后桥零件的第二种规格示意图;
26.图4为两种后桥零件模型重合后的共同结构特征示意图;
27.图5为本发明中翻转机构的俯视示意图;
28.图6为本发明中翻转机构的部分结构示意图;
29.图7为本发明中机械夹爪的结构示意图;
30.图8为本发明中拉压手爪的结构示意图;
31.图9为本发明中接料组件的结构示意图;
32.附图中,各标号所代表的部件列表如下:
33.1-输送框架,2-横向移动机构,3-纵向移动机构,4-竖向移动机构,5-翻转机构,501-安装框架,502-转动电机,503-电动推杆,504-翻转臂,505-法兰盘,506-定位盘,507-锁定孔,508-活动盘,509-锁定柱,6-机械夹爪,601-第一板体,602-第二板体,603-安装孔,604-拉压手爪,605-读码器,606-位置感应器,607-浮动支撑杆,608-吹气喷嘴i,7-循环输送带,8-后桥零件,801-v形槽,802-毛坯凸台,803-衬套孔,9-接料组件,901-接料架体,902-夹持块,903-夹持孔,904-平台,905-弹性定位圆锥销,906-z向液压杠杆缸,907-吹气喷嘴ii,908-接近感应器,909-后桥规格区分感应器,10-喷淋清洗管。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
35.如图1所示,一种基于机械夹爪的批量清洗输送机构,包括输送框架1,输送框架1的上料端前侧设有三轴机械搬运系统。三轴机械搬运系统包括横向移动机构2、纵向移动机构3、竖向移动机构4、翻转机构5和机械夹爪6。横向移动机构2的活动部安装有纵向移动机构3,纵向移动机构3的活动部安装有竖向移动机构4,竖向移动机构4的活动部通过翻转机构5安装有用于装载后桥零件8的机械夹爪6。输送框架1的上端对称设有两条循环输送带7,输送框架1靠近出料端处的上方安装有若干根用于对后桥零件8进行喷淋清洗的喷淋清洗
管10,喷淋清洗管10的下侧均布有喷头。输送框架1中部设有便于接料组件9活动的活动腔,接料组件9由循环输送带7带动进行水平位移。
36.如图2-图4所示,后桥零件8共有两种规格,且两种后桥零件8的模型重合后具有共同结构特征,共同结构特征包含三个v形槽801、四个毛坯凸台802和四个带端面的衬套孔803。
37.如图5-图6所示,翻转机构5包括与竖向移动机构4的活动部固定的安装框架501,安装框架501的两侧板外壁分别安装有转动电机502和电动推杆503,转动电机502的输出轴贯穿所在侧板后与翻转臂504的内端一侧固连,翻转臂504的内端另一侧设有带锁定孔507的定位盘506。翻转臂504的外端设有便于安装机械夹爪6的法兰盘505,电动推杆503的活动轴贯穿所在侧板后固定有带锁定柱509的活动盘508。锁定孔507、锁定柱509各自呈圈均匀分布,且位置一一对应。当翻转臂504的位置由转动电机502带动调整完成后,利用电动推杆503带动活动盘508及其上的锁定柱509位移,锁定柱509卡入锁定孔507,将翻转臂504的位置锁定。
38.如图7所示,机械夹爪6包括相固定的第一板体601和第二板体602,第二板体602的中心处设有便于安装法兰盘505的安装孔603,第二板体602围绕安装孔设置有拉压手爪604、读码器605、位置感应器606、浮动支撑杆607和吹气喷嘴i608。
39.如图8所示,拉压手爪604包括气动推杆6041、连接环6042、滑杆6043、连接盘6044、防碰定位套管6045、液压杠杆式夹紧器6046,气动推杆6041固定在第一板体601上,气动推杆6041的活动端固定有连接环6042,连接环6042和连接盘6044分布在第二板体602的两侧,且两者通过贯穿第二板体602的滑杆6043进行连接,连接盘6044的外侧固定有防碰定位套管6045,防碰定位套管6045的内部安装有液压杠杆式夹紧器6046。连接盘6044、防碰定位套管6045的中心轴线重合,连接盘6044的外径大于后桥零件8中衬套孔803的外径,连接盘6044相对于防碰定位套管6045外露的端面作为支撑端面。
40.如图9所示,接料组件9包括接料架体901,接料架体901的上侧设有平台904,平台904的中部设有带排水孔的接水槽,平台904的下侧位于接水槽的两旁对称设有夹持块902,夹持块902中开设有便于夹持循环输送带7带体的夹持孔903,平台904靠近四角处安装有弹性定位圆锥销905、z向液压杠杆缸906和吹气喷嘴ii907。平台904的上侧安装有接近感应器908和用于区分两种规格后桥零件的后桥规格区分感应器909。平台904设有便于沥水流向接水槽的第一斜面,接水槽的底侧设有便于沥水流向排水孔的第二斜面,排水孔处安装有带排水阀的排水管。
41.本实施例各部件设计科学合理,通过各部件的协同配合,能够实现对汽车后桥零件批量清洗输送操作,清洗输送时,先利用三轴机械搬运系统将后桥零件8放置在输送框架1进料端处的接料组件9上,再利用输送框架1上的循环输送带7带动接料组件9位移至喷淋清洗管10的下方,当清洗完成后利用循环输送带7带动接料组件9复位,再利用三轴机械搬运系统将将清洗之后的后桥零件8搬运至质检台,即可完成一次清洗,通过这种方式很好解决了传统方案存在的劳动强度高、安全隐患大、效率低、品质稳定性差、人力投入高、工装环境恶劣等问题。
42.以上公开的本发明优选实施例只是利于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为具体实施方式。显然,根据本说明书的内容,可作很
多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1