电堆吊运工装的制作方法
1.本实用新型属于电堆吊装技术领域,具体涉及一种电堆吊运工装。
背景技术:
2.堆是发生电化学反应的场所,也是燃料电池动力系统核心部分,由多个单体电池以串联方式层叠组合构成。将双极板与膜电极交替叠合,各单体之间嵌入密封件,经前、后端板压紧后用螺杆紧固拴牢,即构成燃料电池电堆。
3.对于大中型的电堆在安装时,需要使用起吊装置吊起电堆,并缓慢移动起吊装置,在到达预定位置后,再通过起吊装置缓慢放下电堆,并装配电堆;在此过程中,工作人员需要全程在旁边监控着电堆,而电堆因其重量和体积均极大,因此也不可避免的会对周围的工作人员带来不可控的风险。
技术实现要素:
4.针对上述现有技术存在的问题,本实用新型提供一种电堆吊运工装,该工装无需工作人员在旁边监控着电堆,通过控制器与工业遥控器即可实现移动整个电堆,安全可靠,省时省力。
5.为实现上述目的,本实用新型提供一种电堆吊运工装,包括电动履带底盘、缆绳和电推杆,所述电动履带底盘的上部设置有电动回转平台,电动回转平台上设置有电动绞盘、配重箱、立柱,立柱垂直设置于电动回转平台上,立柱的顶端通过铰链与电动伸缩吊臂的一端连接,电动伸缩吊臂另一端的下部设有吊钩;所述电推杆的两端均通过铰链且分别与电动伸缩吊臂的中部和立柱的中部连接;所述缆绳的一端与吊钩连接,另一端沿电动伸缩吊臂设置并缠绕在电动绞盘的外壁;
6.所述电动履带底盘的内部安装有控制器,控制器分别与电动绞盘、电动履带底盘、电动伸缩吊臂、电推杆、电动回转平台电连接,控制器与工业遥控器无线电连接。
7.优选的,电动伸缩吊臂的最大伸缩长度为5-6m。
8.优选的,立柱的高度为4-5m。
9.优选的,配重箱的重量为300-500公斤。
10.优选的,电推杆的推力不小于10000牛顿。
11.与现有技术相比,本实用新型通过设置的立柱、电动伸缩吊臂、电推杆、电动绞盘、缆绳和吊钩用于吊起电堆,通过电动绞盘来控制缆绳,进一步控制吊钩的升降;通过设置的电动履带底盘用于移动整个电堆;配种箱用于增加本实用新型底盘的重量,放置吊钩挂起重量级的电堆而导致本实用新型的翻倒;另外,全程主要依靠工作人员遥控,不需全程伴随电堆,最终达到在吊装移动电堆时安全可靠且省时省力的效果。
附图说明
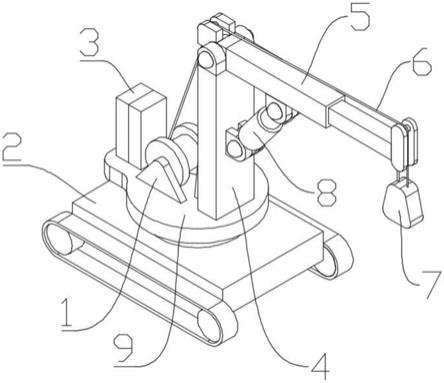
12.图1是本实用新型的整体结构示意图ⅰ;
13.图2是本实用新型的整体结构示意图ⅱ;
14.图中:1、电动绞盘,2、电动履带底盘,3、配重箱,4、立柱,5、电动伸缩吊臂,6、缆绳,7、吊钩,8、电推杆,9、电动回转平台。
具体实施方式
15.下面结合附图对本实用新型作进一步说明。
16.如图1至图2所示,一种电堆吊运工装,包括电动履带底盘2、缆绳6和电推杆8,所述电动履带底盘2的上部设置有电动回转平台9,电动回转平台9上设置有电动绞盘1、配重箱3、立柱4,立柱4垂直设置于电动回转平台9上,立柱4的顶端通过铰链与电动伸缩吊臂5的一端连接,电动伸缩吊臂5另一端的下部设有吊钩7;所述电推杆8的两端均通过铰链且分别与电动伸缩吊臂5的中部和立柱4的中部连接;所述缆绳6的一端与吊钩7连接,另一端沿电动伸缩吊臂5设置并缠绕在电动绞盘1的外壁;
