一种新型自动识别垃圾类别的智能垃圾桶
1.本实用新型涉及垃圾桶领域,尤其涉及一种新型自动识别垃圾类别的智能垃圾桶。
背景技术:
2.垃圾桶,又名废物箱或垃圾箱,是指装放垃圾的容器。多数以金属或塑胶制,用时放入塑料袋,当垃圾一多便可扎起袋丢掉。垃圾桶是人们生活中“藏污纳垢”的容器,也是社会文化的一种折射,多数垃圾桶都有盖以防垃圾的异味四散,有些垃圾桶可以以脚踏开启,家居的垃圾桶多数放于厨房,以便放置厨余,有些家庭会在主要房间都各置一,有些游乐场的垃圾桶会特别设计成可爱的人物。
3.随着垃圾分类的推广,智能分类已经逐渐成为一个时代的话题,而现有技术中,垃圾桶无法满足人们的日常使用需求,无法使得人们的生活更加简便和高效,浪费了过多对垃圾进行分类和打包套袋的时间。
4.因此,有必要提供一种新型自动识别垃圾类别的智能垃圾桶解决上述技术问题。
技术实现要素:
5.本实用新型提供一种新型自动识别垃圾类别的智能垃圾桶,解决了,现有技术中,垃圾桶无法满足人们的日常使用需求,无法使得人们的生活更加简便和高效,浪费了过多对垃圾进行分类和打包套袋时间的问题。
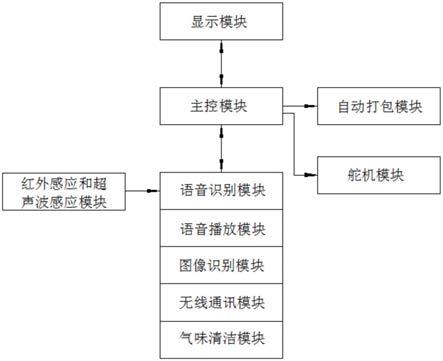
6.为解决上述技术问题,本实用新型提供的新型自动识别垃圾类别的智能垃圾桶,包括:显示模块、红外感应模块和超声波感应模块;
7.主控模块,所述主控模块的输入端与所述显示模块的输出端双向连接,并且主控模块的输出端分别连接有自动打包模块和舵机模块,所述主控模块的输出端分别连接有语音识别模块、语音播放模块、图像识别模块、无线通讯模块和气味清洁模块。
8.一种新型自动识别垃圾类别的智能垃圾桶,包括所述的显示模块、红外感应模块和超声波感应模块、主控模块、自动打包模块、舵机模块、语音识别模块、语音播放模块、图像识别模块、无线通讯模块、气味清洁模块,所述型自动识别垃圾类别的智能垃圾桶还包括:垃圾桶;
9.安装槽,所述安装槽开设于所述垃圾桶上;
10.控制器,所述控制器设置于所述安装槽的内部;
11.驱动马达,所述驱动马达设置于所述安装槽的内部,所述驱动马达输出轴上固定连接有转盘,所述转盘上固定连接有两个滑动件,所述安装槽内部的两侧之间固定连接有挡板,所述挡板的一侧滑动连接有两个滑动板,两个所述滑动板上均开设有滑动槽,所述滑动件的外表面滑动连接于所述滑动槽的内部。
12.优选的,所述滑动板的一侧固定连接有连接板,所述挡板的一侧接触于所述控制器上,所述控制器的两侧均固定连接有固定槽,所述挡板上均滑动连接有移动板,所述移动
板的一侧固定连接有凸块,所述凸块的一侧贯穿所述固定槽并延伸至所述固定槽的内部。
13.优选的,所述移动板的一侧滑动连接于所述安装槽内部的一侧,并且移动板的另一侧设置有限位弹簧,所述限位弹簧的一端设置于所述安装槽内部的一侧。
14.优选的,所述移动板的一侧贯穿所述挡板并延伸至所述挡板的一侧,所述移动板延伸至所述挡板的一侧固定于所述连接板上。
15.优选的,所述控制器上均开设有散热孔,并且控制器上开设有槽体,所述槽体内部的两侧之间从左至右分别转动连接有第一托辊和第二托辊,所述第一托辊和第二托辊的外表面之间传动连接有输送带,所述输送带上固定连接有清洁刷。
16.优选的,所述控制器上开设有控制槽,所述控制槽的内部设置有电机,所述电机输出轴的一端依次贯穿所述控制槽和槽体并延伸至所述槽体的内部,所述电机输出轴延伸至所述槽体内部的一端固定于所述第二托辊上。
17.与相关技术相比较,本实用新型提供的新型自动识别垃圾类别的智能垃圾桶具有如下有益效果:
18.本实用新型提供一种新型自动识别垃圾类别的智能垃圾桶,具有自动识别垃圾类别的功能,满足了人们的日常需求,使人们的生活更加简便和高效,省去了人们对垃圾进行分类和打包套袋的时间,进而提高了该垃圾桶的实用性。
附图说明
19.图1为本实用新型提供的新型自动识别垃圾类别的智能垃圾桶的第一实施例的结构示意图;
