全自动取料、放料一体机
1.本实用新型涉及机械加工领域,提出全自动取料、放料一体机。
背景技术:
2.金属物料板在加工过程中,需要首先将物料板放置在加工设备上,加工完成后再将工件移动到工件储存箱内、或者进行下一道工序;现有的物料转移设备一般为上料时使用上料机,下料时使用下料机,使用多套设备完成,结构复杂,且工件在转移过程中无法做到完全同步,因此会影响上料、下料质量,同时影响加工效率;
3.且金属物料板之间会存在吸力,物料板在被吸起的过程中极易发生同时吸取多件物料的情况,无法保证上料质量,进而延误加工。
技术实现要素:
4.本实用新型提出全自动取料、放料一体机,通过将上料机械手与下料机械手设置在同一设备上,并使用同一电机带动转动,实现了上料和下料的同步,使得上料、加工、下料无缝衔接,极大提高了加工效率和加工质量;同时上料使用分磁器将物料板之间进行分层,上料更加精准,一次只吸取一个物料板,为后续加工提供了保障;且上料时为垛料上料,后续的吸取、分层全部为控制装置进行控制,实现了设备的完全自动化;上料机构中还设置有高度传感器,垛料举升气缸中设置有用于限位的电磁感应接近开关,自动提醒工人进行垛料上料;整个过程中如果发生故障报警器会及时进行报警,物料自动停机,使用更加安全放心。
5.为了实现上述目的,本实用新型提出了全自动取料、放料一体机,包括:控制装置、阶梯型紧凑框架、上料机构及物料移动机构,所述上料机构及所述物料移动机构均与所述控制装置连接,所述控制装置、上料机构及物料移动机构均安装于所述阶梯型紧凑框架上;
6.所述物料移动机构包括旋转机构、升降机构、第一移动机械手及第二移动机械手,所述第一移动机械手与所述第二移动机械手均安装于所述旋转机构上,第一移动机械手与第二移动机械手之间设置有夹角,所述旋转机构安装于所述升降机构上;
7.所述升降机构包括升降架、升降螺纹杆及升降电机,所述升降架安装于所述阶梯型紧凑框架上,所述升降电机输出轴朝下的安装于所述阶梯型紧凑框架上,所述升降螺纹杆通过同步轮减速机构与所述升降电机的输出轴连接,所述升降螺纹杆与所述升降电机平行设置;
8.所述旋转机构包括旋转电机、rv谐波减速机构、联轴器及旋转轴,所述旋转电机输出轴朝上的安装于所述升降架上,所述rv谐波减速机构安装于所述旋转电机的输出轴上,所述旋转轴通过所述联轴器与所述旋转电机的输出轴连接;
9.所述第一移动机械手包括第一t形机械臂、第一伸长爪、第一吸盘及第一气动装置,所述第一t形机械臂的竖臂安装于所述旋转轴上,所述第一伸长爪安装于所述第一t形机械臂的横臂上,所述第一吸盘安装于所述第一伸长爪底部,所述第一吸盘与所述第一气
动装置连接,所述第一气动装置安装于所述阶梯型紧凑框架上;
10.所述第二移动机械手包括第二t形机械臂、第二伸长爪、第二吸盘及第二气动装置,所述第二t形机械臂的竖臂安装于所述旋转轴上,所述第二伸长爪安装于所述第二t形机械臂的横臂上,所述第二吸盘安装于所述第二伸长爪的底部,所述第二吸盘与所述第二气动装置连接,所述第二气动装置安装于所述阶梯型紧凑框架上;
11.所述升降电机、所述旋转电机、所述第一气动装置及所述第二气动装置均与所述控制装置连接。
12.进一步,所述第一t形机械臂包括旋转部及第一伸长部,所述旋转部安装于所述旋转轴上,所述第一伸长部安装于所述旋转部端部,所述第一伸长部为第一伸缩液压缸,所述第一伸缩液压缸与所述控制装置连接;
13.所述第二t形机械臂包括旋转部、伸长部及折叠部,所述旋转部安装于所述旋转轴上,所述伸长部安装于所述旋转部端部,所述折叠部通过合页铰接于所述伸长部端部;
