全自动垛机的制作方法
1.本实用新型涉及垛机设备领域,特别涉及一种全自动垛机。
背景技术:
2.近年来,随着企业的成长发展以及生产规模的扩张,再加上原料、生产、物流等成本的增加,企业也正面临着如何控制成本的难题。目前,服务器主机的堆放输送线结构复杂,自动化程度不够,需要多个工人进行中间的转运工作,成本较高。
3.故需要提供一种全自动垛机来解决上述的问题。
技术实现要素:
4.本实用新型涉及一种全自动垛机,该全自动垛机包括安装架、放料装置以及xyz轴运动装置。放料装置包括底板、支撑机构与放料平台,底板放置在安装架上,放料平台通过支撑机构架设在所述底板上。x轴运动机构与z轴运动机构设置在安装架的一端,x轴运动机构用于驱动所述放料装置沿输送方向移动。y轴运动机构设置在底板上,z轴运动机构驱动y轴运动机构以及放料装置沿安装架进行升降运动,y轴运动机构驱动支撑机构与放料平台移出进料口取料,然后再反转y轴运动机构使得支撑机构、放料平台与放料平台上的测试板以及对应的主机一起回复初始位置,完成全自动化作业,大大降低了人工成本,解决了现有技术中堆放输送线需人工进行中间转运导致成本较高的问题。
5.为解决上述问题,本实用新型的内容为:一种全自动垛机,用于输送测试板以及对应的主机,其包括:
6.安装架:设置有进料口;
7.放料装置:所述放料装置包括底板、支撑机构与放料平台,所述底板放置在所述安装架上,所述放料平台通过所述支撑机构架设在所述底板上,所述支撑机构与所述底板连接;以及,
8.xyz轴运动装置:所述xyz运动装置包括x轴运动机构、y轴运动机构与z轴运动机构;所述x轴运动机构设置在所述安装架的一端,用于驱动所述放料装置沿输送方向移动;所述y轴运动机构设置在所述底板上,所述z轴运动机构设置在所述安装架上,所述z轴运动机构驱动所述y轴运动机构以及所述放料装置沿所述安装架进行升降运动;所述y轴运动机构驱动所述支撑机构与所述放料平台移出所述进料口取料。
9.本实用新型所述的全自动垛机中,所述放料装置还设置有支架,多个所述支架分别设置在所述底板的两端。所述支撑机构包括第一支撑座、中转支撑座以及第二支撑座,所述第一支撑座的两端分别位于多个所述支架上,所述y轴运动机构的输出轴与所述第一支撑座连接。所述中转支撑座的一侧卡设在所述第一支撑座的上方,所述第二支撑座设置有第一卡槽,所述中转支撑座的另一侧与所述第一卡槽卡设连接,所述放料平台位于所述第二支撑座的另一侧。所述y轴运动机构驱动所述第一支撑座滑动带动所述中转支撑座、所述第二支撑座与所述放料平台一起移动。所述放料装置安拆便捷,所述支撑机构层层分级,提
高稳固的效果,同时也提高了所述放料平台的行程。
10.进一步的,所述第一支撑座设置有第一减重槽,所述第一减重槽分别设置在所述第一支撑座的两侧,所述第一减重槽用于减轻所述第一支撑座的自重,便于移动。
11.进一步的,所述第一支撑座、所述中转支撑座、所述第二支撑座的宽度依次增加,所述第一支撑座、所述中转支撑座、所述第二支撑座的厚度依次减小。
12.所述中转支撑座与所述第二支撑座之间搭接稳固,同时也可通过所述第一支撑座的厚度提高所述放料平台的高度。
13.进一步的,所述中转支撑座设置有第二卡槽与第二减重孔,所述第二卡槽与所述第二减重孔分别设置在所述中转支撑座的两侧。所述第二卡槽与所述第二减重孔之间设置有加强块,所述加强块的一侧与所述第一支撑座的一端连接。所述中转支撑座通过所述第二卡槽与所述第一支撑座的一端卡设连接,提高了连接的紧固效果,也可以防止所述中转支撑座摆动;所述第二减重孔减轻了所述中转支撑座的重量,也节约了成本。
14.进一步的,所述放料平台的两端设置有限位块,所述限位块与所述测试板的端部紧贴,防止所述测试板在移动过程中与所述放料平台错位。