20.图2为本实用新型提供的新型自动识别垃圾类别的智能垃圾桶的第二实施例的结构示意图;
21.图3为图2所示的垃圾桶的俯视结构示意图;
22.图4为图3所示的垃圾桶的内部结构示意图;
23.图5为图4所示的控制器的侧视截面结构示意图;
24.图6为图4所示的转盘的侧视结构示意图。
25.图中标号:1、垃圾桶,2、安装槽,3、控制器,4、驱动马达,5、转盘,6、挡板,7、滑动板,8、滑动槽,9、连接板,10、固定槽,11、移动板,12、凸块,13、散热孔,14、槽体,15、第一托辊,16、第二托辊,17、输送带,18、清洁刷,19、控制槽,20、电机,21、限位弹簧,22、滑动件。
具体实施方式
26.下面结合附图和实施方式对本实用新型作进一步说明。
27.第一实施例
28.请结合参阅图1,其中,图1为本实用新型提供的新型自动识别垃圾类别的智能垃圾桶的第一实施例的结构示意图。新型自动识别垃圾类别的智能垃圾桶,包括:显示模块、红外感应模块和超声波感应模块;
29.主控模块,所述主控模块的输入端与所述显示模块的输出端双向连接,并且主控模块的输出端分别连接有自动打包模块和舵机模块,所述主控模块的输出端分别连接有语音识别模块、语音播放模块、图像识别模块、无线通讯模块和气味清洁模块;
30.主控模块与显示模块相连接,包含了整个智能垃圾桶的所有模块控制的中心,相当于电脑的cpu,也是其他各个模块使用的交流中心;
31.语音识别模块说出唤醒词“垃圾桶”后,再说一句垃圾名称,语音识别模块端识别到相应关键词,便会将结果通过串口发送到stm32端,紧接着语音识别模块会开始接收其他语音信息或者图像信息,在接下来的语音信息中,分辨关键词,将对应信息送达主控模块分配信息;
32.我们需要根据垃圾分类的标准,将常见的一些垃圾,分为:可回收垃圾、厨余垃圾、有害垃圾和其他垃圾这四大类:
33.(1)可回收垃圾:旧报纸、塑料瓶、废铁、图书、坏手机、玻璃瓶、旧水管、洗衣机等;
34.(2)厨余垃圾:剩菜、剩饭、菜叶、果皮、隔夜饭、骨头、鸡蛋壳、茶叶渣、菜根等;
35.(3)有害垃圾:灯泡、电池、药品、灯管、油漆桶、化妆品、老鼠药、指甲油、杀虫剂等;
36.(4)其他垃圾:果壳、泥土、废水、陶瓷、一次性筷子、卫生纸、烟头、餐巾纸。
37.语音播放模块stm32端若判断到有人说出唤醒词了,通过串口发送指令给语音播报模块,外放喇叭便会播报“你好”的音频,若判断到相应的垃圾种类,便会播报相应的垃圾种类音频。
38.无线通讯模块
39.stm32端通过串口连接wifi模块esp8266
‑
01s,接入onenet云平台,实现联网功能,通过云端下达指令给设备,从而控制垃圾桶实现翻盖及控制继电器通断。
40.显示模块
41.主要用于显示垃圾桶内此时的状态,与红外感应相结合运用。
42.展示其他模块的作用
43.舵机模块
44.主要负责开关盖的承接图像识别模块
45.(1)在托盘上安装一个与树莓派相连接的压敏电阻。垃圾被扔入垃圾桶后,通过压敏电阻,给树莓派一个控制信号。树莓派与摄像头连接,然后控制摄像头拍照;
46.(2)拍完的照片再传给树莓派,输入到卷积神经网络的输入层,再由卷积层对垃圾图像进行特征提取,然后经由池化层对得到的特征图像进行降为处理,由激励层做出非线性映射,然后由全连接层对多个特征值进行整合,最后由输出层进行分类。工作流程如图2所示;
47.(3)分类结果传入arduino,然后操纵电机进行转动。
48.红外感应和超声波感应模块
49.红外感应模块与舵机模块相结合。
50.自动打包模块
51.在垃圾桶中设置一道感应线(红外线),当桶内垃圾高达一定程度时,即触碰到光线时,自动打包系统开始工作;
52.在垃圾桶中设置一个热塑器,将垃圾袋自动封闭,在模块工作时,将工作于该垃圾桶的舵机模块关闭,并在显示模块中显示该垃圾桶已满的提示;
