PCB收放板机的制作方法
pcb收放板机
技术领域
1.本实用新型涉及pcb板生产技术领域,尤其涉及一种pcb收放板机。
背景技术:
2.pcb制造工艺中,根据每一步的工艺不同,pcb板需要由一个装置运送至另一个装置。在此过程中,通常需要用到收板机和放板机。收板机的作用是把前一装置上依次输送出来的一片一片的pcb板整齐的收集在一起,以便于将pcb板转运至其他装置中。放板机的作用是把转运的pcb板一片一片地放置于机台上。而收板机和放板机的结构大致相同,故收板机的动作通常与放板机的动作相反。目前,现有的pcb收放板机在使用过程中存在工作效率低、自动化程度低,传输不平稳,且收放板效果差的问题,同时需要花费大量人力劳动。
技术实现要素:
3.本实用新型的目的在于提供一种工作效率高、收放板效果好的pcb收放板机。
4.为实现上述目的,本实用新型提供了一种pcb收放板机,包括机架、上下料机构、输送机构及搬运手臂机构,所述上下料机构设置于所述机架上,所述上下料机构用于对pcb板进行供料或下料,所述输送机构设置于所述机架上并位于所述上下料机构的一侧,所述输送机构用于输送所述pcb板;所述搬运手臂机构设置于所述机架上并位于所述输送机构的上方,所述搬运手臂机构用于将所述上下料机构上的pcb板搬运至所述输送机构上或者将所述输送机构上的pcb板搬运至所述上下料机构上,所述搬运手臂机构包括摆动搬运模组、升降搬运模组及吸附模组,所述摆动搬运模组与所述升降搬运模组连接,所述升降搬运模组与所述吸附模组连接,借由所述摆动搬运模组驱动所述吸附模组摆动、所述升降搬运模组驱动所述吸附模组升降,以使所述吸附模组吸附和搬运所述pcb板。
5.较佳地,所述上下料机构包括升降上下料驱动机构、底托及料架,所述升降上下料驱动机构设置于所述机架上,所述升降上下料驱动机构与所述底托连接,所述料架位于所述底托上,所述料架用于储放所述pcb板;借由所述上下料驱动机构驱动所述底托连同所述料架一起升降,以进行供料或下料。
6.较佳地,所述底托上设有若干个滚珠部,所述料架承载于所述滚珠部上。
7.较佳地,所述底托上设有位于所述料架后侧的后挡机构;借由所述后挡机构阻挡所述料架的后端,以对所述料架进行限位;借由所述后挡机构释放所述料架,以便于搬运所述料架。
8.较佳地,所述pcb收放板机还包括agv小车,借由所述agv小车移动至所述底托的下方,使得所述agv小车将所述料架从所述底托上运走,或者使得所述agv小车将所述料架放置于所述底托上。
9.较佳地,所述搬运手臂机构还包括直线移动模组,所述直线移动模组设置于所述机架上,所述摆动搬运模组设置于所述直线移动模组上,所述机架上沿所述直线移动模组的移动方向设有若干个所述上下料机构。
10.较佳地,所述摆动搬运模组包括第一旋转驱动组件及摆动臂,所述第一旋转驱动组件设置于所述直线移动模组上,所述第一旋转驱动组件与所述摆动臂连接,所述第一旋转驱动组件用于驱动所述摆动臂摆动,所述升降搬运模组安装于所述摆动臂内。
11.较佳地,所述升降搬运模组包括第二旋转驱动组件、滚珠丝杆组件、连接件及升降柱,所述第二旋转驱动组件设置于所述摆动臂内,所述第二旋转驱动组件与所述滚珠丝杆组件的丝杆部连接,所述第二旋转驱动组件用于驱动所述丝杆部转动,所述滚珠丝杆组件的螺母部与所述连接件连接,所述连接件与所述升降柱连接,所述升降柱可移动地穿设于所述摆动臂上,所述升降柱与所述吸附模组连接。
12.较佳地,所述机架上设有位于所述输送机构一侧的ng板工位,所述ng板工位用于放置不合格的pcb板。
13.较佳地,所述pcb收放板机还包括对位机构,所述对位机构包括对位驱动机构及对位件,所述对位驱动机构设置于所述机架上,所述对位驱动机构的输出端与所述对位件连接,所述对位件位于所述输送机构的下方,借由所述对位驱动机构驱动所述对位件上升并凸伸出所述输送机构的上方,以使所述输送机构输送所述pcb板对位至所述对位件。
