一种带有上料机构的运输机器人
1.本实用新型涉及物流配送技术领域,更具体地说涉及一种带有上料机构的运输机器人。
背景技术:
2.物流指的是物品从供应地向接收地的实体流动中,根据实际需要将运输、存储、装卸、搬运、包装、流通加工、配送和信息处理等功能有机结合起来,以实现用户要求的过程。区域物流是物流在空间范围分类中的一个概念,与之相对应的是国内物流和国际物流。
3.现有的物流配送中使用的运输机器人通常焊接在固定的上料装置上,使得运输机器人无法进行移动,增大了物件上料的局限性,且现有运输机器人无法调节自身的高度,降低物件上料的效率。
4.有鉴于此,本发明人在此基础上进行深入研究,遂有本案的产生。
技术实现要素:
5.本实用新型的目的是提供一种带有上料机构的运输机器人,其能够横向滑动和上下升降,并使两机械夹手相向移动以对物件进行夹取,提高了上料效率。
6.为达到上述目的,本实用新型的解决方案是:
7.一种带有上料机构的运输机器人,包括架体、上料机构、两机械夹手、用于带动所述架体移动的多个滚动机构及用于对所述上料机构、两所述机械夹手和所述滚动机构进行控制的控制机构;所述滚动机构安装于所述架体上,所述架体上安装有横向滑动的滑动框架,所述上料机构包括滑动件,所述滑动件以上下滑动的方式安装于所述滑动框架上,两所述机械夹手分别以相背或相向滑动的方式安装于所述滑动件上;各所述滚动机构均包括滚动架、滚轮、轴杆、两齿轮盘一、两齿轮盘二、两皮带、两滚动驱动电机和用于驱动所述滚轮转动的移动电机,每个所述滚动机构中,所述轴杆以能够转动的方式安装于所述滚动架上,所述轴杆的上端转动连接于所述架体上,所述轴杆的下端连接可转动的所述滚轮,且所述轴杆从上至下套设有两所述齿轮盘一,两所述滚动驱动电机分别安装于所述滚动架上,且两所述滚动驱动电机的输出轴上分别套设有所述齿轮盘二,两所述齿轮盘一和两所述齿轮盘分别一对一配设,两所述皮带分别绕设于相互配设的所述齿轮盘一和所述齿轮盘二之间。
8.所述上料机构包括安装于所述滑动框架上的固定座及连接于所述滑动件的下端的固定板,所述滑动件通过所述固定座以能够上下滑动的方式安装于所述滑动框架上,两所述机械夹手分别以相背或相向滑动的方式安装于所述固定板上,所述控制机构安装于所述固定板上。
9.所述上料机构包括安装于所述滑动框架上的固定座,以能够上下滑动的方式安装于所述固定座上的滑动件及连接于所述滑动件的下端的固定板,两所述机械夹手分别以相背或相向滑动的方式安装于所述固定板上,所述控制机构安装于所述固定板上。
10.所述滑动框架通过横向滑动装置进行横向滑动,所述横向滑动装置包括两滑轨、两滑块和两伸缩杆一,两所述滑轨分别设置于所述架体的上侧面,并分设于所述滑动框架的两侧,所述滑动框架对应于两所述滑轨的位置分别设置有所述滑块;两所述伸缩杆一分别安装于所述架体上,且两所述伸缩杆一的伸缩端分别连接所述滑动框架。
11.两所述伸缩杆一分别通过驱动源驱动,或者两所述伸缩杆一共用驱动源驱动;其中,所述驱动源均为液压、气压或电动,且所述驱动源的驱动端电性连接所述控制机构的信号输出端。
12.所述滑动件通过上下滑动装置上下滑动,所述上下滑动装置包括上下驱动电机及相互啮合的主动齿轮和齿条,所述齿条上下布置,且所述齿条装设于所述滑动件上,所述上下驱动电机架设于所述固定座上,所述主动齿轮套设于所述上下驱动电机的输出轴上;所述上下驱动电机的驱动端电性连接所述控制机构的信号输出端。
13.所述滑动件为呈方形状的滑动柱或滑动杆。
14.两所述机械夹手共同通过机械驱动装置进行相向运动或相背运动;所述机械驱动装置包括两滑动座和具有双轴的伸缩杆二,两所述滑动座分别滑动安装于所述固定板上,所述伸缩杆二位于两所述滑动座上,且所述伸缩杆二的两伸缩端分别连接对应的所述滑动座,两所述滑动座分别连接所述机械夹手。
