一种用于在多工位之间运输的过渡机构、过渡方法及系统与流程
本发明涉及自动搬运,尤其涉及一种用于在多工位之间运输的过渡机构、过渡方法及系统。
背景技术:
1、工业机器人是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力使得工业机器人的应用越来越广泛。工业机器人主要由执行机构、驱动机构和控制系统三大部分组成,控制系统用于控制驱动机构驱动执行机构完成各种转动、移动或复合运动来实现规定的动作,改变被夹持物件的位置和姿势。工件加工方式一般为多工序加工方式,因此在不同加工位进行不同工序的加工时需要多次变换夹持位置,但是夹持装置很容易因为放置位置的定位不准导致变换夹持位置后进行再次夹持时无法准确将工件放置在下一个加工位,降低工件的生产效率,影响工件的生产质量。
2、因此,需要提供一种可以准确并且顺利夹持工件在加工位之间切换并且可以实现自动化的过渡机构来解决上述技术问题。
技术实现思路
1、为了解决现有技术中的问题,本发明提供了一种用于在多工位之间运输的过渡机构、过渡方法及系统,具体地:
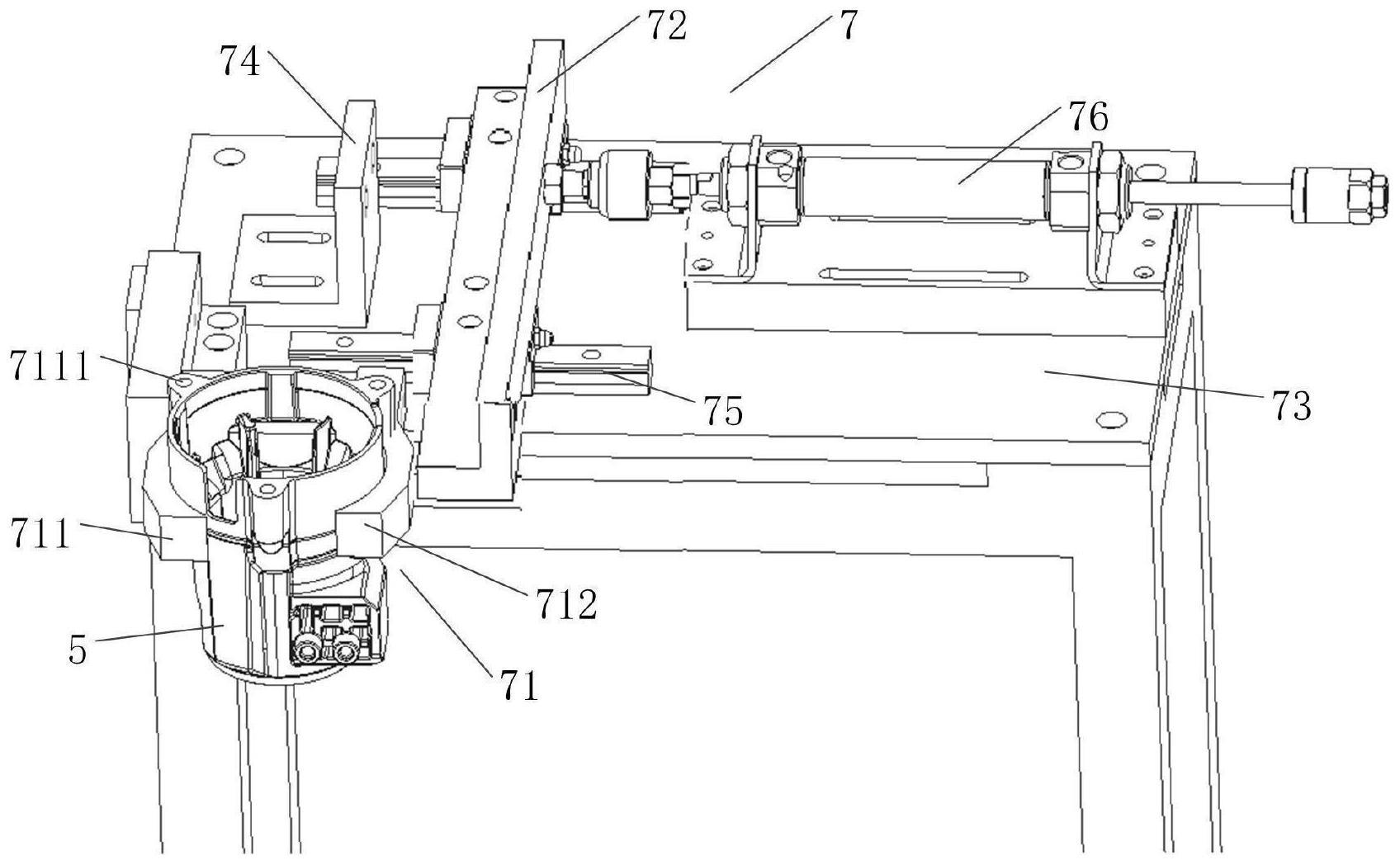
2、一方面提供了一种用于在多工位之间运输的过渡机构,包括夹紧机构、平移机构和固定座,所述平移机构相对于所述固定座可运动,所述夹紧机构包括第一夹紧件和第二夹紧件,所述第一夹紧件和所述第二夹紧件相向设置,所述第一夹紧件固定在所述固定座上,所述第二夹紧件和所述平移机构固定连接,所述平移机构用于带动所述第二夹紧件在第一位置和第二位置之间移动,所述第一夹紧件和所述第二夹紧件的上方均固定设有第一定位销,所述第一定位销和工件的定位孔匹配,当所述工件放置在所述第一夹紧件和所述第二夹紧件之间时,所述第一定位销插入对应的所述定位孔中,所述过渡机构用于和机器人和加工中心配合以使得所述机器人夹取位于加工中心的第一加工位中加工完成的工件的上方结构放置在所述过渡机构中再从所述过渡机构中夹取所述工件的下方结构放置在所述加工中心的第二加工位中。
3、另一方面提供了一种多工序自动化加工系统,包括上下料机、机器人、加工中心、控制器和上述的用于在多工位之间运输的过渡机构,所述控制器用于当多个所述第一夹具中的一个从所述加工中心的第一加工位中夹取加工完成的工件后控制夹取有待加工工件的另一个第一夹具切换至第一预设位置并将待加工工件放置在所述第一加工位中,再控制夹取到第一加工位中夹取加工完成的工件的第一夹具从所述过渡机构上方将所述工件放置在所述过渡机构中并控制所述第二夹具组件夹取从所述过渡机构下方夹取所述工件到达所述加工中心的第二加工位进行工件交换。
4、另一方面提供了一种用于多工序自动化加工系统的过渡方法,所述方法基于上述的用于在多工位之间运输的过渡机构实现的,包括:
5、控制机器人从加工中心的第一加工位中夹取加工完成的工件的上方结构并从所述过渡机构的上方将所述工件放置在过渡机构中;
6、控制机器人从所述过渡机构的下方夹取所述工件的下方结构;
7、控制平移机构带动第二夹紧件向远离第一夹紧件方向运动;
8、控制机器人将所述工件放置在所述加工中心的第二加工位中。
9、本发明提供的一种用于在多工位之间运输的过渡机构、过渡方法及系统,具有的有益效果为:
