一种塑料杯自动套标机的制作方法
1.本技术涉及塑料杯加工的技术领域,尤其是涉及一种塑料杯自动套标机。
背景技术:
2.塑料杯,指的是用来装饮料和茶的一次性容器。
3.目前,在塑料杯热塑成型后,为方便塑料杯的收纳和运输,往往需要将塑料杯一一摞在一起。
4.但是,当塑料杯的外侧需要进行套标热缩时,需要先将成摞的塑料杯一一分离,再通过套标机上的套标组件对塑料杯进行套标。而塑料杯的分离往往是由工人手动来完成的,效率低下,影响了塑料杯的加工效率,因此需要改进。
技术实现要素:
5.为了提高塑料杯的加工效率,本技术提供一种塑料杯自动套标机。
6.本技术提供的一种塑料杯自动套标机,采用如下的技术方案:一种塑料杯自动套标机,包括支架,支架上设有用于分离相邻塑料杯的分离组件、用于输送被分离的塑料杯的传送带、用于放卷包装袋的放卷组件、供包装袋滑动套设的撑料组件、用于将被撑起的包装袋切断的切割组件和用于将被切断的包装袋牵引套在传送带上的塑料杯的套袋组件;分离组件包括设于支架上的第一电机,第一电机的输出轴沿竖直方向延伸并设有位于传送带上方的套环,套环上套设有供塑料杯的杯沿搁置的套筒,套筒的外壁上设有供塑料杯的杯沿转动嵌设的螺旋槽,螺旋槽贯穿于套筒的上下两端。
7.通过采用上述技术方案,在塑料杯的上料过程中,工人将把成摞的塑料杯倒放在套筒上端,且工人将手扶上侧的塑料杯,使得塑料杯不易歪倒;第一电机将带动套环和套筒旋转,套筒在旋转过程中将使得塑料杯的杯沿进入到螺旋槽内,最下侧的塑料杯将被套筒带动下降至传送带上,而其余塑料杯将被套筒阻挡,传送带将把塑料杯向套袋组件输送。
8.在塑料杯分离的过程中,放卷组件将把包装袋放卷,撑料组件将把包装袋内部撑起,切断组件将把被撑起的包装袋切断,套袋组件将带动被切断的包装袋下降套在传送带上的塑料杯上。因此,本技术实现了塑料杯的自动分离和自动套袋,从而提高了塑料杯的加工效率。
9.可选的,所述放卷组件包括转动连接于支架的转盘,转盘上设有若干用于抵触成卷包装袋内壁的支撑杆。
10.通过采用上述技术方案,成卷的包装袋能够套紧在多根支撑杆上,保证了包装袋的稳定性;且包装袋在放卷时将带动转盘旋转,以便包装袋的放卷。
11.可选的,所述撑料组件包括呈竖直设置的立柱和若干设于支架上的限位轮,立柱的侧壁上设有若干供限位轮嵌设的嵌设槽,限位轮与嵌设槽槽壁之间设有用于供包装袋滑动穿设的穿设腔。
12.通过采用上述技术方案,当立柱将包装袋的内侧撑起后,包装带将处于穿设腔内,
限位轮将把包装带压在嵌设槽的槽壁上,限位轮实现了对立柱的支撑,保证了立柱的稳定性。
13.可选的,所述限位轮通过水平轴转动连接于支架。
14.通过采用上述技术方案,在包装袋运动的过程中,包装袋将带动限位轮绕水平轴轴线旋转,使得限位轮不易将包装袋的外侧磨损。
15.可选的,所述切割组件包括两个设于支架上的电缸,电缸的活塞杆上设有切刀,立柱的侧壁上设有供切刀嵌设的环槽。
16.通过采用上述技术方案,电缸将带动切刀将包装袋压入环槽内,从而实现了对包装袋的切断。
17.可选的,所述套袋组件包括两个设于支架上并分别位于切刀上下两侧的第二电机,第二电机的输出轴上设有用于将包装带压在立柱侧壁上的转轮。
18.通过采用上述技术方案,当两个第二电机分别带动对应的转轮旋转时,上侧第二电机和转轮将把包装袋的待切割处输送至切刀处,下侧第二电机将把被切断的包装袋输送套设在传送带上表面的塑料杯上,从而实现了对塑料杯的自动套袋。
19.可选的,还包括控制组件,控制组件包括处理器和设于支架上的红外传感器,红外传感器和两个第二电机均耦接于处理器;当红外传感器检测到塑料杯时,红外传感器将向处理器发送启动信号,处理器将先控制两个电缸进行伸缩运动,再控制两个第二电机启动指定的时间。
20.通过采用上述技术方案,当红外传感器检测到塑料杯时,红外传感器将向处理器发送启动信号,处理器将先控制两个电缸进行伸缩运动,使得切刀将包装袋切断,然后处理器再控制两个第二电机启动指定的时间,使得下侧第二电机和转轮将切断的包装袋输送套设在传送带上表面的塑料杯上,并使得上侧第二电机和转轮将包装袋的待切割处输送至切刀处,以便包装袋的下次切断。
21.可选的,所述支架上设有呈竖直设置的导料通道,导料通道供塑料杯沿竖直方向滑动穿设,位于导料通道内的塑料杯将下降搁置在套筒上端。
22.通过采用上述技术方案,成摞的塑料杯能够倒放在导料通道内,无需工人手扶塑料杯,操作方便。
附图说明
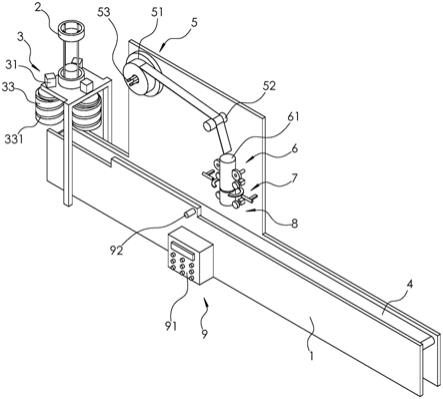
23.图1是本技术实施例中整体结构示意图;
24.图2是本技术实施例中表示分离组件的结构示意图;
