潜伏顶升自动导引车转向机构和潜伏顶升自动导引车的制作方法
1.本实用新型涉及机械制造技术领域,尤其涉及一种潜伏顶升自动导引车转向机构和潜伏顶升自动导引车。
背景技术:
2.随着现代仓库自动化程度的提高,潜伏顶升自动导引车得到了越来越多的使用。潜伏顶升自动导引车即潜伏顶升agv(automated guided vehicle,自动导引车),其能够潜伏到目标(如物料架)底部,利用顶升机构将目标顶起,从而实现物料的运输。目前,潜伏顶升自动导引车在转向的过程中,需要转向轮带动整个机身进行旋转,这种转向方式增加了潜伏顶升自动导引车的控制难度,功耗较大,特殊环境下还会因较大的旋转半径(潜伏顶升自动导引车转向时所占用空间对应的半径)受到空间限制。
技术实现要素:
3.有鉴于此,本实用新型实施例提供一种潜伏顶升自动导引车转向机构和潜伏顶升自动导引车,能够通过转动轮原地转动而机身不转动的方式实现潜伏顶升自动导引车的转向。
4.为实现上述目的,根据本实用新型的一个方面,提供了一种潜伏顶升自动导引车转向机构。
5.本实用新型实施例的潜伏顶升自动导引车转向机构可包括:转向电机,提供转向所需的动力;第一传动构件,与所述转向电机的输出轴连接,用于传递所述转向电机的输出轴的转动;第二传动构件,与第一传动构件以及所述潜伏顶升自动导引车的转向轮连接,用于将第一传动构件输出的转动传递到所述转向轮,使所述转向轮沿垂直于地面的转动轴原地转动预设角度,从而使所述潜伏顶升自动导引车转向。
6.可选地,第二传动构件为多个,每一第二传动构件连接一个转向轮,不同的第二传动构件连接不同的转向轮。
7.可选地,第一传动构件为具有一个主动轮和多个从动轮的锥齿轮。
8.可选地,所述主动轮与所述转向电机的输出轴周向固定,所述从动轮的数量与所述转向轮的数量相等。
9.可选地,所述多个从动轮在所述主动轮上等间隔排布。
10.可选地,所述第二传动构件为具有主动轴和从动轴的万向联轴器。
11.可选地,每一万向联轴器的主动轴与第一传动构件的一个从动轮周向固定;每一万向联轴器的从动轴与一个转向轮固定,作为该转向轮的所述转动轴。
12.可选地,所述第二传动构件为具有一个主动轮和一个从动轮的锥齿轮。
13.可选地,每一第二传动构件的主动轮通过第一转轴与第一传动构件的一个从动轮周向固定;每一第二传动构件的从动轮与一个转向轮的转动轴周向固定。
14.为实现上述目的,根据本实用新型的另一方面,提供了一种潜伏顶升自动导引车。
15.本实用新型实施例的潜伏顶升自动导引车包括所述潜伏顶升自动导引车转向机构。
16.根据本实用新型的技术方案,上述实用新型中的一个实施例具有如下优点或有益效果:
17.设计包括转向电机、第一传动构件、第二传动构件的潜伏顶升自动导引车转向机构,转向电机用于提供转向所需的动力,第一传动构件与转向电机的输出轴连接来传递转向电机输出轴的转动。第二传动构件与第一传动构件以及转向轮连接,用于将第一传动构件输出的转动传递到转向轮,使转向轮沿垂直于地面的转动轴原地转动预设角度,从而使潜伏顶升自动导引车转向。通过以上设计,能够仅通过转向轮的原地转动直接改变潜伏顶升自动导引车的移动方向,转向过程中机身不需要转动,由此便于潜伏顶升自动导引车的转动控制,减小功耗,提升续航能力,并减少转向时的空间占用。
18.上述的非惯用的可选方式所具有的进一步效果将在下文中结合具体实施方式加以说明。
附图说明
19.附图用于更好地理解本实用新型,不构成对本实用新型的不当限定。其中:
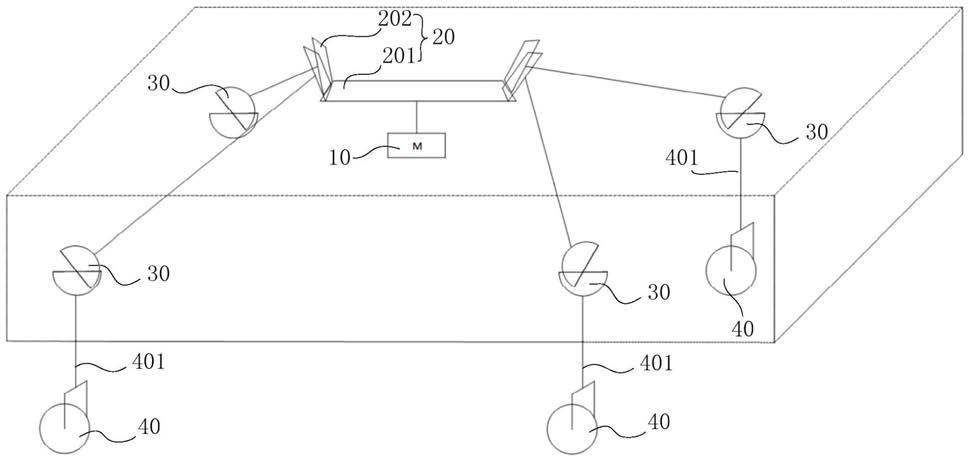
20.图1是本实用新型实施例中潜伏顶升自动导引车转向机构的结构示意图;
21.图2是本实用新型实施例的潜伏顶升自动导引车转向示意图。
22.附图标记说明:
23.10转向电机30第二传动构件20第一传动构件40转动轮201第一传动构件的主动轮401转动轴202第一传动构件的从动轮
ꢀꢀ
具体实施方式