15.所述伸缩杆二通过驱动源驱动,所述驱动源为气压、液压或电动,且所述驱动源的驱动端电性连接所述控制机构的信号输出端。
16.各所述滚轮的外侧分别套设有防滑套。
17.所述控制机构包括单片机和定位器,所述固定座上安装有pcb板,所述单片机和所述定位器均集成于所述pcb板上,所述定位器的信号输出端电性连接所述单片机的信号输入端。
18.采用上述结构后,本实用新型具有如下有益效果:
19.1、本实用新型通过滚动机构驱动架体自由移动,从而使两机械夹手自由移动,并通过滑动件的上下滑动带动两机械夹手向上或向下移动,以调节两机械夹手的高度,然后两机械夹手相向移动以对物件进行夹取,从而实现对不同高度的物件进行夹取,降低了物件上料的局限性,提高了上料效率。
20.2、采用定位器的定位,以对移动的架体进行定位,便于对不同位置的物件进行上料操作,且定位器将检测的位置传输给单片机,以方便操作人员追踪和查看,提升了上料的移动范围。
附图说明
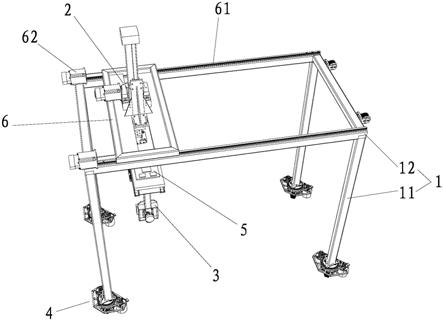
21.图1为本实用新型运输机器人的结构示意图;
22.图2为本实用新型中上料机构的结构示意图;
23.图3为本实用新型中两机械夹手的结构示意图;
24.图4为本实用新型中滚动机构的结构示意图。
25.图中:
[0026]1‑
架体;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
‑
撑脚;
[0027]
12
‑
方形框;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑
上料机构;
[0028]
21
‑
固定座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22
‑
滑动件;
[0029]
221
‑
上下驱动电机;
ꢀꢀꢀ
222
‑
主动齿轮;
[0030]
223
‑
齿条;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23
‑
固定板;
[0031]3‑
机械夹手;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31
‑
滑动座;
[0032]
32
‑
伸缩杆二;
ꢀꢀꢀꢀꢀꢀꢀꢀ4‑
滚动机构;
[0033]
41
‑
滚轮;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42
‑
齿轮盘一;
[0034]
43
‑
齿轮盘二;
ꢀꢀꢀꢀꢀꢀꢀꢀ
44
‑
皮带;
[0035]
45
‑
滚动驱动电机;
ꢀꢀꢀꢀ
46
‑
滚动架;
[0036]5‑
控制机构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ6‑
滑动框架;
[0037]
61
‑
滑轨;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
62
‑
伸缩杆一。
具体实施方式
[0038]
为了进一步解释本实用新型的技术方案,下面通过具体实施例来对本实用新型进行详细阐述。
[0039]
一种带有上料机构的运输机器人,如图1
‑
4所示,包括架体1、上料机构2、两机械夹手3、控制机构5和多个滚动机构4。为方便描述,以架体1的长度方向为横向,水平垂直于横向的方向为纵向。架体1上安装有横向滑动的滑动框架6,上料机构安装于滑动框架6上,通过滑动框架6的横向滑动以带动上料机构2横向滑动,两机械夹手3以相背或相向滑动的方式安装在上料机构2,本实施例中两机械夹手3均沿纵向滑动,控制机构5安装于上料机构2上,各滚动机构4共同作用于架体1,以带动架体1自由移动。
[0040]
