一种纸袋生产用自纠偏传送装置的制作方法
1.本实用新型属于纸袋生产设备技术领域,具体涉及一种纸袋生产用自纠偏传送装置。
背景技术:
2.随着社会的不断发展,人们的环保意识逐步增强。纸袋的生产原料是可再生资源,本身可降解,可回收利用,且绿色环保,因此纸袋的使用逐步代替了塑料袋。纸袋按照不同用途可分为:手提袋、饲料袋、化肥袋、食品袋、购物袋等,经济适用。
3.现有技术中,纸袋生产多由多层纸张叠加进行生产,而纸张进行传送时,由于驱动电机造成的震动及其它因素,导致纸张传送发生偏移,影响多层纸张的叠加效果,进行影响整个纸袋的韧性和生产质量。
技术实现要素:
4.本实用新型的目的是提供一种纸袋生产用自纠偏传送装置,通过检测传送辊至支架的距离,夹持组件夹紧传送辊后通过驱动组件驱动进行水平移动,实现自纠偏传送,确保纸袋的生产质量。
5.本实用新型提供了如下的技术方案:
6.本技术提出一种纸袋生产用自纠偏传送装置,包括:
7.支撑组件;
8.传送辊组,包括多个插设于支撑组件上的传送辊,所述传送辊一侧连接有传送电机,相邻传送辊间设有用于使多个传送辊处于同一竖直轴线上的连接组件;
9.纠偏机构,包括多个超声波传感器、夹持组件和驱动组件,所述超声波传感器分别嵌于传送辊远离夹持组件一端,所述驱动组件包括驱动电机、螺纹杆、相对设于螺纹杆两侧的滑杆、滑动座和设于滑动座内且与螺纹杆啮合连接的传送杆,所述驱动电机连接螺纹杆且驱动传送杆、滑动座和夹持组件水平滑动,所述夹持组件包括夹爪组件,所述夹持组件设于滑动座上且通过夹爪组件夹紧传送辊,且随传送杆在滑杆上水平移动实现纠偏。
10.优先地,所述支撑组件包括基座和支撑架,所述支撑架设于基座上,所述传送辊插设于支撑架内。
11.优先地,所述连接组件包括固定环和连接杆,所述固定环设于传送辊两端,所述连接杆连接相邻传送辊间的同侧固定环。
12.优先地,所述基座上且位于支撑架一侧设有底座,所述底座上相对设有固定块且螺纹杆插设于相对的固定块之间,所述滑杆相对设于相对的固定之间且位于螺纹杆两侧,所述滑动座呈倒u形且滑动座与滑杆滑动连接。
13.优先地,所述夹爪组件包括一端交叉连接的两个夹爪,所述夹爪靠近驱动组件一端设有滑槽,所述夹爪远离驱动组件一端相对设有弧形块。
14.优先地,所述夹持组件还包括支架、夹持气缸和驱动杆,所述支架设于滑动座上,
所述夹爪交叉设于支架顶部一侧,所述夹持气缸设于滑动座上远离夹爪一侧,所述夹持气缸连接有活塞杆,所述活塞杆顶部与驱动杆垂直连接,所述驱动杆插设于滑槽内。
15.本实用新型的有益效果是:
16.1.连接组件确保相邻传送辊处于同一竖直轴线上,确保纸张的传送方向;
17.2.通过超声波传感器检测传送辊至支撑架的距离,检测到的距离之差超过阈值时,夹持气缸通过活塞杆带动驱动杆在滑槽内滑动,使夹爪夹紧传送辊,驱动电机驱动螺纹杆转动,螺纹杆通过传送杆驱动滑动座带动夹持组件和传送辊水平移动,实现自纠偏,自动化纠偏,操作便捷,确保纸袋的生产质量。
附图说明
18.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
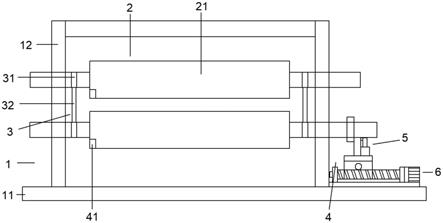
19.图1是本实用新型的连接示意图;
20.图2是本实用新型的夹持组件连接示意图;
21.图3是本实用新型的驱动组件连接示意图;
