一种原料高效提升输送装置的制作方法
1.本实用新型涉及物料运输设备技术,具体涉及一种原料高效提升输送装置。
背景技术:
2.在加工的过程中,很多地方都需要进行投料,而投料需要将物料运输一定的高度在进行投放,投料的高度由设备决定,并且,不同的物料提升的方式不一样,有的物料可以使用螺杆进行提升,有的可以使用斗式提升机进行提升,还有的专门使用提升电梯来进行物料提升,特别是对于一些袋装料或是运输到高层进行暂时存储的物料,更是需要使用提升电梯进行原料的提升输送,现在的原料提升电梯和普通的电梯相差不大,都是需要使用人工将原料先推进行电梯,然后电梯向上运输原料,到达预设楼层后,在由工作人员将原料从电梯力推出或是拉出。这种方式虽然非常方便,但是,推料时由于内部空间较小,工作人员并不好进入内部进行推,采用拖拉的方式虽然方便,但是,在原料相对较重的时候,并不方便将物料从电梯力拖拉出,非常的费力,而且,电梯的门收一定的时间控制,很多时间,拖拉会超时,这样就容易损伤电梯门。
技术实现要素:
3.本实用新型的目的在于提供一种原料高效提升输送装置,解决现有的原料提升运输电梯在输送原料的过程中,不方便将原料从电梯内运送出来的问题。
4.为解决上述的技术问题,本实用新型采用以下技术方案:
5.一种原料高效提升输送装置,包括电梯支架和提升电梯箱,所述电梯支架包括四根支柱和连接在支柱的横杆,在电梯支架的两侧设置有定位滑道,在电梯支架的底部设置有底槽,在电梯支架的顶部设置有电机架,电机架上设置有提升电机,提升电机通过滑轮组钢丝绳与提升电梯箱连接,在提升电梯箱的底部设置有货架托板,所述货架托板包括主托板体,活动板和支架板,所述活动板转接设置在主托板体上,所述支架板设置在主托板体的下方,支架板与主托板体通过连接柱固定连接,活动板与支架板之间设置有液压伸缩柱;所述主托板体的一侧设置有第一定位板,相邻一侧设置有第二定位板,所述第一定位板滑接设置在定位滑道内;本装置还包括拖拉装置,所述拖拉装置包括货物托板和拖车,所述货物托板设置为一块方形板,包括托板耳和滚轮,托板耳设置货物托板板体的一侧,滚轮设置在货物托板板体的底部,托板耳上设置有拖拉孔,货物托板设置在货架托板上;所述拖车设置为带滚轮的滑轨小车,其底部设置有滑块和滚轮,其顶部设置有滚轮电机与滚轮连接,其一侧转接设置有托钩,托钩与拖拉孔相适配,在地面上设置有拖车槽,拖车槽内设置有滑轨,滑块滑接设置在滑轨内,拖车槽的另一侧设置有拖车电机与拖车连接。
6.进一步的,在第二定位板的两侧设置有传感器架板,传感器架板上设置有传感器,所述传感器包括接近传感器和位置传感器,传感器固定设置传感器架板上。
7.进一步的,所述主托板体设置有活动板槽,所述活动板嵌设在主托板体内,活动板的转轴设置在靠近第二定位板一侧,转轴上设置有转轴扭力弹簧。
8.进一步的,在主托板体的中心设置有供液压伸缩柱通过的伸缩柱槽。
9.进一步的,在另一侧定位滑道内设置有对重装置,在电机架上设置有对重电机通过滑轮组钢绳与对重装置连接。
10.进一步的,所述支架板悬设在置在提升电梯箱的底部并置于底槽内。
11.进一步的,在第二定位板的两侧设置有传感器架板,一侧传感器架板低于第二定位板,一侧传感器架板与第二定位板齐平,齐平一侧第二定位板上设置有接近传感器,另一侧设置有位置传感器。
12.进一步的,所述对重电机与提升电机同步联动控制。
13.进一步的,所述在主托板体的中心设置有供液压伸缩柱通过的伸缩柱槽,所述液压伸缩柱一端转接设置在活动板一端,另一端转接设置在支架板的中心。
14.进一步的,在主托板体靠近第二定位板的一侧设置有碰撞传感器,碰撞传感器固定设置在一块板上,板转接设置在主托板体的端面上。
15.进一步的,在货物托板靠近托板耳一侧的端面上设置有防撞的橡胶条
16.进一步的,所述拖车槽倾斜设置。