14.所述伸长部为伸缩气缸,所述伸缩气缸与所述控制装置连接。
15.进一步,所述第一伸长爪包括第一竖杆、第一横杆及第一支撑杆,所述第一竖杆安装于所述第一t形机械臂端部且与所述第一t形机械臂的竖杆平行,所述第一横杆可调节的安装于所述第一竖杆上,所述第一支撑杆可拆卸、可调节的安装于所述第一横杆上,所述第一吸盘安装于所述第一支撑杆底端;
16.同理,所述第二伸长爪包括第二竖杆、第二横杆及第二支撑杆,所述第二竖杆安装于所述第二t形机械臂端部且与所述第二t形机械臂的竖杆平行,所述第二横杆可调节的安装于所述第二竖杆上,所述第二支撑杆可拆卸、可调节的安装于所述第二横杆上,所述第二吸盘安装于所述第二支撑杆底端。
17.进一步,所述第一竖杆上设置有第一安装孔,所述第一横杆上设置有第一安装槽,所述第一安装槽通过第一限位螺栓限位于所述第一安装孔内;
18.所述第一支撑杆为第一螺纹支撑杆,所述第一横杆上设置有第一调节孔,所述第一螺纹支撑杆顶端的螺纹部杆通过第一调节螺母安装于所述第一调节孔内,同时所述第一螺纹支撑杆的光杆上套装有第一弹簧;
19.同理,所述第二竖杆上设置有第二安装孔,所述第二横杆上设置有第二安装槽,所述第二安装槽通过第二限位螺栓限位于所述第二安装孔内;
20.所述第二支撑杆为第二螺纹支撑杆,所述第二横杆上设置有第二调节孔,所述第二螺纹支撑杆顶端的螺纹部杆通过第二调节螺母安装于所述第二调节孔内,同时所述第二螺纹支撑杆的光杆上套装有第二弹簧。
21.进一步,所述旋转部上安装有第一测压仪,所述第一测压仪设置于所述第一气动装置与所述第一吸盘连接的管路上,所述第一测压仪与所述控制装置连接;
22.同理,所述旋转部上安装有第二测压仪,所述第二测压仪设置于所述第二气动装置与所述第二吸盘连接的管路上,所述第二测压仪与所述控制装置连接。
23.进一步,所述上料机构包括垛料举升液压缸、限位板、垛料承载板、承载板升降导杆、分磁器、定位杆及定位气缸;
24.所述垛料举升液压缸安装于所述阶梯型紧凑框架的矮端的底部,所述限位板安装于所述阶梯型紧凑框架上且位于所述垛料举升液压缸顶部,所述垛料举升液压缸的活塞杆
顶部穿过所述限位板,所述垛料承载板安装于所述垛料举升液压缸的活塞杆顶端,所述承载板升降导杆固定于所述垛料承载板底部,所述承载板升降导杆底端被限位于所述限位板底部;
25.所述阶梯型紧凑框架的顶部设置有安装板,所述限位板位于所述安装板下方,所述安装板上设置有上料孔,所述上料孔的形状与物料的形状相同;
26.所述定位杆安装于所述安装板上且位于所述上料孔的相邻的三边的外周上;
27.所述定位气缸位于所述上料孔的另一边的外周上;
28.所述分磁器安装于所述阶梯型紧凑框架上,所述分磁器与所述垛料承载板相邻。
29.进一步,所述分磁器通过分磁器支撑杆安装于所述安装板上;
30.所述分磁器支撑杆上还安装有高度传感器,所述高度传感器朝向所述垛料承载板;
31.所述高度传感器与所述控制装置连接。
32.进一步,所述垛料举升液压缸内上下两端均设置有用于限位的电磁感应接近开关。
33.进一步,所述第一吸盘及第二吸盘均设置有一个或多个,相应的,所述第一支撑杆及所述第二支撑杆均设置有一个或多个。
34.更进一步,所述阶梯型紧凑框架上还设置有报警装置,所述报警装置与所述控制装置连接。
35.本实用新型通过将上料机械手与下料机械手设置在同一设备上,并使用同一电机带动转动,实现了上料和下料的同步,使得上料、加工、下料无缝衔接,极大提高了加工效率和加工质量;同时上料使用分磁器将物料板之间进行分层,上料更加精准,一次只吸取一个物料板,为后续加工提供了保障;且上料时为垛料上料,后续的吸取、分层全部为控制装置进行控制,实现了设备的完全自动化;上料机构中还设置有高度传感器,垛料举升气缸中设置有用于限位的电磁感应接近开关,自动提醒工人进行垛料上料;整个过程中如果发生故障报警器会及时进行报警,物料自动停机,使用更加安全放心。