22.图4是本实用新型的滑动座连接示意图。
23.图中标记为:1.支撑组件,11.基座,111.底座,112.固定块,12.支撑架,2.传送辊组,21.传送辊,3.连接组件,31.固定环,32.连接杆,4.纠偏机构,41.超声波传感器,5.夹持组件,51.夹爪,511.滑槽,512.弧形块,52.支架,53.夹持气缸,54.活塞杆,55.驱动杆,6.驱动组件,61.驱动电机,62.螺纹杆,63.滑杆,64.滑动座,65.传送杆。
具体实施方式
24.本技术提出一种纸袋生产用自纠偏传送装置,包括:
25.如图1所示,支撑组件1,支撑组件1包括基座11和支撑架12,支撑架12设于基座11上,传送辊21插设于支撑架12内。基座11上且位于支撑架12一侧设有底座111,底座111上相对设有固定块112且螺纹杆62插设于相对的固定块112之间,滑杆63相对设于相对的固定之间且位于螺纹杆62两侧,滑动座64呈倒u形且滑动座64与滑杆63滑动连接。
26.如图1所示,传送辊组2,包括多个插设于支撑组件1上的传送辊21,传送辊21一侧连接有传送电机,相邻传送辊21间设有用于使多个传送辊21处于同一竖直轴线上的连接组件3。连接组件3包括固定环31和连接杆32,固定环31设于传送辊21两端,连接杆32连接相邻传送辊21间的同侧固定环31,确保相邻传动辊形成整体,在发生偏移时便于统一调整。
27.如图1、图3和图4所示,纠偏机构4,包括多个超声波传感器41、夹持组件5和驱动组件6,超声波传感器41分别嵌于传送辊21远离夹持组件5一端,驱动组件6包括驱动电机61、螺纹杆62、相对设于螺纹杆62两侧的滑杆63、滑动座64和设于滑动座64内且与螺纹杆62啮合连接的传送杆65,驱动电机61连接螺纹杆62且驱动传送杆65、滑动座64和夹持组件5水平滑动。
28.如图2所示,夹持组件5包括夹爪51组件,夹持组件5设于滑动座64上且通过夹爪51组件夹紧传送辊21,且随传送杆65在滑杆63上水平移动实现纠偏。夹爪51组件包括一端交叉连接的两个夹爪51,夹爪51靠近驱动组件6一端设有滑槽511,夹爪51远离驱动组件6一端
相对设有弧形块512。夹持组件5还包括支架52、夹持气缸53和驱动杆55,支架52设于滑动座64上,夹爪51交叉设于支架52顶部一侧,夹持气缸53设于滑动座64上远离夹爪51一侧,夹持气缸53连接有活塞杆54,活塞杆54顶部与驱动杆55垂直连接,驱动杆55插设于滑槽511内。
29.如图1-4所示,超声波传感器41、驱动电机61和夹持气缸53均连接有控制器,生产前,在控制器内设置偏移阈值。通过超声波传感器41实时检测传送辊21至支撑架12的距离。当因震动或其他因素导致传送辊21偏移,使相邻两次检测到的距离之差的绝对值大于偏移阈值时,控制器控制夹持气缸53推动活塞杆54向上移动,活塞杆54带动驱动杆55在滑槽511内向上滑动,使夹爪51夹紧传送辊21。之后,控制器控制驱动电机61驱动螺纹杆62转动,螺纹杆62驱动传送杆65转动,传送杆65带动滑动座64、夹持组件5和夹紧的传送辊21沿滑杆63水平移动,实现子纠偏,当传送辊21至支撑架12侧壁的距离恢复初始距离时,停止纠偏。
30.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1