一种智能柔性抓取装置的制作方法
1.本实用新型涉及玻璃屏幕制造技术领域,尤其涉及一种智能柔性抓取装置。
背景技术:
2.目前市上的手机、平板种类数不胜数,而屏幕生产商较少厂家为了节约成本,不得不让形状尺寸各不相同的屏幕共线生产,不同大小的屏幕在同一生产线上进行夹持时,夹持机构需要根据屏幕尺寸进行夹持距离的调整,从而进行与屏幕夹持时的适配,进行屏幕的夹持。
3.现有的玻璃屏幕非常脆弱,在进行抓取时,如果抓取机构太松会抓不上,太紧会抓碎玻璃,经常人工切换夹具又太费时间,使抓取效率降低,玻璃屏幕损坏性高,同时过大的夹爪打开增加夹爪行程,从而产生能量的过度消耗与浪费,不利于实际使用。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种智能柔性抓取装置。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种智能柔性抓取装置,包括工作台,送料传送带和出料传送带,所述工作台顶面四角焊接设有支撑柱,所述支撑柱顶面固定设有承重板,且承重板内部底面设有空腔,所述工作台一侧设有视觉相机,所述工作台另一侧设有取料装置,所述取料装置与视觉相机电性连接,所述取料装置包括平面电机和传动齿轮,所述平面电机的输出轴与承重板内部侧面固定,所述平面电机底部固定设有步进电机,所述步进电机的输出轴端部固定设有传动齿轮,所述传动齿轮两侧分别啮合设有第一夹爪和第二夹爪。
6.优选的,所述第一夹爪和第二夹爪顶面均固定设有第二电动伸缩杆,且第二电动伸缩杆竖直放置,所述第二电动伸缩杆顶端固定设有第一电动伸缩杆,所述第一电动伸缩杆远离第一电动伸缩杆的一端与步进电机侧面固定。
7.优选的,所述第一夹爪内壁与传动齿轮啮合,所述第二夹爪内壁与传动齿轮啮合,所述第一夹爪和第二夹爪沿传动齿轮中心位置中心对称,所述第一夹爪和第二夹爪俯视横截面均为l型,所述第一夹爪内壁靠近底面处固定设有防滑条,所述第二夹爪内壁靠近底面处固定设有防滑条。
8.优选的,所述视觉相机顶面固定设有u型承重件,所述u型承重件顶面与承重板内部顶面焊接,所述视觉相机的俯视方向水平中线与送料传送带俯视水平中线重合。
9.优选的,所述工作台顶面靠近正面一侧设有送料传送带,所述工作台顶面靠近背面一侧设有出料传送带,所述出料传送带顶面与送料传送带顶面位于同一平面。
10.优选的,所述送料传送带底部一侧设有第一光电传感器,所述送料传送带底部另一侧设有第二光电传感器,所述第二光电传感器与取料装置竖直方向对应,所述第一光电传感器与视觉相机竖直方向对应,所述第二光电传感器与取料装置电性连接,所述第一光
电传感器与视觉相机电性连接。
11.优选的,所述出料传送带顶面设有出料盒,所述出料盒内壁均涂覆设有硅胶涂层。
12.有益效果
13.本实用新型中,采用视觉相机对屏幕的宽度进行识别,传输数据至取料装置,取料装置通过步进电机驱动传动齿轮进行第一夹爪和第二夹爪的打开距离的控制,进行最小夹取宽度的调节,保准无损抓取,精准控制夹爪夹取的同时使夹爪开合距离最小化,节能增效。
附图说明
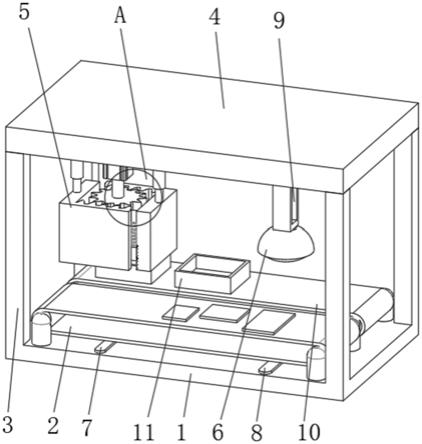
14.图1为一种智能柔性抓取装置的立体结构示意图;
15.图2为一种智能柔性抓取装置的正面剖视图;
16.图3为一种智能柔性抓取装置的侧视图;
17.图4为图1的a处放大图。
18.图例说明:
19.1、工作台;2、送料传送带;3、支撑柱;4、承重板;5、取料装置;501、平面电机;502、步进电机;503、传动齿轮;504、第一夹爪;505、第二夹爪;506、防滑条;507、第一电动伸缩杆;508、第二电动伸缩杆;6、视觉相机;7、第一光电传感器;8、第二光电传感器;9、u型承重件;10、出料传送带;11、出料盒。
具体实施方式
20.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例和附图,进一步阐述本实用新型,但下述实施例仅仅为本实用新型的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其它实施例,都属于本实用新型的保护范围。
21.下面结合附图描述本实用新型的具体实施例。
22.具体实施例:
