一种无人驾驶的安全高效塔吊系统的制作方法
1.本实用新型涉及塔吊技术领域,具体涉及一种无人驾驶的安全高效塔吊系统。
背景技术:
2.塔吊是建筑工地上最常用的一种起重设备,又名“塔式起重机”,以一节一节的接长(简称“标准节”),用来吊施工用的钢筋、木楞、混凝土、钢管等施工的原材料,塔吊是工地上一种必不可少的设备。
3.在目前的施工中,大多采用的还是人工方式进行建筑材料的临时转运,效率低且成本高。具体来说,工人在搬运建筑材料过程中,一是很难快速完成对建筑材料的临时搬运工作,工作效率低且达不到施工现场对场地使用;二是由于建筑材料通常很重,需要的劳动强度较大且易造成施工作业人员身体损伤,由于施工现场环境复杂,在搬运过程中很难保证施工作业人员生命安全,如果采用人工多次搬运则效率较低。
技术实现要素:
4.为解决以上技术问题,本实用新型提供了一种无人驾驶的安全高效塔吊系统,通过超声波进行定位,plc处理器进行控制,实现塔吊的自动搬货。
5.本实用新型采用以下技术方案:
6.一种无人驾驶的安全高效塔吊系统,包括塔吊本体,所述塔吊本体包括驱动机构和抓取机构,所述抓取机构上设有摄像头组件和超声波接收器,所述摄像头组件竖直向下设置,所述驱动机构、抓取机构、摄像头组件和超声波接收器电性连接plc处理器,所述plc处理器电性连接计算机,所述超声波接收器接收设置于货物放置处的超声波发射器发出的超声波。
7.作为优选,所述驱动机构包括与plc处理器电性连接的回转电机、变幅电机和起升电机。
8.作为优选,所述抓取机构包括吊钩和吊臂,所述吊钩铰接于吊臂一端,吊钩包括相互铰接的夹爪。
9.作为优选,所述摄像头组件包括安装支架和摄像头本体,所述安装支架包括固定架和铰接架,所述固定架固定于夹爪上,所述铰接架铰接于固定架上,摄像头本体固定于铰接架上,所述摄像头本体的镜头部分始终朝下。
10.作为优选,超声波接收器设置于吊臂上,超声波接收器整体水平设置,超声波接收器的接收面朝下。
11.作为优选,所述超声波发射器为直线超声波发射器,超声波发射器整体水平设置,其发射面朝上。
12.作为优选,所述超声波接收器接收设置于货物放置处的超声波发射器发出的超声波时,所述超声波发射器与超声波接收器正对设置,其外形尺寸相同,超声波接收器的接收面朝向超声波发射器的发射面。
13.作为优选,货物放置处的货物上设有与吊钩匹配的吊环。
14.作为优选,所述超声波接收器接收设置于货物放置处的超声波发射器发出的超声波时,吊钩位于吊环的正上方。
15.作为优选,还包括无线通讯模块,所述摄像头组件和超声波接收器通过无线通讯模块与plc处理器连接。
16.与现有技术相比,本实用新型具有以下优点:
17.1、通过超声波进行定位,plc处理器进行控制,实现塔吊的自动搬货,避免施工人员手工搬运货物。
18.2、通过夹爪与吊环配合进行货物的抓取,可以简化抓取方式。
19.3、通过安装支架与摄像头本体连接,可以使得摄像头本体始终朝下设置,进行实时拍摄建模。
附图说明
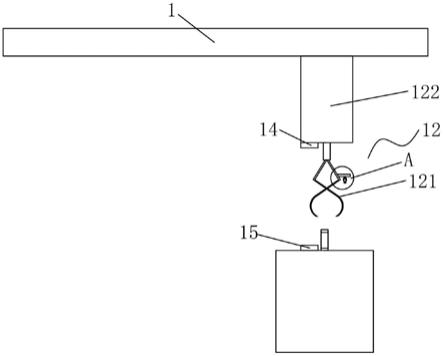
20.图1为塔吊系统的结构示意图。
21.图2为图1的a部局部放大图。
22.图3为塔吊系统的电路连接示意图。
23.图中,塔吊本体1、驱动机构11、抓取机构12、吊钩121、吊臂122、摄像头组件13、安装支架131、固定架1311、铰接架1312、摄像头本体132、超声波接收器14、超声波发射器15、plc处理器2、计算机3、无线通讯模块4。
具体实施方式
24.为了便于理解本实用新型技术方案,以下结合附图与具体实施例进行详细说明。
25.实施例1
26.如图1
‑
3所示,一种无人驾驶的安全高效塔吊系统,包括塔吊本体1,所述塔吊本体1包括驱动机构11和抓取机构12,所述抓取机构12上设有摄像头组件13和超声波接收器14,所述摄像头组件13竖直向下设置,所述驱动机构11、抓取机构12、摄像头组件13和超声波接收器14电性连接plc处理器2,所述plc处理器2电性连接计算机3,所述超声波接收器14接收设置于货物放置处的超声波发射器15发出的超声波。
27.具体的,超声波发射器15朝向超声波接收器14设置,超声波发射器15为直线超声波发射器,可以沿着直线发射超声波,超声波接收器14用于接收超声波发射器15发出的超声波来进行水平方向的定位,判断抓取机构12是否位于货物正上方,使用摄像头组件13进行拍摄,并在计算机3内进行三维建模与储存于计算机3内的三维模型进行尺寸对比,来进行竖直方向的定位。