14.与现有技术相比,本实用新型的pcb收放板机通过将输送机构设置于上下料机构的一侧,利用搬运手臂机构的摆动搬运模组驱动所述吸附模组摆动于输送机构与上下料机构之间,以及利用升降搬运模组驱动所述吸附模组升降,使得吸附模组可快速吸附所述pcb板,以将pcb板从上下料机构快速搬运至输送机构,或者,将pcb板从输送机构快速搬运至上下料机构上,因此,本实用新型的pcb收放板机工作效率高、收放板效果好。
附图说明
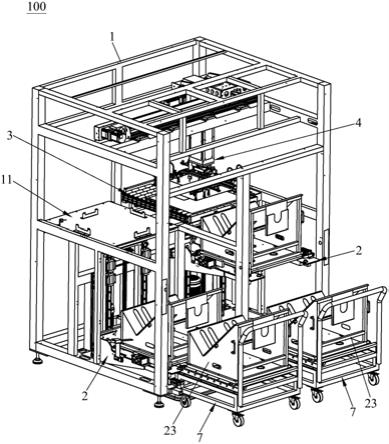
15.图1是本实用新型的pcb收放板机的立体结构示意图。
16.图2是本实用新型的pcb收放板机去掉部分结构后的结构示意图。
17.图3是本实用新型的上下料机构的结构示意图。
18.图4是本实用新型的料架与载具的结构示意图。
19.图5是本实用新型的搬运手臂机构的结构示意图。
20.图6是本实用新型的搬运手臂机构去掉部分结构后的结构示意图。
21.图7是本实用新型的输送机构与对位机构的结构示意图。
具体实施方式
22.为了详细说明本实用新型的技术内容、构造特征,以下结合实施方式并配合附图作进一步说明。
23.请参阅图1、图2、图5及图6,本实用新型的pcb收放板机100包括机架1、上下料机构2、输送机构3及搬运手臂机构4,上下料机构2设置于机架1上,上下料机构2用于对pcb板进行供料或下料,输送机构3设置于机架1上并位于上下料机构2的一侧,输送机构3用于输送pcb板;搬运手臂机构4设置于机架1上并位于输送机构3的上方,搬运手臂机构4用于将上下料机构2上的pcb板搬运至输送机构3上或者将输送机构3上的pcb板搬运至上下料机构2上,搬运手臂机构4包括摆动搬运模组41、升降搬运模组42及吸附模组43,摆动搬运模组41与升降搬运模组42连接,升降搬运模组42与吸附模组43连接,借由摆动搬运模组41驱动吸附模
组43摆动、升降搬运模组42驱动吸附模组43升降,以使吸附模组43吸附和搬运pcb板。在本实施例中,输送机构3采用滚轮输送模组,但不以此为限,输送机构3也可采用现有的皮带输送模组。
24.请参阅图2至图4,在本实施例中,上下料机构2包括升降上下料驱动机构21、底托22及料架23,升降上下料驱动机构21设置于机架1上,升降上下料驱动机构21与底托22连接,料架23位于底托22上,料架23用于储放pcb板;借由上下料驱动机构驱动底托22连同料架23一起升降,以进行供料或下料。升降上下料驱动机构21可采用电机与丝杆组件配合的结构来驱动底托22升降,但不以此为限,举例而言,升降上下料驱动机构21也可采用现有的伸缩气缸。进一步地,上下料机构2还包括载具24,载具24位于底托22上,载具24上设有用于容置料架23的容置槽,料架23设置于容置槽内。在需要供料时,上下料驱动机构驱动底托22连同载具24和料架23一起上升,料架23上升到位后,搬运手臂机构4将料架23上的pcb板逐一搬运至输送机构3上。在需要下料时,搬运手臂机构4将输送机构3上的pcb板搬运至料架23上,当料架23存放满pcb板后,上下料驱动机构驱动底托22连同载具24和料架23一起下架,以对pcb板进行下料。
25.请继续参阅图2至图4,底托22上设有位于载具24左右两侧的夹紧定位机构221,夹紧定位机构221用于对载具24进行夹紧定位,但不以此为限,在其他实施例中,夹紧定位机构221也可直接对料架23进行夹紧定位。具体地,夹紧定位机构221包括夹紧气缸221a及夹紧件221b,夹紧气缸221a的输出端与夹紧件221b连接,通过左右两侧的夹紧定位机构221的夹紧气缸221a驱动夹紧件221b向内夹紧载具24,从而对载具24进行夹紧和定位,保证载具24在升降的过程中不发生偏移现象。但夹紧定位机构221的结构不以此为限,举例而言,夹紧定位机构221也可采用直线电机驱动夹紧件221b。