自动化立体仓库用的双工位拆盘穿梭车的制作方法
1.本实用新型涉及一种带拆码盘机的双工位穿梭车,既能输送货物,又可以自动拆盘和码盘,实现自托盘的即时供给和回收,从而大大提高物流效率。
背景技术:
2.多巷道自动化立体仓库中,在相邻两排货架之间,均设置有堆垛机行走巷道;堆垛机沿巷道行走,将码垛好的放在托盘上的货物移载到货架上;托盘与货物的结合是在库前输送系统进行的,库前输送系统一般包括托盘输送系统和机器人码垛系统,在托盘输送系统的一侧设置有固定的拆盘机,拆盘机将一跺空托盘拆分到托盘输送线上,空托盘被输送到机器人码垛系统的码垛工位,进行托盘与货物的结合码垛,被码垛好的货物和托盘结合后形成成品,返回到托盘输送系统后,由堆垛机货叉叉起后,转运到堆垛机上,堆垛机再通过堆垛机行走巷道将成品运送到相对应的货架上。
3.现有设备拆盘机是设置在托盘输送系统的固定位置上,这就需要设计托盘输送线,才能将拆分后的空托盘逐一输送到机器人码垛工位处,码垛好的托盘与货物结合后的成品,仍需要借助于托盘输送线运送到堆垛机上,这样导致了库前系统的输送节拍较慢;而且布设托盘输送线还存在成本高及占用空间大的缺陷;拆盘机由链式输送机和升降机构两部分组成,由两个电机分别实现链条的传动和升降机构的升降;升降机构采用电机减速机带动曲柄连杆机构,实现升降机构的升降动作,这两种机构在同一拆盘机中结合,需要占据较大的空间,如何将拆盘机结合到穿梭车上,并做到小型化,成为现场需要解决的一个问题;另外,如何同时完成拆盘和转载成品的双项任务,也是现场需要解决的另一个问题。
技术实现要素:
4.本实用新型提供了一种自动化立体仓库用的双工位拆盘穿梭车,解决了如何将拆盘机结合到穿梭车上并做到小型化的技术问题。
5.一种自动化立体仓库用的双工位拆盘穿梭车,包括拆盘穿梭车轨道,在拆盘穿梭车轨道上设置有可沿轨道行走的穿梭车车体架,在穿梭车车体架的一侧设置有拆盘穿梭车驱动电机,在穿梭车车体架上,分别设置有拆盘机和成品链式输送机;在穿梭车车体架的中部,固定设置有举升机构安装板,在举升机构安装板上,设置有一对主动链轮轴轴承和一对从动链轮轴轴承,在一对主动链轮轴轴承中设置有主动链轮轴,在一对从动链轮轴轴承中设置有从动链轮轴,在主动链轮轴上设置有主动链轮,在从动链轮轴上设置有从动链轮,在主动链轮与从动链轮之间设置有传动链条,在举升机构安装板的下底面上吊接有举升驱动电机,举升驱动电机的输出轴与主动链轮轴通过驱动链条机械连接在一起;在主动链轮轴的左端连接有左主动摆臂,在主动链轮轴的右端连接有右主动摆臂,在从动链轮轴的左端连接有左从动摆臂,在从动链轮轴的右端连接有右从动摆臂,在左主动摆臂的下端、右主动摆臂的下端、左从动摆臂的下端、右从动摆臂的下端,均连接有一个滚轮,在左主动摆臂的下端与左从动摆臂的下端之间,设置有左举升横梁,在左举升横梁的内侧立面上分别设置
有左前长条状凹槽和左后长条状凹槽,左从动摆臂下端的滚轮设置在左前长条状凹槽中,左主动摆臂的下端的滚轮设置在左后长条状凹槽中,在右主动摆臂的下端与右从动摆臂的下端之间设置有右举升横梁;在穿梭车车体架上设置有拆盘机龙门框架,在拆盘机龙门框架的下端设置有拆盘摆动叉,在拆盘摆动叉上设置有一摞空托盘,一摞空托盘设置在左举升横梁和右举升横梁的正上方;在左举升横梁和右举升横梁的外侧的穿梭车车体架上设置有拆盘后空盘传送机传送导轨。
6.成品链式输送机上设置有成品托盘,在成品托盘上设置有码垛好的货物。
7.本实用新型将拆盘机与成品移载链式输送机集成在一个穿梭小车上,将举升机构嵌入在小车行走轨道中间,在此狭小的空间中,既能实现举升,又不影响车体的运行,能够将输送面的输送高度降低到600毫米。