在本实施例中,架体1包括四根撑脚11和方形框12,四根撑脚11均上下布置,且四根撑脚11的上端分别固定连接于方形框12的拐角位置,四根撑脚11的下端分别固定连接有上述的滚动机构,即本实施例的滚动机构4有四个。需说明的是,架体1的形状和大小可根据实际情况进行设置,并不局限于上述样式,并且滚动机构的数量也可以根据实际情况,结合架体1的形状进行设置。
[0041]
如图1所示和如图4所示,各滚动机构4的结构相同,故以其中一个滚动机构4为例进行说明。滚动机构4包括滚动架46、滚轮41、轴杆、两齿轮盘一42、两齿轮盘二43、两皮带44、两滚动驱动电机45和用于驱动滚轮41转动的移动电机;轴杆以能够转动的方式安装于滚动架46上,轴杆的安装结构为现有常规结构,如在滚动架46上安装有轴承,轴杆穿插于轴承中;轴杆的上端以能够转动的方式连接于相应撑脚11的下端,如两者采用键联接,轴杆的下端按常规方式连接可转动的滚轮41,如轴杆的下端固定连接有安装耳座,安装耳座呈n字型,滚轮位于安装耳座中,且安装耳座的两相对侧壁和滚轮分别开设有相互对应的插孔,滚轮通过插杆与三个插孔的配合可转动的安装在安装耳座上;其中,移动电机安装于安装耳座的一侧壁,移动电机的输出轴传动连接插杆的一端。两齿轮盘一42均固定套设于轴杆上,并位于滚动架46的上侧,两齿轮盘一42从上至下依次布置;两滚动驱动电机45分别安装于滚动架46上,并分设于滚轮41的两侧,且两滚动驱动电机45均位于滚动架46的下侧,两滚动驱动电机45的输出轴分别伸出于滚动架46的上侧面,两齿轮盘二43分别固定套设于滚动驱动电机45的输出轴上,两齿轮盘一42和两齿轮盘二43分别一对一配设,即两齿轮盘一42分别与对应的齿轮盘二43共同形成齿轮组件,两齿轮盘一42的外直径均大于两齿轮盘二43的
外直径,两皮带44分别绕设对应的齿轮组件之间。较佳地,为防滑,滚轮41外套设有防滑套。
[0042]
这样,移动电机的工作,使移动电机的输出轴带动插杆转动,从而使滚轮41转动,以实现架体1的前进或后退。在调节架体1移动角度时,两滚动驱动电机45同步开始工作,两滚动驱动电机45的输出轴转动,分别带动对应的齿轮盘二43转动,两齿轮盘二43转动分别通过皮带44带动对应的齿轮盘一42转动,以使轴杆转动,以对滚轮41相对于水平面的位置关系进行调节,即调节滚轮41的方向,从而实现架体自由移动。
[0043]
如图1
‑
2所示,上述的滑动框架6为方形框架,滑动框架6沿纵向布置,滑动框架6通过横向滑动装置进行横向滑动。横向滑动装置包括两滑轨61、两滑块和两伸缩杆一62,两滑轨61分别铺设于方形框12的上侧面,并分设于滑动框架6的两侧,且两滑轨61依次沿纵向布置,滑动框架6对应于两滑轨61的位置分别设置滑块,两滑轨61分别与对应的滑块滑动配合,两伸缩杆一62分别安装于方形框12上,并分设于方形框12的拐角位置,两伸缩杆一62的伸缩端均固定连接滑动框架6。其中,两伸缩杆一62分别通过驱动源驱动,两驱动源均为液压、气压或电动,在驱动源为电动时两伸缩杆一62均为电动伸缩杆,若驱动源为液压或气压,则伸缩杆一62为气缸的活塞杆。在本实施例中,此驱动源为电动。此外,两伸缩杆一62还可以共用一个驱动源。
[0044]
这样,两伸缩杆一62的伸长或收缩,推动滑动框架6沿横向移动,从而使上料机构2和两机械夹手3也沿横向移动。
[0045]
如图2
‑
3所示,上述的上料机构2包括固定座21、滑动件22和固定板23,固定座21固定安装于上述的滑动框架6上,滑动件22上下布置,且滑动件22以能够上下滑动的方式安装于固定座21上,且滑动件22的两端分别伸出于滑动框架6的上侧和下侧,固定板23固定连接于滑动件22的下端。其中,滑动件22的滑动结构为现有常规结构,如,固定座21上开设有安装通道,此安装通道开设有滑槽,滑动件22对应于滑槽的位置开设有滑动块,滑动件22通过滑槽与滑动块的滑动配合而滑动安装在固定座21上。
