便携式智能激光上料装置的制作方法
1.本实用新型涉及上料装置领域,特别是涉及便携式智能激光上料装置。
背景技术:
2.机床上料装置是将待加工工件送装到机床上的加工位置的自动或半自动机械装置,又称工件自动装卸装置,大部分机床上下料装置的下料机构比较简单,或上料机构兼有下料功能,所以机床的上下料装置也常被简称为上料装置,机床上下料装置是自动机床的一个组成部分。半自动机床加设上料装置后,可使加工循环连续自动进行,成为自动机床。机床上料装置用于效率高、机动时间短、工件装卸频繁的半自动机床,能显著地提高生产效率和减轻体力劳动。机床上下料装置也是组成自动生产线的必不可少的辅助装置。
3.目前市面上所使用的大型激光切割机,上料过程基本上都是需要两个及以上的人,通过人工的方式去将不锈钢板材搬至上料平台上,如果是比较厚的板材,搬运过程是非常吃力的,并且对工人来说具有一定的危险性。降低了工作效率,人工劳动强度较大,比较浪费人工。对于目前市面上已经存在的悬臂式真空吸盘上料机,仍然是需要一个人去手动操作旋转,整个上料过程也是比较繁琐和具备危险性的,存在一定缺陷。
技术实现要素:
4.本实用新型的目的在于,提供便携式智能激光上料装置,实现便于钢材上料,操作简便、安全,提高上料效率,且避免因人工上料导致受伤风险。
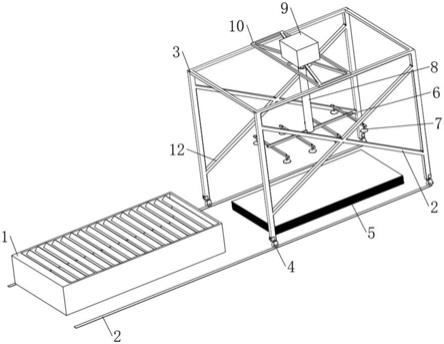
5.为解决上述技术问题,本实用新型提供便携式智能激光上料装置,包括激光上料台,所述激光上料台前后侧均设有移动轨道,所述激光上料台右侧设有整体框架,所述整体框架底部对称设有若干个驱动轮,且所述驱动轮远离所述整体框架中心一侧均设有传感器,所述整体框架下方设有钢材板,所述钢材板上方通过安装架等距设有若干个吸盘,所述安装架上表面传动连接有液压缸,所述液压缸上端连接有控制箱,所述控制箱底面通过固定架固定安装在整体框架上端。
6.进一步的,所述传感器为轨迹传感器。
7.进一步的,所述液压缸的活塞杆底部设有缓冲块。
8.进一步的,所述整体框架前后端均交叉设有若干根加强杆。
9.进一步的,所述吸盘均为电动吸盘。
10.与现有技术相比,本实用新型提供的便携式智能激光上料装置,实现了便于钢材上料,操作简便、安全,提高上料效率,且避免因人工上料导致受伤风险。
附图说明
11.图1为本实用新型便携式智能激光上料装置的整体结构示意图;
12.图2为本实用新型便携式智能激光上料装置的俯视结构示意图;
13.图3为本实用新型便携式智能激光上料装置的正视结构示意图;
14.图4为本实用新型便携式智能激光上料装置的左视结构示意图。
具体实施方式
15.下面将结合示意图对本实用新型的便携式智能激光上料装置进行更详细的描述,其中表示了本实用新型的优选实施例,应该理解本领域技术人员可以修改在此描述的本实用新型,而仍然实现本实用新型的有利效果。因此,下列描述应当被理解为对于本领域技术人员的广泛知道,而并不作为对本实用新型的限制。
16.在下列段落中参照附图以举例方式更具体地描述本实用新型。根据下面说明和权利要求书,本实用新型的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本实用新型实施例的目的。
17.如图1至图4所示,本实用新型实施例提出了便携式智能激光上料装置,包括激光上料台1,所述激光上料台1前后侧均设有移动轨道2,所述激光上料台1右侧设有整体框架3,所述整体框架3底部对称设有若干个驱动轮4,且所述驱动轮4远离所述整体框架3中心一侧均设有传感器11,所述整体框架3下方设有钢材板5,所述钢材板5上方通过安装架6等距设有若干个吸盘7,所述安装架6上表面传动连接有液压缸8,所述液压缸8上端连接有控制箱9,所述控制箱9底面通过固定架10固定安装在整体框架3上端。