15.本实用新型所述的全自动垛机中,所述放料装置还包括连接板,多个所述连接板设置在所述底板背离所述放料平台的一侧。两个所述z轴运动机构分别设置在所述安装架的两侧且位于所述连接板的两端,所述z轴运动机构包括z轴驱动电机、z轴丝杆、固定块以及固定板。所述z轴驱动电机设置在所述安装架上,所述z轴丝杆与所述z轴驱动电机传动连接,所述z轴丝杆靠近所述底板的一端通过所述固定块与所述安装架的一侧连接,所述固定板与所述固定块固定连接,所述固定板的两端分别与所述安装架滑动连接。多个所述连接板的两端分别与两侧的所述固定板连接。两侧的所述z轴运动机构共同抬升所述连接板来抬升所述放料装置,使所述放料装置能平稳升降,避免所述放料平台发生倾斜。
16.进一步的,所述连接板与所述底板连接的一侧设置有限位槽,所述底板位于所述限位槽内,限定了所述底板的位置,避免升降过程中所述底板在所述连接板上随意移动。
17.进一步的,所述连接板还设置有第一连接块、第二连接块与凸起块,所述第一连接块的一端设置有凹槽,所述第二连接块与所述第一连接块螺栓连接,所述第一连接块通过所述第二连接块将所述连接板的端部固定在所述凹槽内。所述凸起块设置在所述第一连接块的一侧,所述固定板的侧边与所述第一连接块的侧边连接,所述固定板的侧边端部位于所述凸起块上,所述第一连接块与所述凸起块均与所述固定板螺栓连接。提高了所述固定板与所述连接板之间连接程度,延长了所述固定板与所述连接板的使用寿命。
18.本实用新型所述的全自动垛机中,所述全自动垛机还包括输送架,所述输送架设置有导向杆,所述导向杆的两侧设置有导向槽。所述安装架的顶部设置有滚轮,多个所述滚轮位于所述导向杆的两侧,且所述滚轮位于所述导向槽内,便于所述z轴运动机构驱动所述安装架沿输送线路运动。
19.本实用新型由于采用了上述的全自动垛机,相较于现有技术,其有益效果为:本实用新型涉及一种全自动垛机,该全自动垛机包括安装架、放料装置以及xyz轴运动装置。放料装置包括底板、支撑机构与放料平台,底板放置在安装架上,放料平台通过支撑机构架设在所述底板上。x轴运动机构与z轴运动机构设置在安装架的一端,x轴运动机构用于驱动所述放料装置沿输送方向移动。y轴运动机构设置在底板上,z轴运动机构驱动y轴运动机构以
及放料装置沿安装架进行升降运动,y轴运动机构驱动支撑机构与放料平台移出进料口取料,然后再反转y轴运动机构使得支撑机构、放料平台与放料平台上的测试板以及对应的主机一起回复初始位置,完成全自动化作业,大大降低了人工成本,解决了现有技术中堆放输送线需人工进行中间转运导致成本较高的问题。
附图说明
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面对实施例中所需要使用的附图作简单的介绍,下面描述中的附图仅为本实用新型的部分实施例相应的附图。
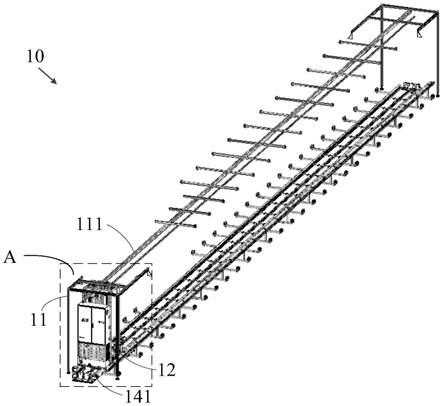
21.图1为本实用新型的全自动垛机的一实施例的结构示意图。
22.图2为本实用新型的全自动垛机的a结构的一实施例的放大示意图。
23.图3为本实用新型的全自动垛机的一实施例的侧视图。
24.图4为本实用新型的全自动垛机的支撑机构的一实施例的结构示意图。
25.图中:10.全自动垛机,11.输送架,111.导向杆,12.安装架,121.滚轮,122.进料口,13.放料装置,131.底板,132.支架,133.支撑机构,1331.第一支撑座,13311.第一减重孔,1332.中转支撑座,13321.第二卡槽,13322.第二减重孔,13323.加强块,1333.第二支撑座,13331.第一卡槽,134.放料平台,135.限位块,136.连接板,1361.第一连接块,1362.第二连接块,1363.凸起块,1364.限位槽,14.xyz轴运动装置,141.x轴运动机构,142.y轴运动机构,143.z轴运动机构,1431.z轴驱动电机,1432.z轴丝杆,1433.固定块,1434.固定板。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.本实用新型中所提到的方向用语,例如「上」、「下」、「前」、「后」、「左」、「右」、「内」、「外」、「侧面」、「顶部」以及「底部」等词,仅是参考附图的方位,使用的方向用语是用以说明及理解本实用新型,而非用以限制本实用新型。
