一种主动防划压带轮的制作方法
1.本实用新型涉及压带轮技术领域,尤其涉及一种主动防划压带轮。
背景技术:
2.带式输送机被广泛的用于矿山、电厂、包装和运输等行业,主要功能有防止凹弧段的胶带抬起,脱离拖辊面,避免空载时飘带和带料时撒料的问题。现有的压带轮滚动是通过传送带带动的,且现有的压带轮由于直接与转轴固定连接,传送带带动压带轮转动时转轴也会跟着转动,因此传送带与压带轮之间无可避免的存在切向的摩擦力,这个切向的摩擦力导致压带轮容易对传送带会造成磨损和划伤。
技术实现要素:
3.为了解决以上现有技术的缺点和不足之处,本实用新型的目的是提供一种主动防划压带轮。
4.本实用新型的技术方案是:一种主动防划压带轮,包括转轴、轮体和支撑腿,所述轮体包括2个,轮体1左右对称连接在转轴上,所述支撑腿包括2个,支撑腿左右对称连接在转轴左右两侧;
5.所述转轴与支撑腿固定连接;
6.还包括驱动电机,所述驱动电机固定连接在转轴上,驱动电机的轴与转轴平行,驱动电机转轴两端固定连接驱动轮,驱动轮外侧面与轮体外侧面相切;
7.所述轮体包括:
8.轴承,所述轴承内侧面固定连接在转轴上;
9.轮圈,所述轮圈为环形,轮圈外侧面光滑;
10.辐条,所述辐条包括6根以上,辐条一端固定连接轮圈内侧面,辐条与轮圈连接点与轮圈靠转轴中心的侧面距离与驱动轮宽度相匹配,辐条另一端固定连接轴承外侧面,辐条与转轴垂直,辐条绕轮圈中轴线均匀分布;
11.肋杆,所述肋杆与辐条数量相同,每一根肋杆对应一根辐条,肋杆一端固定连接辐条中部,肋杆另一端连接轴承,肋杆位于辐条靠转轴中点的一侧,肋杆与辐条所在的平面通过轮圈中轴线,肋杆与轮圈中轴线成夹角,肋杆越靠近轮圈中轴线与转轴中点的距离越近。
12.进一步地,还包括:
13.控制器,所述控制器与驱动电机电连接,控制器与电厂dcs控制台电连接。
14.进一步地,还包括:
15.无线接收模块,所述无线接收模块与控制器电连接;
16.无线发射模块,所述无线发射模块与电厂dcs控制台电连接,无线发射模块与无线接收模块无线连接。
17.进一步地,所述支撑腿包括:
18.伸缩部;
19.缓冲部,所述缓冲部下端与伸缩部上端连接。
20.进一步地,所述缓冲部包括:
21.滑筒,所述滑筒下端固定连接伸缩部上端,滑筒上端固定连接限位挡环,限位挡环内径与滑杆外径相匹配;
22.滑杆,所述滑杆上端固定连接转轴,滑杆外径小于永磁铁外径;
23.电磁铁,所述电磁铁固定设置在滑筒底部,电磁铁与控制器电连接;
24.永磁铁,所述永磁铁与滑筒内腔相匹配,永磁铁固定连接在滑杆下端,永磁铁滑动安装在滑筒内腔;
25.加速度传感器,所述加速度传感器固定连接在转轴上,加速度传感器与控制器电连接。
26.进一步地,所述电磁铁上部的滑筒侧部开有侧孔,侧孔贯通滑筒侧壁内外表,侧孔使滑筒侧壁绕滑筒中轴线成非闭合的环状结构;
27.所述缓冲部还包括:
28.固定套,所述固定套为绝缘材料,固定套内径与滑筒外径相匹配,固定套固定套接在侧孔处的滑筒上。
29.进一步地,所述滑筒内的电磁铁上部固定连接隔挡板,所述电磁铁下表面设有缓冲橡胶垫。
30.进一步地,所述轮圈靠近传送带的侧边缘为圆弧倒角。
31.本实用新型的有益效果是:与现有技术相比,
32.1)本实用新型通过驱动电机带动驱动轮使轮体与传送带速度匹配,轮体转动无需传送带带动,使得传送带与轮体间的切向力消失,使轮体对传送带的磨损进一步减小,延长了传送带的使用寿命,另外由于驱动轮与轮体的接触点为轮体内侧面,使得轮体外侧面可以做得很光滑,从而减小了轮体与传送带之间的摩擦力,减小了传送带的磨损和划伤;
33.2)进一步地,本实用新型通过读取dcs中的传送带速度,控制器通过传送带速度值控制轮体速度,使得轮体表面的线速度与传送带速度更加一致,进一步减少传送带磨损;