53.等待工作人员将垃圾桶内的垃圾清理后,在解除提示灯。
54.气味清洁模块
55.在主控模板中设置一道定时程序,每隔一段时间进行一次气味清新;
56.同时在主控程序与显示模板设置一道语音识别指令用于控制气味清楚,当识别到“气味清洁”这一关键词,主控模板将会控制气味清洁模块进行清理,并将使自动打包模块工作;
57.在垃圾桶的盖子上可以安装一个气味吸收器件和清新剂喷洒模式。
58.本实用新型提供的新型自动识别垃圾类别的智能垃圾桶的工作原理如下:
59.在丢垃圾的过程中,说出唤醒词“垃圾桶”后,再说一句垃圾名称,语音识别模块端识别到相应关键词,便会将结果通过串口发送到stm32端,紧接着语音识别模块会开始接收其他语音信息或者图像信息,在接下来的语音信息中,分辨关键词,将对应信息送达主控模块分配信息,stm32端若判断到有人说出唤醒词了,通过串口发送指令给语音播报模块,外放喇叭便会播报“你好”的音频,若判断到相应的垃圾种类,便会播报相应的垃圾种类音频,垃圾被扔入垃圾桶后,通过压敏电阻,给树莓派一个控制信号。树莓派与摄像头连接,然后控制摄像头拍照,拍完的照片再传给树莓派,输入到卷积神经网络的输入层,再由卷积层对垃圾图像进行特征提取,然后经由池化层对得到的特征图像进行降为处理,由激励层做出非线性映射,然后由全连接层对多个特征值进行整合,最后由输出层进行分类;
60.随后stm32端通过串口连接wifi模块esp8266
‑
01s,接入onenet云平台,实现联网功能,通过云端下达指令给设备,从而控制垃圾桶实现翻盖及控制继电器通断,并且在垃圾桶中设置一道感应线(红外线),当桶内垃圾高达一定程度时,即触碰到光线时,自动打包系统开始工作,并且在垃圾桶中设置一个热塑器,将垃圾袋自动封闭,在模块工作时,将工作于该垃圾桶的舵机模块关闭,并在显示模块中显示该垃圾桶已满的提示,然后等待工作人员将垃圾桶内的垃圾清理后,在解除提示灯,在主控模板中设置一道定时程序,每隔一段时间进行一次气味清新,同时在主控程序与显示模板设置一道语音识别指令用于控制气味清楚,当识别到“气味清洁”这一关键词,主控模板将会控制气味清洁模块进行清理,并将使自动打包模块工作,在垃圾桶的盖子上可以安装一个气味吸收器件和清新剂喷洒模式。
61.与相关技术相比较,本实用新型提供的新型自动识别垃圾类别的智能垃圾桶具有如下有益效果:
62.具有自动识别垃圾类别的功能,满足了人们的日常需求,使人们的生活更加简便和高效,省去了人们对垃圾进行分类和打包套袋的时间,进而提高了该垃圾桶的实用性。
63.第二实施例
64.请参阅第二实施例的图2
‑
6,本实用新型的第二实施例还提供另一种新型自动识别垃圾类别的智能垃圾桶。
65.在本实施例的一种可选的方式中,所述新型自动识别垃圾类别的智能垃圾桶,可以包括所述的显示模块、红外感应模块和超声波感应模块、主控模块、自动打包模块、舵机模块、语音识别模块、语音播放模块、图像识别模块、无线通讯模块、气味清洁模块,所述型自动识别垃圾类别的智能垃圾桶还包括:垃圾桶1;
66.安装槽2,所述安装槽2开设于所述垃圾桶1上;
67.控制器3,所述控制器3设置于所述安装槽2的内部;
68.驱动马达4,所述驱动马达4设置于所述安装槽2的内部,所述驱动马达4输出轴上固定连接有转盘5,所述转盘5上固定连接有两个滑动件22,所述安装槽2内部的两侧之间固
定连接有挡板6,所述挡板6的一侧滑动连接有两个滑动板7,两个所述滑动板7上均开设有滑动槽8,所述滑动件22的外表面滑动连接于所述滑动槽8的内部;
69.驱动马达4与外界的电源以及控制开关进行连接;
70.驱动马达4为正反转驱动马达4,实现对控制器3进行拆装的效果即可;
71.显示模块、红外感应模块和超声波感应模块、主控模块、自动打包模块、舵机模块、语音识别模块、语音播放模块、图像识别模块、无线通讯模块、气味清洁模块设置在控制器3的内部。