附图说明
36.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
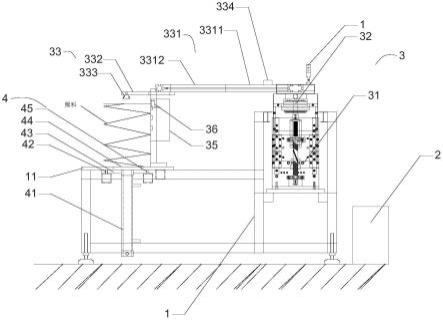
37.图1为本实用新型具体实施例中的全自动取料、放料一体机的整体结构主视图;
38.图2为图1所示的全自动取料、放料一体机的结构侧视图;
39.图3为图1、图2所示的全自动取料、放料一体机的第一伸长爪的结构示意图;
40.图4为图1、图2所示的全自动取料、放料一体机的第二伸长爪的结构示意图;
41.图5为图1、图2所示的全自动取料、放料一体机的上料机构的结构示意图。
具体实施方式
42.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的
实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
43.在本实用新型的具体实施例中,见图1-图5,全自动取料、放料一体机,包括:控制装置2、阶梯型紧凑框架1、上料机构4及物料移动机构3,所述上料机构4及所述物料移动机构3均与所述控制装置2连接,所述控制装置2、上料机构4及物料移动机构3均安装于所述阶梯型紧凑框架1上;
44.所述物料移动机构3包括旋转机构32、升降机构31、第一移动机械手33 及第二移动机械手34,所述第一移动机械手33与所述第二移动机械手34均安装于所述旋转机构32上,所述旋转机构32安装于所述升降机构31上;
45.第一移动机械手33与第二移动机械手34之间设置有夹角,其中第一移动机械手33用于将原材料吸起,并将原材料放置在加工设备上进行加工,第二移动机械手34用于将加工完成后的工件吸起并放置在下一道工序中的设备上,因此两者之间的夹角根据实际情况进行设定,一般为90
°
左右;
46.且在工作过程中,第一移动机械手33与第二移动机械手34的动作同步,即同时吸取、同时释放。
47.在本实用新型的具体实施例中,见图1-图5,所述升降机构31包括升降架 311、升降螺纹杆312及升降电机313,所述升降架311安装于所述阶梯型紧凑框架1上,所述升降电机313输出轴朝下的安装于所述阶梯型紧凑框架1上,所述升降螺纹杆312通过同步轮减速机构314与所述升降电机313的输出轴连接,所述升降螺纹杆312与所述升降电机313平行设置,所述升降电机313与所述控制装置2连接;
48.升降机构313用于调节第一移动机械手33与第二移动机械手34的高度,从而适应不同高度的设备;
49.第一移动机械手33与第二移动机械手34的吸起高度相同,保证第一移动机械手33与第二移动机械手34动作同步,同时适用同一台加工设备
50.螺纹杆动力传送稳定,保证了第一移动机械手33与第二移动机械手34上下移动时的稳定性。
51.在本实用新型的具体实施例中,见图1-图5,所述旋转机构32包括旋转电机321、rv谐波减速机构322、联轴器323及旋转轴324,所述旋转电机321输出轴朝上的安装于所述升降架311上,所述rv谐波减速机构322安装于所述旋转电机321的输出轴上,所述旋转轴324通过所述联轴器323与所述旋转电机 321的输出轴连接;
52.旋转机构321用于带动第一移动机械手33与第二移动机械手34进行旋转动作,实现物料的转移;