34.3)进一步地,本实用新型通过伸缩部使得转轴可升降,从而调整轮体与传送带间的压力;
35.4)进一步地,本实用新型通过缓冲部,使得轮体与传送带间的相互作用不是刚性的,而是具有柔性的,避免轮体与传送带硬碰硬导致传送带磨损;
36.5)进一步地,本实用新型通过加速度传感器监测轮体向上的加速度,向上的加速度大则表明传送带对轮体的作用力大,这时通过控制器控制电磁铁产生磁场,使电磁铁上端的磁极与永磁铁下端的磁极相同,从而使轮体受到向上的推力,减小传送带与轮体间高压力接触时间,使得轮体能够避开传送带上扬,减小轮体对传送带的磨损;
37.6)进一步地,本实用新型通过设置侧孔,使得滑筒内的磁通变化时,滑筒不会形成闭合回路,因此永磁铁在滑筒内运动时不会受到阻碍运动的电磁力作用,因此对电磁铁的排斥力反应更迅速;
38.7)进一步地,本实用新型通过隔挡板和缓冲橡胶垫,使得永磁铁和电磁铁间接触具有缓冲,避免电磁铁和永磁铁硬碰硬损坏;
39.8)进一步地,本实用新型通过增加肋杆,使得轮体更加抗轴向力,避免轮体在轴向
力作用下产生形变;
40.9)进一步地,本实用新型通过将轮圈靠近传送带的侧边缘为圆弧倒角,使得传送带与轮圈靠近传送带的侧边缘接触面更大,避免传送带被割伤。
附图说明
41.图1为本实用新型实施实例1的前视图;
42.图2为图1中a
‑
a剖面线的剖视图;
43.图3为图1中b
‑
b剖面线的剖视图;
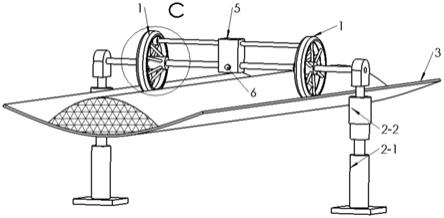
44.图4为本实用新型实施实例1的立体视图;
45.图5为图4中c处的局部视图;
46.图6为本实用新型实施实例1的电路连接框图。
具体实施方式
47.下面结合附图及具体的实施例对实用新型进行进一步介绍:
48.实施例1:参考图1至图6,一种主动防划压带轮,包括转轴4、轮体1和支撑腿2,所述轮体1包括2个,轮体1左右对称连接在转轴4上,所述支撑腿2包括2个,支撑腿2左右对称连接在转轴4左右两侧;所述转轴4与支撑腿2固定连接;还包括驱动电机5,所述驱动电机5固定连接在转轴4上,驱动电机5的轴与转轴4平行,驱动电机5转轴4两端固定连接驱动轮1,驱动轮1外侧面与轮体1外侧面相切;所述轮体1包括:轴承1
‑
6,所述轴承1
‑
6内侧面固定连接在转轴4上,所述轴承为角接触球轴承或圆锥滚子轴承;轮圈1
‑
1,所述轮圈1
‑
1为环形,轮圈1
‑
1外侧面光滑;辐条1
‑
2,所述辐条1
‑
2包括6根以上,辐条1
‑
2一端固定连接轮圈1
‑
1内侧面,辐条1
‑
2与轮圈1
‑
1连接点与轮圈1
‑
1靠转轴4中心的侧面距离与驱动轮5
‑
1宽度相匹配,辐条1
‑
2另一端固定连接轴承1
‑
6外侧面,辐条1
‑
2与转轴4垂直,辐条1
‑
2绕轮圈1
‑
1中轴线均匀分布;肋杆1
‑
3,所述肋杆1
‑
3与辐条1
‑
2数量相同,每一根肋杆1
‑
3对应一根辐条1
‑
2,肋杆1
‑
3一端固定连接辐条1
‑
2中部,肋杆1
‑
3另一端连接轴承1
‑
6,肋杆1
‑
3位于辐条1
‑
2靠转轴4中点的一侧,肋杆1
‑
3与辐条1
‑
2所在的平面通过轮圈1
‑
1中轴线,肋杆1
‑
3与轮圈1
‑
1中轴线成夹角,肋杆1
‑
3越靠近轮圈1
‑
1中轴线与转轴4中点的距离越近。这里的驱动电机5为齿轮减速电机,并且驱动电机5通过变频器调速,使得驱动电机5带动轮体转动的速度能够与传送带的速度1.5m/s~2m/s相匹配。
49.进一步地,还包括:控制器9,所述控制器9与驱动电机5电连接,控制器9与电厂dcs控制台电连接。这里的控制器9可以是plc、arduino或树莓派等带外围电路的控制组件。
