无人自走车的倾角调整机构的制作方法
本发明涉及一种无人自走车的倾角调整机构,尤指一种于无人自走车上装设有倾角感测器于移动过程中感测坡道倾角并产生感测信号,感测信号经由控制器接收及做信号处理后传送控制信号,控制信号经由电驱动力源接收后驱动转轴产生旋动并通过该减速机降低旋动速度,与减速机连动的主动滚轮、复数从动滚轮通过钢索以使复数旋块于承载板底面二侧产生一推一拉力量,并以支轴与复数夹块为支点以调整承载板保持水平状态,以使承载板上的预设物件不致于因倾斜而滑落损毁,此种通过倾角感测器自动感测且即时修正承载板的机电整合模块,可因应厂房不同地形或路面障碍物做出最佳化调整,更可实现无人自动化制造工厂。
背景技术:
1、在半导体半成品的制造领域中,对于晶圆的传送乃为相当重要的一环。而如何实现自动化的控管乃属生产线上需要特别关注的重点。而复数片晶圆的体积与重量对于以人力搬运具有极大的负担,再加上晶圆厂制程步骤相当复杂及产品组合多样化。再者,不同产品之间也存在不同优先生产的问题,而频繁的搬运活动易造成人员身体的危害,同时也耗费大量时间成本。
2、为解决上述人力搬运的缺点,自动化物料搬运系统(automated materialhandling system,amhs)可视为最佳解决方案。在晶圆厂具有数种自动化物料搬运系统可供选择,其中包含:磁性导引无人搬运车(automated guided vehicle,agv)、有轨无人搬运车(rail-guided vehicles,rgv)、空中式无人搬运车(overhead shuttle,ohs)、悬吊式自动搬运车(overhead hoist transfer,oht),完全可以依照晶圆厂生产环境做最佳化的选择。
3、由于晶圆的主要原料是易脆化的硅化物或砷化镓,因此晶片在未封装保护的运送过程中,必须严格选择晶圆运送的方式及相关载具,方能确保晶圆生产合格率。于运送的过程中复数晶圆都放置于一个专用的晶片盒(wafer carrier)中,而晶片盒内具有复数个晶圆插槽(slot),以防止晶圆歪斜、相迭或正反面错置等情形,而晶片盒需通过一运送台车〔例如:磁性导引无人搬运车(automated guided vehicle,agv)〕送往生产线进行加工作业,运送台车于移动过程中,常因厂房坡道倾斜造成颠簸造成晶片盒滑移,更严重时将导致晶片盒自运送台车掉落而毁损晶圆,而前述现有晶圆盒于通过台车运送所产生的种种缺失,有待从事此行业者加以改进。
技术实现思路