17.进一步的,本装置的入口设置在底部一侧,其出口设置在顶部与出口相对的一侧。
18.进一步的,入口和出口处设置有防护门。
19.进一步的,所有电机的控制皆为手动控制。
20.与现有技术相比,本实用新型的有益效果是:
21.本装置通过,货架托板和拖车双重辅助货物的拖出,这样,电梯支架和提升电梯箱所占用的地面积就可以直与货物托板大小一样,减少了土地空间的浪费,而且,通过货架托板和拖车双重辅助货物的拖出,能更好的拖出货物,并且,整个过程控制一环接一环,控制安全性更高,避免安全事故的发生,本装置结构简单,组装,使用的非常的方便,减少了土地人力的浪费,解决了现有的原料提升运输电梯在输送原料的过程中,不方便将原料从电梯内运送出来的问题。
附图说明
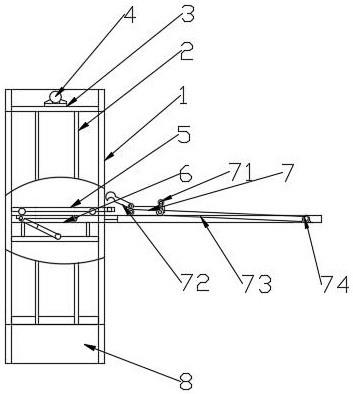
22.图1为本实用新型正视图。
23.图2为本实用新型俯视图。
24.图3为本实用新型货架托板正视图。
25.图4为本实用新型货架托板俯视图。
26.图5为本实用新型货物托板正视图。
27.图6为本实用新型货物托板俯视图。
28.图中,1
‑
支柱、2
‑
定位滑道、3
‑
电机架、4
‑
提升电机、5
‑
货物托板、6
‑
货架托板、7
‑
拖车、8
‑
底槽、9
‑
对重装置、10
‑
对重电机、51
‑
托板耳、52
‑
拖拉孔、53
‑
橡胶条、54
‑
滚轮、55
‑
定位槽、61
‑
主托板体、62
‑
活动板、63
‑
支架板、64
‑
连接柱、65
‑
液压伸缩柱、66
‑
第一定位板、67
‑
第二定位板、68
‑
传感器架板、69
‑
接近传感器、610
‑
位置传感器、611
‑
碰撞传感器、612
‑
伸至柱槽、613
‑
转轴扭力弹簧,71
‑
滚轮电机、72
‑
托钩、73
‑
拖车槽、74
‑
拖车电机。
具体实施方式
29.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
30.具体实施例:
31.如图所示的一种原料高效提升输送装置,包括电梯支架和提升电梯箱,在本装置中,电梯支架由四根支柱1作为支撑柱,在支柱1之间设置有横杆相互固定。在电梯支架的两侧设置有定位滑道2用于定位,在电梯支架的底部设置有底槽8用以安放电梯的提升电梯箱,在电梯支架的顶部设置有电机架3,电机架3上设置有提升电机4,提升电机4通过滑轮组钢丝绳与提升电梯箱连接,在提升电梯箱的底部设置有货架托板6。在本装置中,所述货架托板6包括主托板体61,活动板62和支架板63,所述主托板体61上设置有活动板槽,所述活动板62转接设置在主托板体61上并嵌设在活动板槽内。所述支架板63设置在主托板体61的下方,支架板63与主托板体61通过连接柱64固定连接,活动板62与支架板63之间设置有液压伸缩柱65,液压伸缩柱65一端转接设置在活动板62的一度端,另一度昂转接设置在支架板63的中。 为了方便滑动,所述主托板体61的一侧设置有第一定位板66,相邻一侧设置有第二定位板67,所述第一定位板66滑接设置在定位滑道2内。
32.为了方便控制,在第二定位板67的两侧设置有传感器架板68,传感器架板68上设置有传感器,所述传感器包括接近传感器69和位置传感器610,传感器固定设置传感器架板68上。
33.在本装置中,活动板62的转轴设置在靠近第二定位板67一侧,转轴上设置有转轴扭力弹簧613防止卡死。
34.更进一步的,在本装置中,为了方便液压伸缩柱的伸缩,在主托板体61的中心设置有供液压伸缩柱65通过的伸缩柱槽613。
35.在本装置中,为了更好的对托板上的货物进行运输,本装置还包括拖拉装置,所述拖拉装置包括货物托板5和拖车7,所述货物托板5设置为一块方形板,货物就放置在其上,当运输桶状物料时,在版面上设置有定位槽55,货物托板5具体包括托板耳51和滚轮54,托板耳51设置货物托板板体的一侧,滚轮54设置在货物托板板体的底部,托板耳51上设置有拖拉孔52,货物托板5设置在货架托板6上。