17.所述电动履带底盘2的内部安装有控制器,控制器分别与电动绞盘1、电动履带底盘2、电动伸缩吊臂5、电推杆8、电动回转平台9电连接,控制器分别控制电动绞盘1、电动履带底盘2、电动伸缩吊臂5、电推杆8、电动回转平台9工作,控制器与工业遥控器无线电连接。
18.优选的,电动伸缩吊臂5的最大伸缩长度为5-6m。
19.优选的,立柱4的高度为4-5m。
20.优选的,配重箱3的重量为300-500公斤。
21.优选的,电推杆8的推力不小于10000牛顿。
22.在使用时,工作人员通过工业遥控器控制本工装的启动与关闭,通过工业遥控器控制电动履带底盘2将本实用新型移动至电堆附近,并旋转立柱4、电动伸缩吊臂5和吊钩7吊起电堆;接着控制电动履带底盘2将电堆移动至预定位置,并装配电堆即可。
技术特征:
1.一种电堆吊运工装,其特征在于,包括电动履带底盘(2)、缆绳(6)和电推杆(8),所述电动履带底盘(2)的上部设置有电动回转平台(9),电动回转平台(9)上设置有电动绞盘(1)、配重箱(3)、立柱(4),立柱(4)垂直设置于电动回转平台(9)上,立柱(4)的顶端通过铰链与电动伸缩吊臂(5)的一端连接,电动伸缩吊臂(5)另一端的下部设有吊钩(7);所述电推杆(8)的两端均通过铰链且分别与电动伸缩吊臂(5)的中部和立柱(4)的中部连接;所述缆绳(6)的一端与吊钩(7)连接,另一端沿电动伸缩吊臂(5)设置并缠绕在电动绞盘(1)的外壁;所述电动履带底盘(2)的内部安装有控制器,控制器分别与电动绞盘(1)、电动履带底盘(2)、电动伸缩吊臂(5)、电推杆(8)、电动回转平台(9)电连接,控制器与工业遥控器无线电连接。2.根据权利要求1所述的一种电堆吊运工装,其特征在于,电动伸缩吊臂(5)的最大伸缩长度为5-6m。3.根据权利要求1或2所述的一种电堆吊运工装,其特征在于,立柱(4)的高度为4-5m。4.根据权利要求1或2所述的一种电堆吊运工装,其特征在于,配重箱(3)的重量为300-500公斤。5.根据权利要求1或2所述的一种电堆吊运工装,其特征在于,电推杆(8)的推力不小于10000牛顿。
技术总结
本实用新型公开了一种电堆吊运工装,包括电动履带底盘、缆绳和电推杆,电动履带底盘上部设置有电动回转平台,电动回转平台上设置有电动绞盘、配重箱、立柱,立柱的顶端通过铰链与电动伸缩吊臂的一端连接,电动伸缩吊臂另一端的下部设有吊钩;电推杆的两端均通过铰链且分别与电动伸缩吊臂的中部和立柱的中部连接;缆绳的一端与吊钩连接,另一端沿电动伸缩吊臂设置并缠绕在电动绞盘的外壁;电动履带底盘的内部安装有控制器,控制器分别与电动绞盘、电动履带底盘、电动伸缩吊臂、电推杆、电动回转平台电连接,控制器与工业遥控器无线电连接。该工装无需工作人员在旁边监控着电堆,通过控制器与工业遥控器即可实现移动整个电堆,安全可靠,省时省力。省时省力。省时省力。
技术研发人员:王岩 孙凯华 武浩浩 穆建平 郭亚明 于溟
受保护的技术使用者:徐州华清京昆能源有限公司
技术研发日:2021.07.02
技术公布日:2022/1/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1