25.图3是本技术实施例中表示撑料组件、切割组件和套袋组件的结构示意图。
26.附图标记:1、支架;2、导料通道;3、分离组件;31、第一电机;32、套环;33、套筒;331、螺旋槽;4、传送带;5、放卷组件;51、转盘;52、导向辊;53、支撑杆;6、撑料组件;61、立柱;611、嵌设槽;612、环槽;62、限位轮;621、水平轴;7、切割组件;71、电缸;72、切刀;8、套袋组件;81、第二电机;82、转轮;9、控制组件;91、处理器;92、红外传感器。
具体实施方式
27.以下结合附图1
‑
3对本技术作进一步详细说明。
28.本技术实施例公开一种塑料杯自动套标机。如图1所示,一种塑料杯自动套标机,包括支架1,支架1上设有导料通道2、分离组件3、传送带4、放卷组件5、撑料组件6、切割组件7和套袋组件8,导料通道2呈竖直设置并固定在支架1上。
29.在塑料杯的上料过程中,工人将把成摞的塑料杯倒放在导料通道2内,分离组件3将把成摞的塑料杯分离并使其落至传送带4上,传送带4将把塑料杯输送;在塑料杯分离的过程中,放卷组件5将把包装袋放卷,撑料组件6将把包装袋内部撑起,切断组件将把被撑起的包装袋切断,套袋组件8将带动被切断的包装袋下降套在传送带4上的塑料杯上。
30.如图1和图2所示,分离组件3在支架1上周向设有三组,分离组件3包括固定在支架1上的第一电机31,第一电机31的输出轴沿竖直方向延伸并固定套设有位于传送带4上方的套环32,套环32位于导料通道2的下方;套环32上固定套设有套筒33,套筒33的外壁上设有螺旋槽331,螺旋槽331贯穿于套筒33的上下两端。当第一电机31带动套环32和套筒33旋转时,套筒33将使得塑料杯的杯沿进入到螺旋槽331内,导料通道2内最下侧的塑料杯将被套筒33带动下降至传送带4上,而其余塑料杯将被套筒33阻挡,从而实现了塑料杯的分离。
31.如图1所示,放卷组件5包括转动连接于支架1的转盘51和导向辊52,转盘51上固定有若干支撑杆53,成卷的包装袋能够套紧在多根支撑杆53上,保证了包装袋的稳定性;且包装袋在放卷时将带动转盘51和导向辊52旋转,以便包装袋的放卷。
32.如图1和图3所示,撑料组件6包括呈竖直设置的立柱61和若干通过水平轴621转动连接于支架1的限位轮62,立柱61的侧壁上设有若干供限位轮62转动嵌设的嵌设槽611,限位轮62与嵌设槽611槽壁之间设有穿设腔。绕过导向辊52的包装袋将套设在立柱61上,立柱61将把包装袋的内侧撑起,且包装带将处于穿设腔内,限位轮62将把包装带压在嵌设槽611的槽壁上,限位轮62实现了对立柱61的支撑,保证了立柱61的稳定性。
33.切割组件7包括两个固定在支架1上的电缸71,电缸71的活塞杆上固定有切刀72,立柱61的侧壁上设有供切刀72滑动嵌设的环槽612。套袋组件8包括四个固定在支架1上的第二电机81,四个第二电机81两两分设于切刀72的上下两侧,第二电机81的输出轴上套设有转轮82。支架1上还设有控制组件9,控制组件9包括处理器91和固定在支架1上的红外传感器92,红外传感器92和两个第二电机81均耦接于处理器91。
34.当红外传感器92检测到被传送带4输送的塑料杯时,红外传感器92将向处理器91发送启动信号,处理器91将先控制两个电缸71进行伸缩运动,使得切刀72将包装袋压入到环槽612内,实现了包装袋的切断;然后处理器91再控制两个第二电机81启动指定的时间,使得下侧第二电机81带动转轮82将切断的包装袋输送套设在传送带4上表面的塑料杯上,实现了塑料杯的自动套袋,处理器91还使得上侧第二电机81带动转轮82将包装袋的待切割处输送至切刀72处,以便包装袋的下次切断。
35.本技术实施例一种塑料杯自动套标机的实施原理为:在塑料杯的加工过程中,第一电机31将带动套环32和套筒33旋转,套筒33将使得塑料杯的杯沿进入到螺旋槽331内,导料通道2内最下侧的塑料杯将被套筒33带动下降至传送带4上,而其余塑料杯将被套筒33阻挡。
36.当红外传感器92检测到被传送带4输送的塑料杯时,红外传感器92将向处理器91发送启动信号,处理器91将先控制两个电缸71带动切刀72将包装袋切断,再控制下侧第二电机81带动转轮82将切断的包装袋输送套设在传送带4上表面的塑料杯上,并控制上侧第
二电机81带动转轮82将包装袋的待切割处输送至切刀72处。因此,本技术实现了塑料杯的自动分离和自动套袋,从而提高了塑料杯的加工效率。
37.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1