用于翻转载具的翻转机构的制作方法
1.本实用新型涉及了机械翻转领域,具体的是一种用于翻转载具的翻转机构。
背景技术:
2.用于翻转载具的翻转机构是用于将载具翻转预设角度的一种机构。现有的翻转载具通过两个夹爪部夹持载具,两个夹爪部分别与对应的旋转模块固定连接,进而通过两个旋转模块带动两个夹爪部实现对于翻转机构的翻转。但现有的翻转机构中,夹爪部需与翻转机构对应设置,翻转机构一般为翻转电机,存在翻转机构需求过大导致的成本较高的问题。此外,两个翻转机构很难实现同步运动导致载具两端翻转角度不同,带来翻转精度差的问题。
技术实现要素:
3.为了克服现有技术中的缺陷,本实用新型实施例提供了一种用于翻转载具的翻转机构,其用于解决上述成本较高且翻转精度差的问题。
4.本技术实施例公开了:一种用于翻转载具的翻转机构,包括:第一伸缩单元,所述第一伸缩单元具有沿第一方向延伸的第一壁杆和第二壁杆,所述第一壁杆和所述第二壁杆能沿相反方向移动;第一移动单元,所述第一移动单元与所述第一壁杆固定连接并随所述第一壁杆运动,所述第一移动单元固定连接有旋转模块和与所述旋转模块固定连接的第一夹持单元;第二移动单元,所述第二移动单元与所述第二壁杆固定连接并随所述第二壁杆运动,所述第二移动单元轴承连接有第二夹持单元,所述第二夹持单元与所述第一夹持单元对应设置以夹持载具,所述旋转模块能在所述第一夹持单元和所述第二夹持单元夹持载具状态下驱使所述第二夹持单元转动;限位组件,所述限位组件包括固定限位单元,所述固定限位单元能在所述第一夹持单元和/或第二夹持单元转动至预设角度后与所述第一夹持单元和/或第二夹持单元抵接。
5.进一步地,所述第一夹持单元和所述第二夹持单元包括固定在其上的旋转限位单元,所述旋转限位单元能与所述固定限位单元抵接。
6.进一步地,所述固定限位单元包括固定在所述第一移动单元和所述第二移动单元上的固定部和设置于所述固定部上的限位部,所述限位部凸出于所述固定部,所述限位部能与其相邻的所述第一夹持单元或所述第二夹持单元抵接。
7.进一步地,所述固定限位单元设置有高度可调节的接近传感器,所述接近传感器沿第二方向延伸。
8.进一步地,所述限位部的端部设置有磁吸部,所述旋转限位单元能在旋转过程中与所述磁吸部吸附。
9.进一步地,包括与所述第一伸缩单元固定连接的第一连接部,所述第一连接部与第二伸缩单元固定连接,所述第二伸缩单元沿第二方向运动。
10.进一步地,包括第二连接部,第二伸缩单元固定连接在所述第二连接部上,所述第
二连接部设置有沿第二方向上第一滑轨,所述第一滑轨与所述第一连接部滑动连接。
11.进一步地,所述第一连接部在所述第一伸缩单元的两端设置有沿所述第一方向延伸的第二滑轨,两个所述第二滑轨分别与所述第一移动单元和所述第二移动单元滑动连接。
12.进一步地,所述第一夹持单元包括与所述第一移动单元抵接的转接部和与所述转接部远离所述第一夹持单元的一侧转动连接的第一夹爪部;所述第二夹持单元包括与所述第二移动单元抵接的转接部和与所述转接部远离所述第二夹持单元的一侧转动连接的第二夹爪部;所述第一夹爪部和所述第二夹爪部对应设置以夹取所述载具。
13.进一步地,所述第一夹爪部和所述第二夹爪部的夹爪内侧设置有硬度60的硅胶。
14.本实用新型的有益效果如下:
15.1、通过两个夹持单元中的一个主动一个从动的效果,实现了节省翻转机构的效果,从而降低了翻转机构的成本。此外,通过第一夹持单元和第二夹持单元与固定限位单元之间的限位配合,使得第一夹持单元和第二夹持单元均可以翻转至预设角度,从而使得翻转精度较高。
16.2、旋转限位单元可以分别在临近第一夹持单元和第二夹持单元不同侧的固定限位单元时被其上的磁吸部吸附。从而可以加强固定限位单元和旋转限位单元之间的结合力且进一步提高翻转精度。
17.为让本实用新型的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
附图说明
18.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
19.图1是本实用新型实施例中用于翻转载具的翻转机构的第一工作状态下的结构示意图;
20.图2是本实用新型实施例中用于翻转载具的翻转机构的第二工作状态下的局部结构示意图;