28.其中,所述驱动机构11包括与plc处理器2电性连接的回转电机、变幅电机和起升电机,通过回转电机、变幅电机和起升电机来控制抓取机构12的移动,回转电机控制抓取机构12的水平位置,变幅电机控制抓取机构12的幅度,起升电机控制抓取机构12的高度。
29.所述抓取机构12包括吊钩121和吊臂122,所述吊钩121铰接于吊臂122一端,吊钩121包括相互铰接的夹爪。其中,吊臂122另一端与塔吊本体1连接随着塔吊本体1的运动而运动,所述夹爪为铰接结构,可以在夹取货物时合拢,夹爪穿过吊环来进行货物的搬运。
30.所述摄像头组件13包括安装支架131和摄像头本体132,所述安装支架131包括固定架1311和铰接架1312,所述固定架1311固定于夹爪上,所述铰接架1312铰接于固定架1311上,摄像头本体132固定于铰接架1312上,所述摄像头本体132的镜头部分始终朝下,且摄像头本体132的重心与固定架1311和铰接架1312的交界处的连线为竖直状。其中,固定架1311焊接于夹爪上,铰接架1312与固定架1311铰接,在抓取机构12运动过程中铰接架1312为晃动结构,由于重力作用,摄像头本体132的镜头部分始终朝下,即使夹爪张开或者闭合摄像头本体132也是始终朝下。
31.超声波接收器14设置于吊臂122上,超声波接收器14整体水平设置,超声波接收器14的接收面朝下,由于吊臂122在运动过程中只有水平方向的转动和竖直方向的移动,可以保证超声波接收器14始终朝下设置,方便接收超声波发射器15发出的超声波。
32.所述超声波发射器15为直线超声波发射器,超声波发射器15整体水平设置,其发射面朝上,通过发射面发射直线型的超声波,一旦超声波接收器14接收到超声波发射器15发出的超声波,则说明超声波发射器15与超声波接收器14在竖直方向相对设置。
33.所述超声波接收器14接收设置于货物放置处的超声波发射器15发出的超声波时,所述超声波发射器15与超声波接收器14正对设置,其外形尺寸相同,超声波接收器14的接收面朝向超声波发射器15的发射面。
34.货物放置处的货物上设有与吊钩121匹配的吊环,方便吊钩121的夹爪记性抓取,所述吊环为竖直设置,夹爪可以穿进吊环中部的空心结构内,实现货物的抓取。
35.还包括无线通讯模块4,所述摄像头组件13和超声波接收器14通过无线通讯模块4与plc处理器2连接,由于摄像头组件13和超声波接收器14与plc处理器2距离较远,使用无线通讯模块4可以快速的进行数据交流,同时也可以避免线路在运动过程中的损坏。
36.另外,起升电机电性连接变频器,变频器电性连接plc处理器2,超声波发射器15与超声波接收器14通过发射超声波进行距离测量,当距离检测小于2米时,plc处理器2发送指令给变频器输出恒定10hz频率(常规塔机电机的频率范围一般是0
‑
80hz左右,0为停止,80为最高速)给起升电机缓慢运动直至使吊钩121稳定精确到达吊物吊环处起升电机停止运动。使用慢就位技术可以更准确的到达目标位置。
37.本实用新型在使用时,若需要将货物从a地搬运到a1地,首先,plc处理器2发送命令给回转电机使吊臂122在空间内移动直至超声波接收器14接收到超声波发射器15发出的超声波,说明超声波接收器14与超声波发射器15在竖直方向上相对,即吊钩121位于货物的正上方,此时,通过摄像头本体132进行拍摄,摄像头本体132每0.1秒拍摄一张图片传给计算机3进行实时三维建模并实时对比货物和提前储存于计算机3中货物的形状,直至两者形状和尺寸一致时停止,此时,三维建模的模型与提前储存于计算机3中的模型大小相同(为保证摄像头本体132不会直接接触到货物或者吊环,本实施例中设置一个阈值,为1%,只要三维建模的模型与提前储存于计算机3中的模型尺寸相差小于1%就停止向下的运动),即摄像头本体132与货物距离极为接近,plc处理器提前控制吊钩121张开,并在摄像头本体132停止向下运动后合拢,此时,夹爪会穿进吊环中部的空心结构内,实现货物的抓取。然后,plc处理器会记录下摄像头本体132向下运动的时间a2,并控制塔吊本体1进行转动,所述货物放置地a1上也设有超声波发射器15,当超声波接收器14接收到超声波发射器15发出的超声波时,说明到达a1地的正上方,此时,将吊钩121向下以同样的速度运动a2时间,即可
将货物平稳的放置于a1处,松开夹爪后升起吊钩121,完成整个运动过程。
38.以上仅是本实用新型的优选实施方式,本实用新型的保护范围以权利要求所限定的范围为准,本领域技术人员在不脱离本实用新型的精神和范围内做出的若干改进和润饰,也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1