72.所述滑动板7的一侧固定连接有连接板9,所述挡板6的一侧接触于所述控制器3上,所述控制器3的两侧均固定连接有固定槽10,所述挡板6上均滑动连接有移动板11,所述移动板11的一侧固定连接有凸块12,所述凸块12的一侧贯穿所述固定槽10并延伸至所述固定槽10的内部;
73.凸块12与固定槽10相适配。
74.所述移动板11的一侧滑动连接于所述安装槽2内部的一侧,并且移动板11的另一侧设置有限位弹簧21,所述限位弹簧21的一端设置于所述安装槽2内部的一侧;
75.限位弹簧21的设置,能够对移动板11的位置进行限位,提高凸块12与固定槽10之间卡接的牢固性。
76.所述移动板11的一侧贯穿所述挡板6并延伸至所述挡板6的一侧,所述移动板11延伸至所述挡板6的一侧固定于所述连接板上。
77.所述控制器3上均开设有散热孔13,并且控制器3上开设有槽体14,所述槽体14内部的两侧之间从左至右分别转动连接有第一托辊15和第二托辊16,所述第一托辊15和第二托辊16的外表面之间传动连接有输送带17,所述输送带17上固定连接有清洁刷18;
78.清洁刷18的设置,能够对散热孔13上的灰尘进行扫动,达到清灰的效果;
79.散热孔13的设置,能够对控制器3在工作时产生的热量进行散热。
80.所述控制器3上开设有控制槽19,所述控制槽19的内部设置有电机20,所述电机20输出轴的一端依次贯穿所述控制槽19和槽体14并延伸至所述槽体14的内部,所述电机20输出轴延伸至所述槽体14内部的一端固定于所述第二托辊16上;
81.电机20与外界的电源以及控制开关进行连接;
82.电机20为正反转电机。
83.在本实施例的另一种可选的方式中,所述新型自动识别垃圾类别的智能垃圾桶也可以不包括所述的显示模块、红外感应模块和超声波感应模块、主控模块、自动打包模块、舵机模块、语音识别模块、语音播放模块、图像识别模块、无线通讯模块、气味清洁模块,仅需满足,不妨碍所述新型自动识别垃圾类别的智能垃圾桶所组成的其他元件,对控制器3可以进行拆装的效果即可。
84.在本实施例的又一种可选的方式中,所述新型自动识别垃圾类别的智能垃圾桶也可以包括现有技术中的电子设备或功能模块,以替换所述的显示模块、红外感应模块和超声波感应模块、主控模块、自动打包模块、舵机模块、语音识别模块、语音播放模块、图像识别模块、无线通讯模块、气味清洁模块,并实现上述模块的同样功能。仅需满足现有技术中的电子设备或功能模块,不妨碍所述新型自动识别垃圾类别的智能垃圾桶所组成的其他元件,对控制器3可以进行拆装的效果即可。
85.与相关技术相比较,本实用新型提供的新型自动识别垃圾类别的智能垃圾桶具有如下有益效果:
86.在对控制器进行安装时,首先,将控制器3放入到安装槽2内部的挡板6上,通过启动驱动马达4,使得驱动马达4输出轴上的转盘5进行转动,带动转盘5上的滑动件22进行转动,推动滑动板7在挡板6上进行滑动,带动连接板9上移动板11进行滑动,使得移动板11上凸块12进入到控制器3上的固定槽10中,从而固定控制器3的位置进行固定,完成对控制器3的安装;
87.当控制器3在使用的过程中,会产生大量的热量,通过开设的散热孔13,将产生的热量进行释放,达到快速散热的效果,当长时间的使用下,散热孔13容易受到灰尘的堵塞,进而影响散热的效果,因此需要对散热孔13上堆积的灰尘进行清理,在进行清理时,通过启动电机20,使得电机20输出轴上的第二托辊16进行转动,通过输送带17的连接,带动第一托辊15进行转动,使得输送带17上的清洁刷18在槽体14的内壁上进行滑动,对控制器3上的散热孔13进行接触摩擦,从而对散热孔13上的灰尘进行扫动,达到清灰的效果。
88.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1