21.图3是本实用新型实施例中用于翻转载具的翻转机构的第三工作状态下的局部结构示意图;
22.图4是本实用新型实施例中用于翻转载具的翻转机构的第一视角下的结构示意图;
23.图5是本实用新型实施例中用于翻转载具的翻转机构的第二视角下的结构示意图;
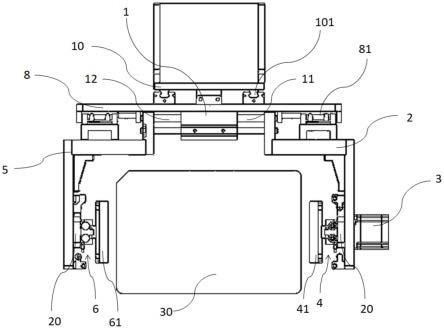
24.图6是本实用新型实施例中用于翻转载具的翻转机构的主视图;
25.以上附图的附图标记:1、第一伸缩单元;11、第一壁杆;12、第二壁杆;2、第一移动单元;3、旋转模块;4、第一夹持单元;41、第一夹爪部;5、第二移动单元;6、第二夹持单元;61、第二夹爪部;7、限位组件;71、固定限位单元;711、固定部;712、限位部;7121、磁吸部;
713、接近传感器;72、旋转限位单元;8、第一连接部;81、第二滑轨;9、第二伸缩单元;10、第二连接部;101、第一滑轨;20、转接部;30、载具。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.如图1至图6所示,本实施例的用于翻转载具的翻转机构,包括:
28.第一伸缩单元1,第一伸缩单元1可以具有沿第一方向延伸的第一壁杆11和第二壁杆12,第一方向可以为图6中纸面的宽方向,当然的,在其他可选的实施方式中,第一方向可以根据实际需要进行调整。第一壁杆11和第二壁杆12能沿相反方向移动,从而可以带动与第一壁杆11固定连接的第一移动单元2和与第二壁杆12固定连接的第二移动单元5在第一方向上沿相反方向运动。
29.第一移动单元2,第一移动单元2可以与第一壁杆11固定连接并随第一壁杆11运动,第一移动单元2可以固定连接有旋转模块3和与旋转模块3固定连接的第一夹持单元4。
30.第二移动单元5,第二移动单元5可以与第二壁杆12固定连接并随第二壁杆12运动,第二移动单元5可以轴承连接有第二夹持单元6,第二夹持单元6可以与第一夹持单元4对应设置以夹持载具30载具30。旋转模块3能在所述第一夹持单元4和所述第二夹持单元6夹持载具状态下驱使第二夹持单元6转动。
31.第一移动单元2和第二移动单元5可以包括与第一壁杆11和第二壁杆12固定连接的第一连接单元、沿第一方向延伸且与第一连接单元固定连接的第二连接单元,以及与第二单元远离第一伸缩单元1的一端固定连接的第三连接单元。第三连接单元可以沿第三方向延伸,第三方向可以垂直于第一方向,即在图6中,第三方向垂直于纸面的方向。当然的,在其他可选的实施方式中,第三方向可以根据实际需要进行调整。旋转模块3和第一夹持单元4可以固定在第一移动单元2的第三连接单元上,第二夹持单元6可以与第二移动单元5的第三连接单元轴承连接。
32.限位组件7,限位组件可以包括固定限位单元71,固定限位单元71能在第一夹持单元4和/或第二夹持单元6转动至预设角度后与第一夹持单元4和/或第二夹持单元6抵接。从而使得限位组件可以对第一夹持单元4和/或第二夹持单元6实现限位。
33.第一夹持单元4和所述第二夹持单元6可以包括固定在其上的旋转限位单元72,旋转限位单元72能与固定限位单元71抵接。
34.在本实施例中,预设角度为180
°
,翻转机构可以处于第一工作状态、第二工作状态和第三工作状态:
35.如图1所示,第一工作状态下第一壁杆11和第二壁杆12处于伸出状态。此时,第一夹持单元4和第二夹持单元6之间的距离大于载具30的长度,从而可以使得载具30可以被运动至第一夹持单元4和第二夹持单元6之间。
36.如图2所示,第二工作状态下第一壁杆11和第二壁杆12处于收缩状态。此时,第一夹持单元4和第二夹持单元6之间的距离小于载具30的长度,从而使得载具30可以位于第一
夹持单元4和第二夹持单元6之间,第一夹持单元4和第二夹持单元6处于夹持状态,从而对载具30两边都可以夹紧。在此状态下,旋转限位单元72与第一夹持单元4和第二夹持单元6一侧的固定限位单元71抵接并被该侧的固定限位单元71限位。
37.如图3所示,第二工作状态下的旋转模块3进行旋转,从而使得第一夹持单元4带动载具30进而带动第二夹持单元6进行旋转,并最终在翻转至180
°
时使得旋转限位单元72与第一夹持单元4和第二夹持单元6另一侧的固定限位单元71抵接并被该侧的固定限位单元71限位,从而达到第三工作状态并使得载具30相对于第二工作状态实现翻转。