23.参照图1-4,一种智能柔性抓取装置,包括工作台1,送料传送带2和出料传送带10,工作台1顶面四角焊接设有支撑柱3,支撑柱3顶面固定设有承重板4,且承重板4内部底面设有空腔,工作台1一侧设有视觉相机6,视觉相机6顶面固定设有u型承重件9,u型承重件9顶面与承重板4内部顶面焊接,视觉相机6的俯视方向水平中线与送料传送带2俯视水平中线重合,u型承重件9机械能视觉相机6的固定,保持视觉相机6的稳定性,使拍照识别更加精准,工作台1顶面靠近正面一侧设有送料传送带2,工作台1顶面靠近背面一侧设有出料传送带10,出料传送带10顶面与送料传送带2顶面位于同一平面,送料传送带2进行加工的屏幕传送,出料传送带10进行取料装置5夹持封装后的屏幕进行传送,送料传送带2底部一侧设有第一光电传感器7,送料传送带2底部另一侧设有第二光电传感器8,第二光电传感器8与取料装置5竖直方向对应,第一光电传感器7与视觉相机6竖直方向对应,第二光电传感器8与取料装置5电性连接,第一光电传感器7与视觉相机6电性连接,送料传送带2进行屏幕的夹取传送,屏幕经过第一光电传感器7时,第一光电传感器7感应屏幕后传输电信号至视觉相机6,视觉相机6进行屏幕的抓取拍照,进行屏幕宽度的数据识别,拍照识别后的视觉相机
6传输数据至取料装置5,取料装置5根据宽度数据调整尺寸准备夹取,待第二光电传感器8感应送料传送带2传送的屏幕时,发送电信号至取料装置5,取料装置5进行屏幕的夹取,夹取后的屏幕在取料装置5的位移下放置于出料传送带10表面,出料传送带10顶面设有出料盒11,出料盒11内壁均涂覆设有硅胶涂层,出料盒11进行取料装置5夹取后的屏幕进行放置,出料盒11内壁的硅胶涂层对放置时的屏幕进行缓冲防滑的作用,防止屏幕放置时碎裂,工作台1另一侧设有取料装置5,取料装置5与视觉相机6电性连接,取料装置5包括平面电机501和传动齿轮503,平面电机501的输出轴与承重板4内部侧面固定,平面电机501底部固定设有步进电机502,步进电机502的输出轴端部固定设有传动齿轮503,传动齿轮503两侧分别啮合设有第一夹爪504和第二夹爪505,第一夹爪504内壁与传动齿轮503啮合,第二夹爪505内壁与传动齿轮503啮合,第一夹爪504和第二夹爪505沿传动齿轮503中心位置中心对称,第一夹爪504和第二夹爪505俯视横截面均为l型,取料装置5接收视觉相机6的传输数据后,进行第一夹爪504和第二夹爪505宽度的调节,平面电机501根据输出轴的收缩进行移动,使取料装置5移动至送料传送带2表面竖直正上方,步进电机502正向旋转,带动传动齿轮503转动,第一夹爪504与第二夹爪505与传动齿轮503进行啮合传动分离,屏幕宽度为x,第一夹爪504和第二夹爪505打开的距离为x+n,n为最小开合距离,第一夹爪504和第二夹爪505顶面均固定设有第二电动伸缩杆508,且第二电动伸缩杆508竖直放置,第二电动伸缩杆508顶端固定设有第一电动伸缩杆507,第一电动伸缩杆507远离第一电动伸缩杆507的一端与步进电机502侧面固定,第一电动伸缩杆507与步进电机502电性连接,步进电机502正向旋转打开夹爪时,第一电动伸缩杆507同步缩短,步进电机502反向关闭夹爪距离时,第一电动伸缩杆507同步伸长,进行距离的适配,尺寸调整后,第二电动伸缩杆508伸长,使第一夹爪504和第二夹渣下移至于送料传送带2表面相抵,步进电机502反向旋转,传动齿轮503反向传动至第一夹爪504和第二夹爪505之间间距为x,进行屏幕的夹持,第二电动伸缩杆508收缩,平面电机501输出轴收缩,进行夹持后屏幕的移动,传动齿轮503底面与送料传动带之间的距离小于传动齿轮503顶面与第一夹爪504顶面的距离,采用视觉相机6对屏幕的宽度进行识别,传输数据至取料装置5,取料装置5通过步进电机502驱动传动齿轮503进行第一夹爪504和第二夹爪505的打开距离的控制,进行最小夹取宽度的调节,保准无损抓取,精准控制夹爪夹取的同时使夹爪开合距离最小化,节能增效,第一夹爪504内壁靠近底面处固定设有防滑条506,第二夹爪505内壁靠近底面处固定设有防滑条506,保证夹持的稳定性,防止屏幕脱落。
24.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
25.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用
新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1