1、因此,本发明人有鉴于上述的问题与缺失,乃搜集相关资料,经由多方评估及考量,始设计出此种无人自走车的倾角调整机构的发明诞生。
2、为实现上述目的,本发明采用的技术方案是:
3、一种无人自走车的倾角调整机构,其特征在于,包括:
4、一底板,其组装于该无人自走车的顶面;
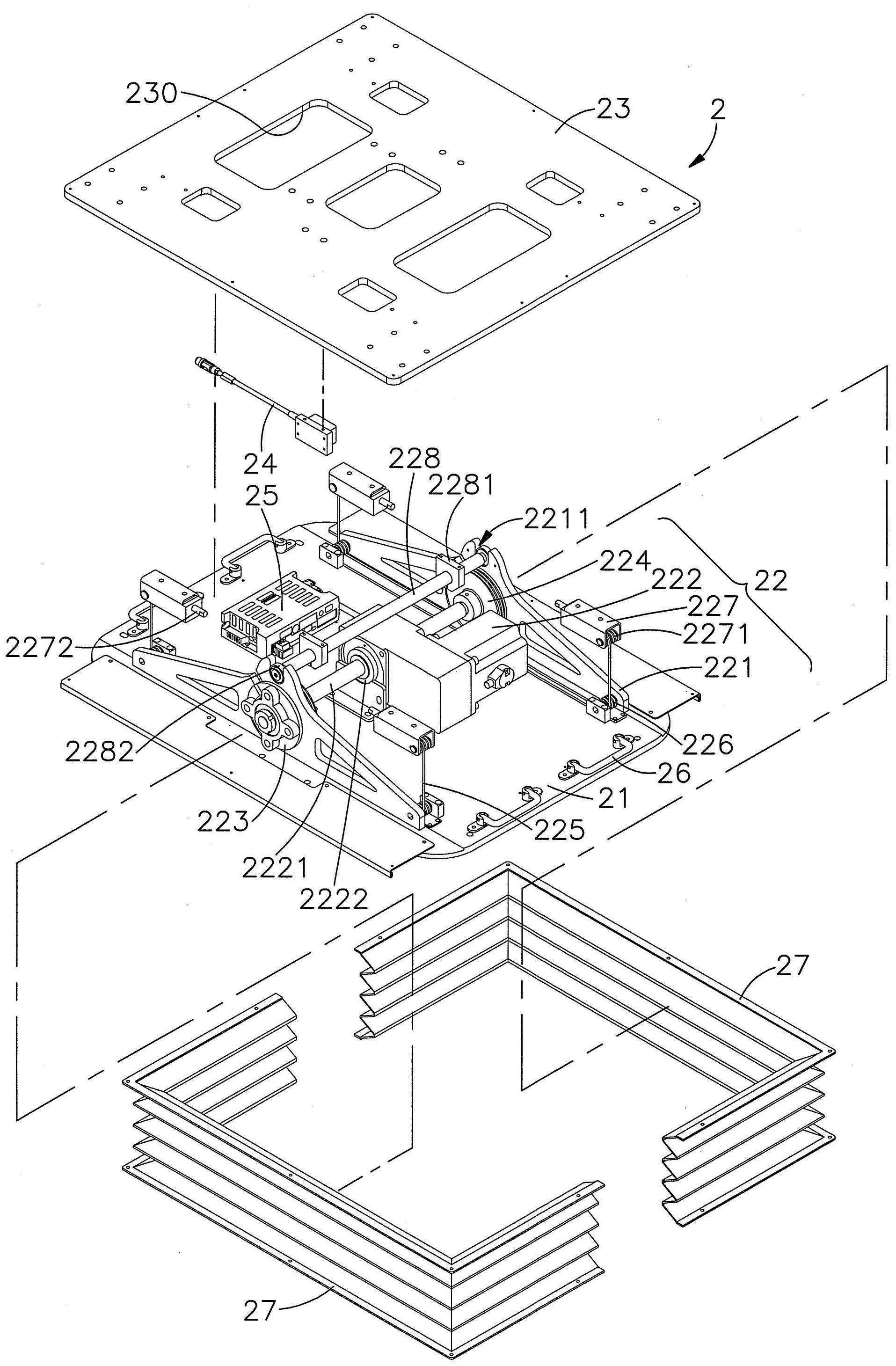
5、一卷索调整器,其包括各设于该底板表面二侧的一支架,且二支架之间设有一电驱动力源,该电驱动力源中穿置有连接于该二支架的一转轴,且该电驱动力源对应该转轴处设有一减速机,于该减速机连接于该二支架处各设有一主动滚轮,且二主动滚轮上各卷绕有一钢索,而该二支架在二侧处各设有供该钢索卷绕并产生转向的一从动滚轮,卷绕于该从动滚轮的该钢索二端各向上连接于一旋块,该二支架于中心顶侧处穿设有一支轴,该支轴固定有复数夹块;
6、一承载板,其底侧与该旋块及该复数夹块组装固定,该承载板依据该旋块所产生推拉力量并以该支轴及该复数夹块为支点以形成倾斜状态,而该承载板顶面装载有一预设物件;以及
7、一倾角感测器及一控制器,二者固设于该底板与该承载板之间且与该电驱动力源形成电性连接,而该倾角感测器在该无人自走车于移动过程中侦测坡道倾角并产生一感测信号,该感测信号经由该控制器接收及做信号处理后传送一控制信号,该控制信号经由该电驱动力源接收后驱动该转轴产生旋动并通过该减速机降低旋动速度,与该减速机连动的该二主动滚轮、该从动滚轮通过该钢索以使该旋块在该承载板底面二侧产生一推一拉的力量,并以该支轴与该复数夹块为支点以调整该承载板保持水平状态,以使该承载板上的该预设物件不致于因倾斜而滑落损毁。
8、所述的无人自走车的倾角调整机构,其中:该倾角感测器是一加速度感测器、一重力开关或一陀螺仪。
9、所述的无人自走车的倾角调整机构,其中:该承载板中设有能够降低整体重量的复数透孔。
10、所述的无人自走车的倾角调整机构,其中:该底板表面设有可供手提的复数把手。
11、所述的无人自走车的倾角调整机构,其中:该底板与该承载板外缘组装有具有防水防尘功能的二弹性侧壳,该二弹性侧壳能够根据该承载板的倾斜状态产生一侧压缩、另一侧伸展的状态。
12、所述的无人自走车的倾角调整机构,其中:该电驱动力源是指一马达,且穿设于该马达的该转轴接合二支架处各设有一轴承。
13、所述的无人自走车的倾角调整机构,其中:该二支架顶侧各设有供该支轴嵌入定位的一u型槽,且该支轴二端外部与二u型槽接合处各设有一轴承。