38.借由上述结构,通过两个夹持单元中的一个主动一个从动的效果,实现了节省旋转模块3的效果,从而降低了翻转机构的成本。此外,通过第一夹持单元4和第二夹持单元6与固定限位单元71之间的限位配合,使得第一夹持单元4和第二夹持单元6均可以翻转至预设角度,从而使得翻转精度较高。
39.具体的,如图2和3所示,固定限位单元71可以包括固定在第一移动单元2和第二移动单元5上的固定部711和设置于固定部711上的限位部712。限位部712可以凸出于固定部711,限位部712能与其相邻的第一夹持单元4或第二夹持单元6抵接。限位部712可以沿第二方向延伸,第二方向可以垂直于第一方向,第二方向可以为图6中纸面的长度方向。当然的,在其他可选的实施方式中,限位部712的延伸方向可以根据实际需要进行调整。从而使得旋转模块3转动过程中,限位部712可以通过对旋转限位单元72进行接触从而限制第一夹取单元、第二夹取单元和载具30的旋转角度。
40.具体的,如图2和3所示,固定限位单元71可以设置有高度可调节的接近传感器713,接近传感器713可以在与旋转限位单元72接触后释放到位信号并将该到位信号传输至中控部(图中未示出),从而由中控部控制翻转机构进行后续操作,从而使得其与其他模组更易配合,从而依据情况实现后续的移动或防止载板等操作。接近传感器713可以沿第二方向延伸,从而可以使得在旋转限位单元72与限位部712限位后,接近传感器713可以在不受到旋转限位单元72作用力的作用下识别到旋转限位单元72的接近信息。
41.具体的,如图3所示,限位部712的端部可以设置有磁吸部7121,旋转限位单元72能在旋转过程中与磁吸部7121吸附。在本实施例中,即第二工作状态和第三工作状态下,旋转限位单元72可以分别在临近第一夹持单元4和第二夹持单元6不同侧的固定限位单元71时被其上的磁吸部7121吸附。从而可以加强固定限位单元71和旋转限位单元72之间的结合力且进一步提高翻转精度。
42.具体的,如图1和图4所示,包括与第一伸缩单元1固定连接的第一连接部8,第一连接部8可以与第二伸缩单元9固定连接,第二伸缩单元9可以沿第二方向运动,使得第二伸缩单元9在进行伸缩运动的过程中可以带动第一连接部8在第二方向上运动,进而带动第一伸缩单元1以及第一移动单元2和第二移动单元5在第二方向上运动。
43.在本实施例中,在旋转模块3转动过程中,第二伸缩单元9带动第一连接部8在第二方向上运动,从而可以通过调整第一连接部8的位置防止载板在翻转过程中与其他机构之间发生干涉。
44.具体的,如图1和图6所示,包括第二连接部10,第二伸缩单元9固定连接在第二连接部10上,第二连接部10可以设置有沿第二方向上的第一滑轨101,第一滑轨101可以与第一连接部8滑动连接,从而可以使得第一滑轨101对第一连接部8可以起到导向作用,增加了
整个翻转机构的稳定性。
45.具体的,如图1所示,第一连接部8可以在第一伸缩单元1的两端设置有沿第一方向延伸的第二滑轨81,两个第二滑轨81可以分别与第一移动单元2和第二移动单元5滑动连接,从而使得两个第二滑轨81可以在对第一移动单元2和第二移动单元5实现导向的作用之外,也可以对其提供支撑作用。
46.具体的,如图1至图3所示,第一夹持单元4可以包括与第一移动单元2抵接的转接部20和与转接部20远离第一夹持单元4的一侧转动连接的第一夹爪部41。第二夹持单元6可以包括与第二移动单元5抵接的转接部20和与转接部20远离第二夹持单元6的一侧转动连接的第二夹爪部61。转接部20可以对第一夹持单元4和第一夹持单元4以及第二移动单元5和第二夹持单元6之间起到连接作用,从而加固整个结构。第一夹爪部41和第二夹爪部61可以对应设置以夹取载具30。
47.具体的,第一夹爪部41和第二夹爪部61的夹爪内侧可以设置有硬度为60的硅胶,从而在加大第一夹爪部41和第二夹爪部61与载具30之间的摩擦力的同时可以防止损坏载具30,避免了在反转过程中第一夹爪部41和第二夹爪部61损坏载具30的情况。
48.本实用新型中应用了具体实施例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1