28.在图中,结构相似的单元是以相同标号表示。
29.请参照图1、图2,在本实施例中,该全自动垛机10包括输送架11、安装架12、放料装置13以及xyz轴运动装置14。该输送架11设置有导向杆111,导向杆111的两侧设置有导向槽。对应的,安装架12的顶部设置有滚轮121,多个滚轮121位于导向杆111的两侧,且滚轮121位于导向槽内,便于z轴运动机构143驱动安装架12沿输送线路运动,在本实用新型中每侧设置了两个滚轮121。安装架12的两侧设置有进料口122,方便放料装置13取料或者放料。
30.在本实施例中,请参照图3,xyz运动装置包括x轴运动机构141、y轴运动机构142与z轴运动机构143。x轴运动机构141设置在安装架12的一端,用于驱动放料装置13沿输送方向移动。y轴运动机构142设置在底板131上,y轴运动机构142与支撑机构133连接,y轴运动机构142驱动支撑机构133与放料平台134移出进料口122取料。两个z轴运动机构143分别设置在安装架12的两侧,z轴运动机构143驱动y轴运动机构142以及放料装置13沿安装架12进
行升降运动。z轴运动机构143包括z轴驱动电机1431、z轴丝杆1432、固定块1433以及固定板1434。z轴驱动电机1431设置在安装架12上,z轴丝杆1432与z轴驱动电机1431传动连接,z轴丝杆1432靠近底板131的一端通过固定块1433与安装架12的一侧连接,固定板1434与固定块1433通过螺栓连接。固定板1434的两端分别与安装架12滑动连接。
31.在本实用新型中,请参照图4,放料装置13包括底板131、支架132、支撑机构133、放料平台134、限位块135以及连接板136。两个连接板136分别放置在安装架12的两侧,连接板136的两端均设置有第一连接块1361、第二连接块1362与凸起块1363。第一连接块1361的一端设置有凹槽,将连接杆的端部放置在凹槽内,第二连接块1362封盖在凹槽上,第二连接块1362与第一连接块1361螺栓连接,第一连接块1361通过第二连接块1362将连接板136的端部固定在凹槽内。凸起块1363设置在第一连接块1361的一侧,固定板1434的侧边与第一连接块1361的侧边连接,固定板1434的底边放在凸起块1363上,第一连接块1361与凸起块1363均与固定板1434螺栓连接。从两个方位将连接板136与固定板1434连接,提高了固定板1434与连接板136之间连接程度,延长了固定板1434与连接板136的使用寿命。两侧的z轴运动机构143共同抬升连接板136来抬升放料装置13,使放料装置13能平稳升降,避免放料平台134发生倾斜。连接板136的一侧还设置有限位槽1364,底板131放置在限位槽1364内,限定了底板131的位置,避免升降过程中底板131在连接板136上随意移动。
32.在本实施例中,支撑机构133包括第一支撑座1331、中转支撑座1332以及第二支撑座1333。第一支撑座1331、中转支撑座1332、第二支撑座1333的宽度依次增加,可以提高搭接的紧密程度,确保中转支撑座1332、第二支撑座1333相继支伸出去后有足够的承载力。第一支撑座1331、中转支撑座1332、第二支撑座1333的厚度依次减小,第一支撑座1331主要用于根据现场情况调整高度,起过渡作用,尺寸小也可以减少成本。中转支撑座1332与第二支撑座1333之间搭接稳固,同时也可通过第一支撑座1331的厚度提高放料平台134的高度。底板131的两端分别设置有支架132,第一支撑机构133的两端分别位于两个支架132上,y轴运动机构142的输出轴与第一支撑座1331连接。第一支撑座1331的两侧分别设置有第一减重孔13311,第一支撑座1331下端的第一减重孔13311的高度大于其上端第一减重孔13311的高度,这样可以确保上面结构连接的更加牢固。