53.同时,第一移动机械手33与第二移动机械手34通过同一个旋转轴324带动动作,使用前根据设备需求将两者之间的夹角设定好,工作时由旋转轴324带动同步动作。
54.在本实用新型的具体实施例中,见图1-图5,所述第一移动机械手33包括第一t形机械臂331、第一伸长爪332、第一吸盘333及第一气动装置334,所述第一t形机械臂331的竖臂安装于所述旋转轴324上,所述第一伸长爪332 安装于所述第一t形机械臂331的横臂上,所述第一吸盘333安装于所述第一伸长爪332底部,所述第一吸盘333与所述第一气动装置
334连接,所述第一气动装置334安装于所述阶梯型紧凑框架1上,所述第一气动装置334与所述控制装置2连接;
55.第一移动机械手33的作用是将工件从上料机构4上吸起,并将工件放置在加工设备上,其吸起的动作通过第一气动装置334带动第一吸盘333完成,移动动作由第一t形机械臂331带动完成,第一伸长爪的作用是安装第一吸盘333,第一吸盘333设置有多个,由于工件的长度不同,因此多个第一吸盘333的位置需要根据原材料的大小进行适应性设置,通过设置第一伸长爪332来调节第一吸盘333的位置,扩大了设备的使用范围,使得设备能够用于不同大小规格的工件的取放工作。
56.在本实用新型的具体实施例中,见图1-图5,所述第二移动机械手34包括第二t形机械臂341、第二伸长爪342、第二吸盘343及第二气动装置344,所述第二t形机械臂341的竖臂安装于所述旋转轴324上,所述第二伸长爪342 安装于所述第二t形机械臂341的横臂上,所述第二吸盘343安装于所述第二伸长爪342的底部,所述第二吸盘343与所述第二气动装置344连接,所述第二气动装置344安装于所述阶梯型紧凑框架1上,所述第二气动装置344与所述控制装置2连接;
57.第二移动机械手34的工作原理同第一移动机械手33。
58.在本实用新型的具体实施例中,见图1-图5,所述第一t形机械臂331包括旋转部3311及第一伸长部3312,所述旋转部3311安装于所述旋转轴324上,所述第一伸长部3312安装于所述旋转部3311端部,所述第一伸长部3312为第一伸缩液压缸,所述第一伸缩液压缸与所述控制装置2连接;
59.将第一t形机械臂331设置成伸缩臂后,在第一t形机械臂331为收缩状态时,占用空间小,便于运输,具体制作设备时,可以根据实际的使用需求,将第一t形机械臂的伸长长度作相应的改变,从而使用不同加工设备的需求,又能满足运输需求。
60.在本实用新型的具体实施例中,见图1-图5,所述第二t形机械臂341包括第二旋转部3411、第二伸长部3412及折叠部3413,所述第二旋转部3411安装于所述旋转轴324上,所述第二伸长部3412安装于所述第二旋转部3411端部,所述折叠部3413通过合页3414铰接于所述第二伸长部3412端部,所述第二伸长部3412为第二伸缩液压缸,所述第二伸缩液压缸与所述控制装置2连接;
61.第二t形机械臂341设置成伸缩臂后的目的与第一t形机械臂331相同,同时在运输时,第一t形机械臂331的竖臂朝向上料机构4一侧且位于上料机构4 上方,通过合理的设计长度,第一t形机械臂331不会伸出阶梯型紧凑框架1,此时由于第二t形机械臂341与第一t形机械臂331之间设置有夹角,因此第二 t形机械臂341会伸出阶梯型紧凑框架1外,进而增加了占地面积,运输时非常不便,基于此,将第二t形机械臂341同时设置成可折叠的臂,即设置折叠部3413,需要运输时,将折叠部3413折叠起来,极大减小了占用面积,运输更加方便。