进一步地,底托22上设有若干个滚珠部222,载具24和料架23承载于滚珠部222上。通过设置滚珠部222,可将载具24与底托22之间的滑动摩擦变为滚动摩擦,降低载具24与底托22之间的摩擦力,方便夹紧定位机构221夹紧调节载具24的位置。在其他不设置载具24的实施例中,可将料架23直接承载于滚珠部222上。更进一步地,底托22上设有位于料架23和载具24前端的前挡板223。底托22上设有位于料架23和载具24后侧的后挡机构224;借由后挡机构224阻挡载具24或料架23的后端,以对载具24或料架23进行限位;借由后挡机构224释放载具24,以便于搬运载具24和料架23。前挡板223用于对载具24的前方进行限位和对位,在载具24和料架23被运送至底托22后,前挡板223阻挡载具24的前端,再通过后挡机构224阻挡载具24的后端,以对载具24进行限位,进一步保证载具24和料架23上升降过程中不发生偏移。当然,在其他实施例中,后挡机构224也可同时阻挡载具24和料架23的后端。在需要搬运载具24和料架23时,后挡机构224释放载具24,从而可从载具24的后侧将载具24和料架23搬运走。具体地,后挡机构224包括后挡旋转驱动机构224a及后挡件224b,旋转驱动机构的输出端与后挡件224b连接,旋转驱动机构通过驱动后挡件224b旋转,使得后挡件224b阻挡或释放载具24。
26.请参阅图5及图6,搬运手臂机构4还包括直线移动模组44,直线移动模组44设置于机架1上,摆动搬运模组41设置于直线移动模组44上,机架1上沿直线移动模组44的移动方向设有若干个上下料机构2。直线移动模组44可快速驱动摆动搬运模组41连同升降搬运模组42和吸附模组43一起移动至与其中一个上下料机构2对位的位置处,从而可快速地将pcb板快速地从该上下料机构2的料架23上取走,或者可快速地将pcb板快速地放置于该上下料
机构2的料架23上。在本实施例中,上下料机构2有两个,但不以此为限,上下料机构2的数量也可为一个或三个等等。具体地,摆动搬运模组41包括第一旋转驱动组件411及摆动臂412,第一旋转驱动组件411设置于直线移动模组44上,第一旋转驱动组件411与摆动臂412连接,第一旋转驱动组件411用于驱动摆动臂412摆动,升降搬运模组42安装于摆动臂412内。更具体地,升降搬运模组42包括第二旋转驱动组件421、滚珠丝杆组件422、连接件423及升降柱424,第二旋转驱动组件421设置于摆动臂412内,第二旋转驱动组件421与滚珠丝杆组件422的丝杆部连接,第二旋转驱动组件421用于驱动丝杆部转动,滚珠丝杆组件422的螺母部与连接件423连接,连接件423与升降柱424连接,升降柱424可移动地穿设于摆动臂412上,升降柱424与吸附模组43连接。第二旋转驱动组件421驱动滚珠丝杆组件422的丝杆部转动,使得滚珠丝杆组件422的丝杆部带动螺母部移动升降,从而使得螺母部带动升降柱424移动升降,升降柱424移动升降,从而带动吸附模组43移动升降,使得吸附模组43将pcb板吸附和取走。其中,第一旋转驱动组件411和第二旋转驱动组件421均可采用现有的旋转电机与同步带轮组配合连接的方式来进行驱动,但不以此为限,也可直接采用减速电机。吸附模组43和直线移动模组44的具体结构和原理为本领域技术人员所熟知,故在此不赘述。