附图说明
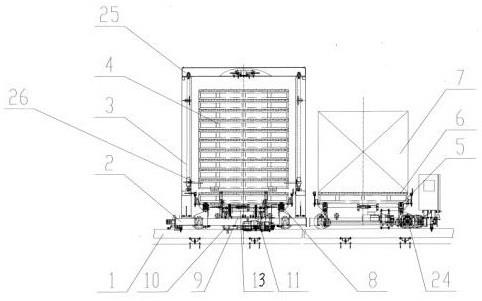
8.图1是本实用新型在主视方向上的结构示意图;
9.图2是本实用新型的穿梭车车体架2设置在拆盘穿梭车轨道1上的结构示意图;
10.图3是本实用新型在俯视方向上的结构示意图;
11.图4是本实用新型的设置在穿梭车车体架2上的拆盘机3的结构示意图;
12.图5是本实用新型的拆盘机3中的举升机构的结构示意图;
13.图6是本实用新型的拆盘机3在侧视方向上的结构示意图。
具体实施方式
14.下面结合附图对本实用新型进行详细说明:
15.一种自动化立体仓库用的双工位拆盘穿梭车,包括拆盘穿梭车轨道1,在拆盘穿梭车轨道1上设置有可沿轨道行走的穿梭车车体架2,在穿梭车车体架2的一侧设置有拆盘穿梭车驱动电机24,在穿梭车车体架2上,分别设置有拆盘机3和成品链式输送机5;在穿梭车车体架2的中部,固定设置有举升机构安装板9,在举升机构安装板9上,设置有一对主动链轮轴轴承和一对从动链轮轴轴承,在一对主动链轮轴轴承中设置有主动链轮轴13,在一对从动链轮轴轴承中设置有从动链轮轴14,在主动链轮轴13上设置有主动链轮11,在从动链轮轴14上设置有从动链轮12,在主动链轮11与从动链轮12之间设置有传动链条,在举升机构安装板9的下底面上吊接有举升驱动电机10,举升驱动电机10的输出轴与主动链轮轴13通过驱动链条机械连接在一起;在主动链轮轴13的左端连接有左主动摆臂15,在主动链轮轴13的右端连接有右主动摆臂16,在从动链轮轴14的左端连接有左从动摆臂17,在从动链轮轴14的右端连接有右从动摆臂18,在左主动摆臂15的下端、右主动摆臂16的下端、左从动摆臂17的下端、右从动摆臂18的下端,均连接有一个滚轮23,在左主动摆臂15的下端与左从动摆臂17的下端之间,设置有左举升横梁19,在左举升横梁19的内侧立面上分别设置有左前长条状凹槽21和左后长条状凹槽22,左从动摆臂17下端的滚轮23设置在左前长条状凹槽21中,左主动摆臂15的下端的滚轮设置在左后长条状凹槽22中,在右主动摆臂16的下端与右从动摆臂18的下端之间设置有右举升横梁20;在穿梭车车体架2上设置有拆盘机龙门框架25,在拆盘机龙门框架25的下端设置有拆盘摆动叉26,在拆盘摆动叉26上设置有一摞空托盘4,一摞空托盘4设置在左举升横梁19和右举升横梁20的正上方;在左举升横梁19和右
举升横梁20的外侧的穿梭车车体架2上设置有拆盘后空盘传送机传送导轨8;举升驱动电机10同时控制主动链轮11和从动链轮12旋转一个角度,主动链轮轴13和从动链轮轴14同时带动四个摆臂向同一方向摆动,四个摆臂下端的滚轮在对应的长条状凹槽中移动,将左举升横梁19和右举升横梁20同步举起,拆盘摆动叉26向外摆开,一摞孔托盘下降一个高度,最下一个空托盘被放置到左举升横梁19和右举升横梁20上,拆盘摆动叉26向内摆回,将最下一个空托盘上的一摞空托盘托住,举升驱动电机10反向旋转,四个摆臂向同一方向摆回,左举升横梁19和右举升横梁20降下,将最下一个空托盘移载到拆盘后空盘传送机传送导轨8上,最下一个空托盘被传送到码垛系统中去装载货物。
16.成品链式输送机5上设置有成品托盘6,在成品托盘6上设置有码垛好的货物7;成品链式输送机5可在双工位拆盘穿梭车上的拆盘机工作的同时,进行码垛系统与堆垛机之间的成品货物的转载传送,大大提高了库前工作节奏。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1