10、本发明通过设置过渡机构,使得通过平移机构带动第二夹紧件在第一位置和第二位置之间移动实现对工件的夹持和松开,使得当机器人从第一加工位夹取第一道工序加工完成的工件的上方结构后放置在过渡机构中,从而使得再从过渡机构中夹取工件的下方结构后可以精准放置在加工中心的第二加工位进行第二道工序的加工,实现了工件在加工位之间的准确搬运,提升了生产效率和生产质量,解决了容易因为放置位置的定位不准导致变换夹持位置后进行再次夹持时无法准确将工件放置在下一个加工位影响工件的生产效率的问题。
技术特征:
1.一种用于在多工位之间运输的过渡机构,其特征在于,包括夹紧机构(71)、平移机构(72)和固定座(73),所述平移机构(72)相对于所述固定座(73)可运动,所述夹紧机构(71)包括第一夹紧件(711)和第二夹紧件(712),所述第一夹紧件(711)和所述第二夹紧件(712)相向设置,所述第一夹紧件(711)固定在所述固定座(73)上,所述第二夹紧件(712)和所述平移机构(72)固定连接,所述平移机构(72)用于带动所述第二夹紧件(712)在第一位置和第二位置之间移动,所述第一夹紧件(711)和所述第二夹紧件(712)的上方均固定设有第一定位销(7111),所述第一定位销(7111)和工件(5)的定位孔(51)匹配,当所述工件(5)放置在所述第一夹紧件(711)和所述第二夹紧件(712)之间时,所述第一定位销(7111)插入对应的所述定位孔(51)中,所述过渡机构(7)用于和机器人(4)和加工中心(8)配合以使得所述机器人(4)夹取位于加工中心(8)的第一加工位中加工完成的工件(5)的上方结构放置在所述过渡机构(7)中再从所述过渡机构(7)中夹取所述工件(5)的下方结构放置在所述加工中心(8)的第二加工位中。
2.根据权利要求1所述的用于在多工位之间运输的过渡机构,其特征在于,所述第一夹紧件(711)和所述第二夹紧件(712)均为仿形结构,所述第一夹紧件(711)和所述第二夹紧件(712)靠近所述工件(5)一侧和所述工件(5)对应位置匹配。
3.根据权利要求2所述的用于在多工位之间运输的过渡机构,其特征在于,所述第一夹紧件(711)和所述第二夹紧件(712)靠近所述工件(5)一侧表面覆有非金属材料或所述第一夹紧件(711)和所述第二夹紧件(712)为非金属材料制成。
4.根据权利要求1所述的用于在多工位之间运输的过渡机构,其特征在于,所述机器人(4)包括多工序工件夹持装置和机械臂(41),所述多工序工件夹持装置包括多个第一夹具(1)、多个第二夹具(2)和转动连接件(3),所述第一夹具(1)和所述第二夹具(2)均和所述转动连接件(3)的一端固定连接,所述转动连接件(3)的另一端和所述机械臂(41)转动连接,所述转动连接件(3)围绕其轴向转动以完成所述第一夹具(1)或所述第二夹具(2)在第一预设位置的切换,当所述第一夹具(1)位于第一预设位置时用于夹取工件(5)的上方结构;当所述第二夹具(2)位于第一预设位置时用于夹取工件(5)的下方结构。
5.根据权利要求4所述的用于在多工位之间运输的过渡机构,其特征在于,所述第二夹具(2)包括第二驱动机构(202)和第二夹爪组件(201),所述第二驱动机构(202)和所述第二夹爪组件(201)驱动连接,所述第二夹爪组件(201)包括第四夹爪(2011)、第五夹爪(2012)和第六夹爪(2013),所述第四夹爪(2011)、所述第五夹爪(2012)和所述第六夹爪(2013)不呈旋转对称设置,所述第二驱动机构(202)用于在夹取工件(5)过程中驱动对应的所述第四夹爪(2011)、所述第五夹爪(2012)和所述第六夹爪(2013)同步在第三状态和第四状态之间切换。