24.以下结合附图对本实用新型的示范性实施例做出说明,其中包括本实用新型实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本实用新型的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
25.可以理解,本实用新型所使用的术语“第一”、“第二”等在本文中用于描述各种部件,但这些部件不受上述术语限制。上述术语仅用于将一个部件与另一个部件区分。举例而言,在不脱离本实用新型范围的情况下,可以将第一传动构件称为第二传动构件,也可以将第二传动构件称为第一传动构件,第一传动构件与第二传动构件都是传动构件,但二者不是同一传动构件。
26.需要指出的是,以下说明中的“设置”、“安装”、“连接”可以表示二物之间的固定配合,也可以表示非固定配合(例如滑动连接);可以表示可拆卸配合(例如螺栓螺母连接),也可以表示不可拆卸的配合(例如焊接);可以表示直接配合,也可以表示以第三物为媒介的间接配合。此外,在不冲突的情况下,本实用新型的实施例以及实施例中的技术特征可以相互结合。
27.图1是本实用新型实施例中潜伏顶升自动导引车转向机构的结构示意图,如图1所示,本实用新型实施例的潜伏顶升自动导引车转向机构可以包括:转向电机10、第一传动构件20和第二传动构件30。
28.具体地,转向电机10可以采用伺服电机,用于提供潜伏顶升自动导引车转向所需的动力。第一传动构件20与第二传动构件30均是在不同转轴之间传递动力的部件,第一传动构件20用于将转向电机10的动力传递到第二传动构件30,第二传动构件30用于将动力传递到潜伏顶升自动导引车的转动轮40以实现潜伏顶升自动导引车转向。其中,上述转动轮40可以是潜伏顶升自动导引车的全部车轮,也可以是专为实现转动功能的部分车轮,转动轮40除具有在地面滚动所需的水平方向转轴以外,还具有垂直于地面的转动轴401,转动轮40沿该转动轴401转动能够改变转动轮40在地面的方位角,从而实现潜伏顶升自动导引车转向。
29.实际应用中,第一传动构件20与转向电机10的输出轴连接,用于将转向电机10输出轴的转动向第二传动构件30传递。第二传动构件30与第一传动构件20以及潜伏顶升自动导引车的转向轮40连接,用于将第一传动构件20输出的转动传递到转向轮40,使转向轮40沿垂直于地面的上述转动轴401原地转动预设角度,从而使潜伏顶升自动导引车转向。可以理解的是,以上原地转动指的是转动轮40在停止滚动的状态下沿上述转动轴401的转动,在该转动过程中,上述转动轴401也可以同步转动。
30.在本实用新型实施例中,第一传动构件20可以是具有一个主动轮201和多个从动轮202的锥齿轮,可以理解,在机械技术领域,锥齿轮是用于传递两相交轴之间的运动和动力的部件,两相交轴之间的交角可以等于90
°
也可以大于或小于等于90
°
。在第一传动构件20中,主动轮201与转向电机10的输出轴通过键连接方式(如平键或花键)周向固定,以便传递转向电机10的动力;从动轮202的数量与转向轮40的数量相等,每一从动轮202对应一个不同的转动轮40(即,每一从动轮202对应一个转动轮40,不同的从动轮202对应不同的转动轮40),以便通过第二传动构件30将动力传递到相应的转动轮40。较佳地,以上多个从动轮202可以在主动轮201上等间隔啮合,从而产生更好的传动效果。
31.作为一个优选方案,第二传动构件30为多个,其数量与第一传动构件20中从动轮202的数量以及转动轮40数量相等。每一第二传动构件30与第一传动构件20的一个传动轮202以及一个转动轮40形成对应关系,即,每一第二传动构件30连接第一传动构件20的一个传动轮202和一个转动轮40,不同的第二传动构件30连接不同的传动轮202和不同的转动轮40。
32.具体应用场景中,第二传动构件30可以是万向联轴器,在机械技术领域,万向联轴器能够在两根转轴存在夹角的情况下可靠地传递转矩和运动,这两根转轴即为万向联轴器的主动轴和从动轴。在一个实施例中,每一万向联轴器的主动轴与第一传动构件20的相应从动轮202通过键连接方式周向固定,每一万向联轴器的从动轴作为相应转动轮40的前述转动轴401,以实现万向联轴器与转向轮40的固定。