50.进一步地,还包括:无线接收模块11,所述无线接收模块11与控制器9电连接;无线发射模块12,所述无线发射模块12与电厂dcs控制台电连接,无线发射模块12与无线接收模块11无线连接,以实时读取传送带的速度,以便对轮体1速度进行精确控制。这里的无线接收模块11和线发射模块12可采用4g模块或wifi模块。
51.进一步地,所述支撑腿2包括:伸缩部2
‑
1;缓冲部2
‑
2,所述缓冲部2
‑
2下端与伸缩部2
‑
1上端连接。这里的伸缩部2
‑
1为液压缸。
52.进一步地,所述缓冲部2
‑
2包括:滑筒2
‑2‑
1,所述滑筒2
‑2‑
1下端固定连接伸缩部2
‑
1上端,滑筒2
‑2‑
1上端固定连接限位挡环2
‑2‑
7,限位挡环2
‑2‑
7内径与滑杆2
‑2‑
4外径相
匹配;滑杆2
‑2‑
4,所述滑杆2
‑2‑
4上端固定连接转轴4,滑杆2
‑2‑
4外径小于永磁铁2
‑2‑
3外径;电磁铁2
‑2‑
2,所述电磁铁2
‑2‑
2固定设置在滑筒2
‑2‑
1底部,电磁铁2
‑2‑
2与控制器9导线连接;永磁铁2
‑2‑
3,所述永磁铁2
‑2‑
3与滑筒2
‑2‑
1内腔相匹配,永磁铁2
‑2‑
3固定连接在滑杆2
‑2‑
4下端,永磁铁2
‑2‑
3滑动安装在滑筒2
‑2‑
1内腔;加速度传感器6,所述加速度传感器6固定连接在转轴4上,加速度传感器6与控制器9导线连接。
53.进一步地,所述电磁铁2
‑2‑
2上部的滑筒2
‑2‑
1侧部开有侧孔2
‑2‑
9,侧孔2
‑2‑
9贯通滑筒2
‑2‑
1侧壁内外表,侧孔2
‑2‑
9使滑筒2
‑2‑
1侧壁绕滑筒2
‑2‑
1中轴线成非闭合的环状结构;所述缓冲部2
‑
2还包括:固定套2
‑2‑
8,所述固定套2
‑2‑
8为绝缘材料,固定套2
‑2‑
8内径与滑筒2
‑2‑
1外径相匹配,固定套2
‑2‑
8固定套2
‑2‑
8接在侧孔2
‑2‑
9处的滑筒2
‑2‑
1上。
54.进一步地,所述滑筒2
‑2‑
1内的电磁铁2
‑2‑
2上部固定连接隔挡板2
‑2‑
5,所述电磁铁2
‑2‑
2下表面设有缓冲橡胶垫2
‑2‑
6。
55.进一步地,所述轮圈1
‑
1靠近传送带3的侧边缘为圆弧倒角。
56.一种主动防划压带轮的控制方法,所述方法包括以下步骤:
57.s01、当加速度传感器6检测到向下的加速度大于设定阈值a时屏蔽加速度传感器6,控制器9控制电磁铁2
‑2‑
2两端的电压使电磁铁2
‑2‑
2内产生恒定电流持续4秒,使电磁铁2
‑2‑
2上端的磁极与永磁铁2
‑2‑
3下端的磁极极性相同;
58.s02、在接下来的4秒中将电磁铁2
‑2‑
2两端电压线性的降到0,当电磁铁2
‑2‑
2两端电压降到0以后开始读取加速度传感器6检测值,返回步骤s01;
59.步骤s01中电磁铁2
‑2‑
2的两端电压大小的计算方法如下:
[0060][0061]
式中,u表示电磁铁2
‑2‑
2两端电压,μ0表示真空磁导率,s0表示电磁铁2
‑2‑
2和永磁铁之间的气隙面积,a表示设定阈值,m表示转轴4、轮体1、驱动电机5、驱动轮5
‑
1和滑杆2
‑2‑
4总质量,h表示永磁体磁动势,δ表示隔挡板2
‑2‑
5厚度与缓冲橡胶垫2
‑2‑
6厚度之和;ρ表示电磁铁2
‑2‑
2线圈的电阻率;d2表示电磁铁2
‑2‑
2线圈的绕线外径;d2表示电磁铁2
‑2‑
2线圈的绕线内径;d表示电磁铁2
‑2‑
2线圈的漆包线直径。
[0062]
以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1