14、所述的无人自走车的倾角调整机构,其中:该旋块内部空间设有供该钢索缠绕的一转向滚轮,且该旋块一侧锁合有供该钢索末端连接固定且能够调整松紧度的一张力调整螺栓。
15、所述的无人自走车的倾角调整机构,其中:该预设物件是指内部放置有复数晶圆的一晶圆盒。
16、本发明的主要优点在于提供一种无人自走车的倾角调整机构,通过倾角感测器自动感测且即时修正承载板的机电整合模块,可因应厂房不同地形或路面障碍物做出最佳化调整,更可实现无人自动化制造工厂。
技术特征:
1.一种无人自走车的倾角调整机构,其特征在于,包括:
2.如权利要求1所述的无人自走车的倾角调整机构,其特征在于:该倾角感测器是一加速度感测器、一重力开关或一陀螺仪。
3.如权利要求1所述的无人自走车的倾角调整机构,其特征在于:该承载板中设有能够降低整体重量的复数透孔。
4.如权利要求1所述的无人自走车的倾角调整机构,其特征在于:该底板表面设有可供手提的复数把手。
5.如权利要求1所述的无人自走车的倾角调整机构,其特征在于:该底板与该承载板外缘组装有具有防水防尘功能的二弹性侧壳,该二弹性侧壳能够根据该承载板的倾斜状态产生一侧压缩、另一侧伸展的状态。
6.如权利要求1所述的无人自走车的倾角调整机构,其特征在于:该电驱动力源是指一马达,且穿设于该马达的该转轴接合二支架处各设有一轴承。
7.如权利要求1所述的无人自走车的倾角调整机构,其特征在于:该二支架顶侧各设有供该支轴嵌入定位的一u型槽,且该支轴二端外部与二u型槽接合处各设有一轴承。
8.如权利要求1所述的无人自走车的倾角调整机构,其特征在于:该旋块内部空间设有供该钢索缠绕的一转向滚轮,且该旋块一侧锁合有供该钢索末端连接固定且能够调整松紧度的一张力调整螺栓。
9.如权利要求1所述的无人自走车的倾角调整机构,其特征在于:该预设物件是指内部放置有复数晶圆的一晶圆盒。
技术总结
本发明提供一种无人自走车的倾角调整机构,包括:底板,其组装于该无人自走车的顶面;卷索调整器,其包括支架、电驱动力源及穿设于其中的转轴、减速机、主动滚轮及其卷绕有钢索、从动滚轮、旋块及夹块;承载板,其底侧与该些旋块及该些夹块做一组装固定,该承载板依据该些旋块所产生推拉力量并以该支轴及该些夹块为支点以形成倾斜状态,而该承载板顶面装载有一预设物件;一倾角感测器及一控制器,二者固设于该底板与该承载板之间且与该电驱动力源形成电性连接。
技术研发人员:黄秋逢,李建莹,彭丽秋
受保护的技术使用者:阳程科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!