62.在本实用新型的具体实施例中,见图1-图5,第一伸长爪332用来安装第一吸盘333,由于工件的规格不同,需要对第一吸盘333的位置进行适应性调节,因此将第一伸长爪332的结构进行适应性设计,以便于吸盘的调节,具体为:所述第一伸长爪332包括第一竖杆3321、第一横杆3322及第一支撑杆3323,所述第一竖杆3321安装于所述第一t形机械臂331端部且与所述第一t形机械臂331 平行,所述第一横杆3322可调节的安装于所述第一竖杆
3321上,所述第一支撑杆3323可拆卸、可调节的安装于所述第一横杆3322上,所述第一吸盘333安装于所述第一支撑杆3323底端;
63.所述第一竖杆3321上设置有第一安装孔33211,所述第一横杆3322上设置有第一安装槽33221,所述第一安装槽33221通过第一限位螺栓33222限位于所述第一安装孔33211内,通过移动第一横杆3322,使第一安装槽33221在不同的位置被限位,实现第一横杆3322位置的调节,从而带动第一吸盘323进行相应的移动;
64.同时,所述第一支撑杆3323为第一螺纹支撑杆3323,所述第一横杆3322 上设置有第一调节孔33222,所述第一螺纹支撑杆3323顶端的螺纹部杆通过第一调节螺母33231安装于所述第一调节孔33222内,同时所述第一螺纹支撑杆 3323的光杆上套装有第一弹簧3324,设置第一弹簧3324后能够有效缓冲物料在吸起过程中受到的吸力,放置物料时能够有效防止物料回弹。
65.在本实用新型的具体实施例中,见图1-图5,同理,所述第二伸长爪342包括第二竖杆3421、第二横杆3422及第二支撑杆3423,所述第二竖杆3421安装于所述第二t形机械臂341端部且与所述第二t形机械臂341平行,所述第二横杆3422可调节的安装于所述第二竖杆3421上,所述第二支撑杆3423可拆卸、可调节的安装于所述第二横杆3422上,所述第二吸盘343安装于所述第二支撑杆3423底端;
66.同理,所述第二竖杆3421上设置有第二安装孔34211,所述第二横杆3422 上设置有第二安装槽34221,所述第二安装槽34221通过第二限位螺栓34212限位于所述第二安装孔34211内;
67.所述第二支撑杆3423为第二螺纹支撑杆,所述第二横杆3422上设置有第二调节孔34222,所述第二螺纹支撑杆3423顶端的螺纹部杆通过第二调节螺母 34231安装于所述第二调节孔34222内,同时所述第二螺纹支撑杆3423的光杆上套装有第二弹簧3424。
68.在本实用新型的具体实施例中,见图1-图5,所述旋转部3311上安装有第一测压仪335,所述第一测压仪335设置于所述第一气动装置334与所述第一吸盘333连接的管路上,所述第一测压仪335与所述控制装置2连接;
69.同理,所述第二旋转部3411上安装有第二测压仪345,所述第二测压仪345 设置于所述第二气动装置344与所述第二吸盘343连接的管路上,所述第二测压仪345与所述控制装置2连接;
70.在吸取不同的工件时,用到的吸力大小不同,设置第一侧压仪335与第二测压仪345后,能够调整第一吸盘333与第二吸盘343的吸力,调节好后固定压力吸取同批工件即可,整个调节过程均通过控制装置控制,简单、高效,且压力更加精准,实现了调节的自动化。
71.在本实用新型的具体实施例中,见图1-图5,所述上料机构4包括垛料举升液压缸41、限位板43、垛料承载板44、承载板升降导杆、分磁器46、定位杆 47及定位气缸48;