33.基于以上结构,本实用新型实施例的潜伏顶升自动导引车转向机构的工作原理如下:当潜伏顶升自动导引车需要进行某角度(可称为第一角度)的转向时,控制器根据第一角度计算转向电机10输出轴的旋转角度,并控制转向电机10输出轴执行以上旋转,由此带动第一传动构件20的主动轮201转动,进而带动第一传动构件20的从动轮202转动,进而带
动第二传动构件30的主动轴转动,进而带动第二传动构件30的从动轴(即转动轮40的转动轴401)转动,垂直于地面的该从动轴带动转动轮40沿该从动轴原地转动一个角度(该角度等于第一角度),由此实现潜伏顶升自动导引车转向。基于以上转动方式的转向角度(即第一角度)可以是90
°
,也可以大于或小于90
°
。此外,以上过程中,多个转动轮40可以同步转动,也可以不不同步转动。
34.实际应用中,第二传动构件30还可以是具有一个主动轮和一个从动轮的锥齿轮,在该结构中,每一第二传动构件30的主动轮通过第一转轴与第一传动构件20的相应从动轮202周向固定,即第一转轴基于键连接方式分别与第二传动构件30的主动轮以及第一传动构件20的从动轮202周向固定;每一第二传动构件30的从动轮通过键连接方式与相应转向轮40的转动轴401周向固定。
35.基于以上结构,本实用新型实施例的潜伏顶升自动导引车转向机构的工作原理如下:当潜伏顶升自动导引车需要进行某角度(可称为第一角度)的转向时,控制器根据第一角度计算转向电机10输出轴的旋转角度,并控制转向电机10输出轴执行以上旋转,由此带动第一传动构件20的主动轮201转动,进而带动第一传动构件20的从动轮202转动,进而通过第一转轴带动第二传动构件30的主动轮转动,进而带动第二传动构件30的从动轮转动,进而带动转动轮40的转动轴401转动,从而使转动轮40沿该转动轴401原地转动一个角度(该角度等于第一角度),由此实现潜伏顶升自动导引车转向。基于以上转动方式的转向角度(即第一角度)可以是90
°
,也可以大于或小于90
°
。
36.图2是本实用新型实施例的潜伏顶升自动导引车转向示意图,如图2所示,潜伏顶升自动导引车在初始状态沿南北方向移动(四个转动轮均为南北向),当需要转动90
°
时(即转为东西向),转向电机10驱动第一传动构件20的主动轮201逆时针转动,进而带动第一传动构件20的四个从动轮202顺时针转动(以上逆时针、顺时针基于同一观察方向而言),最终带动四个转向轮40转动90
°
,使潜伏顶升自动导引车可沿东西方向移动。
37.在本实用新型实施例中,进一步提供一种潜伏顶升自动导引车,该潜伏顶升自动导引车中设置有前述潜伏顶升自动导引车转向机构。
38.本领域技术人员应该知悉,说明书中所描述的上述实施例均属于优选实施例,所涉及的部件和模块并不一定是实现本实用新型所必须的。
39.在本实用新型实施例的技术方案中,设计包括转向电机、第一传动构件、第二传动构件的潜伏顶升自动导引车转向机构,转向电机用于提供转向所需的动力,第一传动构件与转向电机的输出轴连接来传递转向电机输出轴的转动。第二传动构件与第一传动构件以及转向轮连接,用于将第一传动构件输出的转动传递到转向轮,使转向轮沿垂直于地面的转动轴原地转动预设角度,从而使潜伏顶升自动导引车转向。通过以上设计,能够仅通过转向轮的原地转动直接改变潜伏顶升自动导引车的移动方向,转向过程中机身不需要转动,由此便于潜伏顶升自动导引车的转动控制,减小功耗,提升续航能力,并减少转向时的空间占用。
40.上述具体实施方式,并不构成对本实用新型保护范围的限制。本领域技术人员应该明白的是,取决于设计要求和其他因素,可以发生各种各样的修改、组合、子组合和替代。任何在本实用新型的精神和原则之内所作的修改、等同替换和改进等,均应包含在本实用新型保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1