6.根据权利要求5所述的用于在多工位之间运输的过渡机构,其特征在于,所述第一夹具(1)包括第一驱动机构(102)和第一夹爪组件(101),所述第一驱动机构(102)和所述第一夹爪组件(101)驱动连接,所述第一夹爪组件(101)包括第一夹爪(1011)、第二夹爪(1012)和第三夹爪(1013),所述第一夹爪(1011)、所述第二夹爪(1012)和所述第三夹爪(1013)呈旋转对称设置,所述第一驱动机构(102)用于在夹取工件(5)过程中驱动对应的所述第一夹爪(1011)、所述第二夹爪(1012)和所述第三夹爪(1013)同步在第一状态和第二状态之间切换。
7.一种用于多工序自动化加工系统的过渡方法,所述方法基于如权利要求1-6任一项所述的用于在多工位之间运输的过渡机构实现的,其特征在于,包括:
8.一种多工序自动化加工系统,其特征在于,包括上下料机(6)、机器人(4)、加工中心(8)、控制器和如权利要求4-6任一项所述的用于在多工位之间运输的过渡机构,所述控制器用于当多个所述第一夹具(1)中的一个从所述加工中心(8)的第一加工位中夹取加工完成的工件(5)后控制夹取有待加工工件(5)的另一个第一夹具(1)切换至第一预设位置并将待加工工件(5)放置在所述第一加工位中,再控制夹取到第一加工位中夹取加工完成的工件(5)的第一夹具(1)从所述过渡机构(7)上方将所述工件(5)放置在所述过渡机构(7)中并控制所述第二夹具(2)夹取从所述过渡机构(7)下方夹取所述工件(5)到达所述加工中心(8)的第二加工位进行工件(5)交换。
9.根据权利要求8所述的多工序自动化加工系统,其特征在于,所述上下料机(6)用于放置待加工工件(5)和加工完成的工件(5),所述控制器用于控制所述多工序工件夹持装置夹取所述上下料机(6)上待加工工件(5)后将所述加工中心(8)中加工完成的工件(5)放置在所述待加工工件(5)被拿取后空余的位置上。
10.根据权利要求9所述的多工序自动化加工系统,其特征在于,所述上下料机(6)上设有可拆卸的第三定位机构(61),所述第三定位机构(61)上固定设有第二定位销(611),所述第二定位销(611)和所述工件(5)的定位孔(51)匹配,待加工工件(5)放置在所述上下料机(6)上时所述第二定位销(611)穿入所述定位孔(51)中。
技术总结
本发明涉及一种用于在多工位之间运输的过渡机构、过渡方法及系统,包括夹紧机构、平移机构和固定座,所述夹紧机构包括第一夹紧件和第二夹紧件,所述第一夹紧件固定在所述固定座上,所述第二夹紧件和所述平移机构固定连接,所述平移机构用于带动所述第二夹紧件在第一位置和第二位置之间移动,所述过渡机构用于和机器人和加工中心配合以使得所述机器人夹取位于加工中心的第一加工位中加工完成的工件的上方结构放置在所述过渡机构中再从所述过渡机构中夹取所述工件的下方结构放置在所述加工中心的第二加工位中。通过设置过渡机构,使得将工件放置在过渡机构中后取出时可以精准的放置在下一加工位上进行下一道工序的加工,提升了生产效率。
技术研发人员:员振东,陈志亮,刘建斌
受保护的技术使用者:江苏莱克智能电器有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!