33.其中,中转支撑座1332设置有第二卡槽13321与第二减重孔13322,第二卡槽13321与第二减重孔13322分别设置在中转支撑座1332的两侧。第二卡槽13321与第二减重孔13322之间设置有加强块13323,加强块13323的一侧与第一支撑座1331的一端连接。中转支撑座1332通过第二卡槽13321与第一支撑座1331的一端卡设连接,中转支撑座1332设置有第二减重孔13322的一侧设置在第二支撑座1333的第一卡槽13331内,提高了连接的紧固效果,第二减重孔13322减轻了中转支撑座1332的重量,也节约了成本。第二支撑座1333的上端放置有放料平台134,放料平台134的两端设置有限位块135,限位块135与测试板的端部紧贴,防止测试板在移动过程中与放料平台134错位。
34.本实用新型的工作原理如下步骤所示:
35.启动电源,x轴运动机构141驱动安装架12及其内部的放料装置13沿着输送架11的输送线路移动到设定的取料点,安装架12两侧的z轴运动机构143带动y轴运动机构142以及放料装置13沿安装架12进行升降运动。具体的,z轴驱动电机1431驱动z轴丝杆1432转动,两侧的z轴丝杆1432均通过固定块1433以及固定板1434带动连接板136的两端共同上移,连接
板136上放置的放料装置13以及y轴运动机构142一起上移。当移动到指定高度后,z轴驱动电机1431停止工作,y轴运动机构142开始工作。y轴运动机构142驱动中转支撑座1332在第一支撑座1331内往出料口滑动,第一支撑座1331给中转支撑座1332提供支撑。当中转支撑座1332支伸到设定位置,中转支撑座1332停止滑动。此时,第二支撑座1333带动放料平台134从中转支撑座1332内滑出,使放料平台134位于测试板的下方。启动z轴驱动电机1431,放料平台134上移,使测试板与放料平台134接触并两个限位块135之间,继续提升,直到测试板脱离原先的放置位置。然后驱动y轴运动机构142将第二支撑座1333与中转支撑座1332逐一恢复到初始位置。z轴驱动电机1431驱动z轴丝杆1432带动连接板136下移,使连接板136回到安装架12的底部。接着,x轴运动机构141驱动安装架12将测试板上的主机输送到检测设备处,并将主机送至检测设备上。送料的过程与上述取料的过程以及原理相同或相似,具体请参照上述的取料步骤。
36.本实用新型涉及一种全自动垛机,该全自动垛机包括安装架、放料装置以及xyz轴运动装置。放料装置包括底板、支撑机构与放料平台,底板放置在安装架上,放料平台通过支撑机构架设在所述底板上。x轴运动机构与z轴运动机构设置在安装架的一端,x轴运动机构用于驱动所述放料装置沿输送方向移动。y轴运动机构设置在底板上,z轴运动机构驱动y轴运动机构以及放料装置沿安装架进行升降运动,y轴运动机构驱动支撑机构与放料平台移出进料口取料,然后再反转y轴运动机构使得支撑机构、放料平台与放料平台上的测试板以及对应的主机一起回复初始位置,完成全自动化作业,大大降低了人工成本,解决了现有技术中堆放输送线需人工进行中间转运导致成本较高的问题。
37.综上,虽然本实用新型已以优选实施例揭露如上,但上述优选实施例并非用以限制本实用新型,本领域的普通技术人员,在不脱离本实用新型的精神和范围内,均可作各种更动与润饰,因此本实用新型的保护范围以权利要求界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1