36.本装置的拖车7,所述拖车7设置为带滚轮的滑轨小车,其底部设置有滑块和滚轮,滚轮是为了方便运输,而滑块则是为了防止拖车7被拉抛起,为了使拖车7能够来回运动,其顶部设置有滚轮电机71与滚轮连接,滚轮电机71主动带着滚轮转动从而实现主动运动,其一侧转接设置有托钩72,托钩72与拖拉孔52相适配,在地面上设置有拖车槽73,拖车槽73内设置有滑轨,滑块滑接设置在滑轨内,拖车槽73的另一侧设置有拖车电机74与拖车7连接。
37.为了平衡重物,在另一侧定位滑道2内设置有对重装置9,在电机架上设置有对重电机10通过滑轮组钢绳与对重装置9连接。
38.在本装置中,所述支架板63悬设在置在提升电梯箱的底部并置于底槽8内。
39.作为优选的,在第二定位板67的两侧设置有传感器架板68,一侧传感器架板68低于第二定位板67,一侧传感器架板68与第二定位板67齐平,齐平一侧第二定位板67上设置有接近传感器69,另一侧设置有位置传感器610,这样,提升电梯箱在向上提升时的位置就
能实现自动定位了。
40.为了方便控制,所述对重电机10与提升电机4同步联动控制。
41.在本装置中,为了更好的实现拖挂,在主托板体61靠近第二定位板67的一侧设置有碰撞传感器611,碰撞传感器611固定设置在一块板上,板转接设置在主托板体61的端面上,这样,在运送的时候就不会出现位置不准确而无法拖挂。
42.由于货物托板5上装有货物时质量大,为了防止撞坏设备,在货物托板5靠近托板耳51一侧的端面上设置有防撞的橡胶条53。
43.为了防止拖车7对货物托板5有影响,所述拖车槽73倾斜设置。
44.为了方便上下料,本装置的入口设置在底部一侧,其出口设置在顶部与出口相对的一侧,入口和出口处设置有防护门。
45.为了安全控制,所有电机的控制皆为手动控制。
46.本装置的具体工作如下:
47.在货物托板5上装上货物后,将货物托板5推入到货架托板6上提升电梯箱内的,在拖动的过程中,当货物托板5撞到碰撞传感器611,此时,提升电梯箱方可通过提升电机4进行提升,手动启动提升电机4,将货物托板5提升至第二台,在提升的时候,对重电机10控制着对重装置9进行重物平衡,当货物托板5块接近上层地面时,位置传感器610被触发,提升电机4减速,直至接近传感器69被触发说明已经到位置,电机停机,此时,上层人员站在拖车7上,控制着拖车7来到出口处,到到位置时将托钩72扣在拖拉孔52内,启动拖车电机74将货物托板5拖出,同时,液压伸缩柱65启动,辅助货物托板5的拖出,当货物被拖出后,碰撞传感器611回位,此时,提升电机4可继续启动,进行回位。
48.在本说明书中所谈到的“一个实施例”、“另一个实施例”、
ꢀ“
实施例”、“优选实施例”等,指的是结合该实施例描述的具体特征、结构或者特点包括在本技术概括性描述的至少一个实施例中。在说明书中多个地方出现同种表述不是一定指的是同一个实施例。进一步来说,结合任一实施例描述一个具体特征、结构或者特点时,所要主张的是结合其他实施例来实现这种特征、结构或者特点也落在本实用新型的范围内。
49.尽管这里参照本实用新型的多个解释性实施例对本实用新型进行了描述,但是,应该理解,本领域技术人员可以设计出很多其他的修改和实施方式,这些修改和实施方式将落在本技术公开的原则范围和精神之内。更具体地说,在本技术公开、附图和权利要求的范围内,可以对主题组合布局的组成部件和/或布局进行多种变型和改进。除了对组成部件和/或布局进行的变形和改进外,对于本领域技术人员来说,其他的用途也将是明显的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1