18.由此,整体框架3通过驱动轮4的驱动实现移动,在传感器11的作用下,对整体框架3的行进轨迹进行监测,并将数据上传至控制箱9,进行行进轨迹的分析、纠正,确保整体框架3始终依照移动轨道2进行移动,整体框架3通过智能识别系统,随着指定的移动轨道2到达钢材板5放置区域,整体框架3移动至钢材板5正上方,然后操作者通过遥控装置打开液压缸8使其伸长,将吸盘7装置放下至贴合钢材板5,吸盘7与位于最上层的钢材板5上表面接触,使吸盘7进行抽真空,对钢材板5进行吸取、定位,再使液压缸8进行收缩,将钢材板5提起,驱动轮4带动整体框架3进行移动,移动至激光上料台1上方,打开液压缸8使其伸长,使得吸盘7内充气,松开钢材板5,实现上料,其中,轨迹传感器为市面常见的电子产品,故此具体电路不再赘述。
19.所述传感器11为轨迹传感器。在本实施方式中,通过在驱动轮4上设置轨迹传感器,对驱动轮4的移动轨迹进行监测,使得整体框架3的行动轨迹是依照移动轨道2进行的,以确保整体框架3对钢材板5的定位抓取与松开上料。
20.所述液压缸8的活塞杆底部设有缓冲块。在本实施方式中,在液压缸8的活塞杆底部设置缓冲块,在吸盘7与钢材板5接触时进行缓冲,增加对吸盘7的保护能力,避免对吸盘7进行挤压导致其损坏,以延长其使用寿命。
21.所述整体框架3前后端均交叉设有若干根加强杆12。在本实施方式中,通过交叉设置加强杆12,以提高整体框架3的强度,延长其使用寿命。
22.所述吸盘7均为电动吸盘。在本实施方式中,将吸盘7通过接管与真空设备接通,然后与待提升物如玻璃、纸张等接触,打开抽真空设备抽吸空气,使吸盘7内产生负气压,从而将待提升物吸牢,即可开始搬送待提升物,当待提升物搬送到目的地时,平稳地充气进吸盘7内,使吸盘7内由负气压变成零气压或稍为正的气压,吸盘7就脱离待提升物,从而完成了提升搬送重物的任务,抽真空与充气的过程均通过电动气泵实现,吸盘7是真空设备执行器之一,吸盘7材料采用丁腈橡胶制造,具有较大的扯断力。
23.以下列举所述便携式智能激光上料装置的较优实施例,以清楚的说明本实用新型的内容,应当明确的是,本实用新型的内容并不限制于以下实施例,其他通过本领域普通技术人员的常规技术手段的改进亦在本实用新型的思想范围之内。
24.本实用新型实施例提出了便携式智能激光上料装置的使用方法,包括如下步骤:先通过驱动轮4驱动整体框架3移动至钢材板5正上方,通过传感器11对钢材板5位置进行定位,打开液压缸8使其伸长,吸盘7与位于最上层的钢材板5上表面接触,使吸盘7进行抽真空,对钢材板5进行吸取、定位,再使液压缸8进行收缩,将钢材板5提起,驱动轮4带动整体框架3进行移动,移动至激光上料台1上方,打开液压缸8使其伸长,使得吸盘7内充气,松开钢材板5,实现上料,如此往复,即可实现钢材板5的持续上料。
25.综上所述,本实用新型具有如下有益效果:
26.操作简便,运行过程由控制箱9进行控制,通过传感器11对运行轨迹进行智能识别,保证设备按预设的移动轨道2进行移动,运行比较平稳,一人即可操作,降低人工成本,且全程不用人工进行搬运,降低人工体力消耗,上料过程运行平稳,有效减少材料表面划伤,上料效率高,提高生产产能。
27.显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1