72.所述垛料举升液压缸41安装于所述阶梯型紧凑框架1的矮端的底部,所述限位板43安装于所述阶梯型紧凑框架1上且位于所述垛料举升液压缸41顶部,所述垛料举升液压缸41的活塞杆顶部穿过所述限位板43,所述垛料承载板44 底面中心处安装于所述垛料举升液压缸41的活塞杆顶端,承载板升降导杆设置有两个,分别为承载板升降导杆42与承载板升降导杆45,承载板升降导杆42 与承载板升降导杆45相对于垛料举升液压缸41对称固
定于所述垛料承载板44 底部,所述承载板升降导杆42与承载板升降导杆45底端被限位于所述限位板 43底部;
73.所述阶梯型紧凑框架1的顶部设置有安装板11,所述限位板43位于所述安装板11下方,所述安装板11上设置有上料孔111,所述上料孔111的形状与物料的形状相同;
74.所述定位杆47安装于所述安装板11上且位于所述上料孔111的相邻的三边的外周上;
75.所述定位气缸48位于所述上料孔的另一边的外周上;
76.所述分磁器46安装于所述阶梯型紧凑框架1上,所述分磁器46与所述垛料承载板44相邻;
77.在上料时,如果一个一个上料非常繁琐,不仅影响上料时间,也会损耗设备、浪费电能等资源,因此选择垛料上料,没垛物料中有多个物料,同时主要吸取物料为金属物料板;
78.同时多个物料一起上料,吸取时容易同时吸取多件物料板,因此使用分磁器 46进行分料,在分磁器46的作用下,物料板之间会存在一定的空隙,且在磁力的作用下不会偏移、不会掉落,同时由于存在空隙,第一吸盘与第二吸盘吸取物料板时,只能吸起一个物料板,极大提高了吸取质量;
79.本设备中的吸盘的高度在工作前就已经调节好,因此高度是固定不变的,在吸取走一个工件后,下面的工件高度无法满足吸取要求时,垛料举升液压缸向上顶起一次,直到所有的物料板均被加工完成,完成一轮工作,再次放置一垛物料板循环上述上料工作。
80.在本实用新型的具体实施例中,见图1-图5,所述分磁器46通过分磁器支撑杆461安装于所述安装板11上;
81.所述分磁器支撑杆461上还安装有高度传感器49,所述高度传感器49朝向所述垛料承载板44;
82.所述高度传感器49与所述控制装置2连接;
83.控制装置2中设置好物料的吸取高度,在高度以上,高度传感器49能够感应到垛料,当垛料的高度低于设定高度时,高度传感器49感应不到垛料,此时垛料举升液压缸41会向上举升垛料,使表层的物料板满足吸取要求,以此循环上料;
84.理想状态下,吸取一个物料板,垛料举升液压缸41将垛料顶升一个物料板厚度的高度。
85.在本实用新型的具体实施例中,见图1-图5,所述垛料举升液压缸41内上下两端均设置有用于限位的电磁感应接近开关,分别为电磁感应接近开关411 和电磁感应接近开关412,即垛料举升液压缸41设置了最大行程,从而限定了一次放置的垛料的总高度。
86.在本实用新型的具体实施例中,见图1-图5,所述第一吸盘333及第二吸盘 343均设置有一个或多个,相应的,所述第一支撑杆3323及所述第二支撑杆3423 均设置有一个或多个;
87.多个吸盘共同吸取,每个吸盘的吸力小,不会使物料板变形,且物料板受力均匀,有效保护了物料板,吸取也更加平稳。
88.在本实用新型的具体实施例中,见图1-图5,所述阶梯型紧凑框架1上还设置有报警装置5,所述报警装置5与所述控制装置2连接,报警装置5会同时发出光信号和声音信号
提醒工作人员,使用时更加安全放心。
89.实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此领域技术的人士能够了解本
技术实现要素:
并加以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1