27.请参阅图1及图2,pcb收放板机100还包括agv小车5,借由agv小车5移动至底托22的下方,使得agv小车5将料架23从底托22上运走,或者使得agv小车5将料架23放置于底托22上。具体地,agv小车5将载具24连同料架23从底托22上运走,或者使得agv小车5将载具24连同料架23放置于底托22上。在收板工序完成后,通过升降上下料驱动机构21驱动底托22连同载具24和料架23一起下降至下方工位,通过agv小车5移动至底托22的下方,使得agv小车5将载具24连同料架23从底托22顶起和运走,从而实现自动化下料。在需要放板时,通过agv小车5将载具24连同料架23搬运至位于下方工位的底托22上,从而实现自动化供料,通过升降上下料驱动机构21驱动底托22连同载具24和料架23一起上升至上方工位,使得搬运手臂机构4将料架23的pcb板逐一搬运至输送机构3上。但不以此为限,在其他实施例中,pcb收放板机100还可包括推车7,推车7可装载载具24和料架23,可通过将推车7推动至与上下料机构2对应的位置,再通过将载具24连同料架23一起推动至上下料机构2的底托22上,以实现供料;在需要下料时,可通过将推车7推动至与上下料机构2对应的位置,将载具24连同料架23一起拉动至推车7上,然后推动推车7移动。
28.请参阅图1,机架1上设有位于输送机构3一侧的ng板工位11,ng板工位11用于放置不合格的pcb板。在检测到pcb板为ng板时,搬运手臂机构4可将该ng的pcb板搬运至ng板工位11上,ng板工位11暂存ng板。
29.请参阅图7,pcb收放板机100还包括对位机构6,对位机构6包括对位驱动机构61及对位件62,对位驱动机构61设置于机架1上,对位驱动机构61的输出端与对位件62连接,对位件62位于输送机构3的下方,借由对位驱动机构61驱动对位件62上升并凸伸出输送机构3的上方,以使输送机构3输送pcb板对位至对位件62。对位驱动机构61可采用现有的气缸,但不以此为限。
30.结合图1至图7,本实用新型的pcb收放板机100的具体原理如下:
31.在需要收板时,输送机构3输送pcb板先前进,在越过对位机构6对位的位置后,对位驱动机构61驱动对位件62上升并凸伸出输送机构3的上方,输送机构3输送pcb板后退并对位至对位件62上,搬运手臂机构4的直线移动模组44驱动吸附模组43移动至输送机构3上
的pcb板的上方,升降搬运模组42驱动吸附模组43升降,使得吸附模组43吸附并取走位于输送机构3上的pcb板,利用摆动搬运模组41驱动吸附模组43连同pcb板一起摆动至与位于上下料机构2上的料架23对应的角度,升降搬运模组42驱动吸附模组43升降,使得吸附模组43将pcb板放置于料架23上。其中,直线移动模组44也可驱动摆动搬运模组41连同升降搬运模组42和吸附模组43一起移动至与其他上下料机构2对应的位置处,从而将pcb板放置于其他上下料机构2上的料架23上。
32.在需要放板时,搬运手臂机构4的摆动搬运模组41驱动升降搬运模组42和吸附模组43一起摆动至与位于上下料机构2上的料架23对应的角度,升降搬运模组42驱动吸附模组43升降,使得吸附模组43吸附并取走位于料架23上的pcb板,然后摆动搬运模组41驱动升降搬运模组42和吸附模组43一起摆动至输送机构3的上方,升降搬运模组42驱动吸附模组43升降,使得吸附模组43将pcb板放置于输送机构3上,输送机构3将pcb板输送走。其中,直线移动模组44也可驱动摆动搬运模组41连同升降搬运模组42和吸附模组43一起移动至与其他上下料机构2对应的位置处,从而取走位于其他上下料机构2上的料架23的pcb板。
33.综上,本实用新型的pcb收放板机100通过将输送机构3设置于上下料机构2的一侧,利用搬运手臂机构4的摆动搬运模组41驱动吸附模组43摆动于输送机构3与上下料机构2之间,以及利用升降搬运模组42驱动吸附模组43升降,使得吸附模组43可快速吸附pcb板,以将pcb板从上下料机构2快速搬运至输送机构3,或者,将pcb板从输送机构3快速搬运至上下料机构2上,因此,本实用新型的pcb收放板机100工作效率高、收放板效果好。
34.以上所揭露的仅为本实用新型的较佳实例而已,不能以此来限定本实用新型之权利范围,因此依本实用新型权利要求所作的等同变化,均属于本实用新型所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1