[0046]
进一步说,滑动件22为呈方形状的滑动柱或滑动杆,此滑动件22通过上下滑动装置进行上下滑动。上下滑动装置包括上下驱动电机221及相互啮合的主动齿轮222和齿条223,上下驱动电机221安装在固定座21上,固定座21上安装有轴承,此轴承中穿插有转轴,上下驱动电机的输出轴与转轴传动连接,如两者采用联轴器连接,主动齿轮222套设于转轴上,齿条223铺设于滑动件22上,且主动齿轮222与齿条223相互啮合。此外,主动齿轮222还可以直接套设于上下驱动电机221的输出轴上。
[0047]
这样,上下驱动电机221工作时,上下驱动电机221的输出轴转动,以带动主动齿轮221转动,以主动齿轮221和齿条222相互啮合,使滑动件22向上或向下滑动,从而带动固定板23向上或向下滑动。
[0048]
如图3所示,上述的两机械夹手3均固定连接于固定板23上,两机械夹手3共同通过机械驱动装置进行相向或相背运动。机械驱动装置包括两滑动座31和具有双轴的伸缩杆二32,两滑动座31依次沿纵向布置,且两滑动座31分别滑动安装于固定板23上,两滑动座31的滑动结构均与上述的滑动件22的滑动结构相同,故不再展开叙述。伸缩杆二32位于两滑动座31之间,且伸缩杆二32的两伸缩端分别固定连接于对应的滑动座31上,以通过伸缩杆二32的两伸缩端的伸缩使两机械夹手3相向或相背运动。其中,伸缩杆二32也是通过驱动源驱动,此驱动源与伸缩杆一62中使用的驱动源相同。
[0049]
本实施例中,两机械夹手3均为常规的机械臂,两机械夹手3相对布置,并共同作用以夹取物件。
[0050]
上述的控制机构5包括单片机,移动电机和滚动驱动电机的驱动端分别电连接单片机的信号输出端,以通过单片机对移动电机和滚动驱动电机进行控制。两伸缩杆一的驱动端(即电动伸缩杆一的驱动端)分别电连接单片机的信号输出端,以通过单片机控制伸缩杆一62的伸长或回缩。上下驱动电机的驱动端电连接单片机的信号输出端,以通过单片机对上下驱动电机进行控制,以使滑动件22向上或向下滑动。伸缩杆二32的驱动端电连接单片机的信号输出端,以通过单片机对伸缩杆二32的两伸缩端的伸缩进行控制。
[0051]
进一步说,控制机构5还包括定位器,在上料机构2的固定板23上安装pcb板,单片机集成于pcb板上,且pcb板还集成有定位器,定位器的信号输出端电连接单片机的信号输入端,定位器将采集的位置信号发送给单片机,以获取架体1的实时位置信息。其中,定位器为现有常规的gps定位器。
[0052]
作为优选方式,其中一个机械夹手3上安装有摄像头,此摄像头向下布置,摄像头的信号输出端电连接单片机的信号输入端。这样,摄像头采集的图像信息传输给单片机,单片机对图像信息进行常规处理,以获取物件的高度、大小和位置等信息。
[0053]
在本实施例中,单片机采用现有常规具有图像处理功能的单片机,例如研华科技出品的610l工控机,再如型号为stm32的单片机。
[0054]
本实用新型一种带有上料机构的运输机器人,架体1自由移动,使待抓取物件位于架体1的范围内,然后滑动框架6横向滑动,以使两机械夹手3均位于待抓取物件的上侧,然后滑动件22向下滑动,令待抓取物件位于两机械夹手3之间,随后两机械夹手3相向滑动,是两机械夹手3夹紧待抓取物件,然后滑动件22向上滑动,以实现物件上料,在物件被放置到相应位置后,两机械夹手3分别相背运动,并被滑动件22带动向上移动至合适位置。
[0055]
以上所述仅为本实施例的优选实施例,凡跟本实用新型权利要求范围所做的均等变化和修饰,均应属于本实用新型的权利要求范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1