一种自动分离下料机构的制作方法
1.本实用新型涉及下料机构技术领域,尤其涉及一种自动分离下料机构。
背景技术:
2.铆银点机即是现有技术中的铆合机,铆合机是依据冷辗原理研制而成的一种新型铆接设备,就是指能用铆钉把物品铆接起来机械装备,该设备结构紧凑、性能稳定、操作方便安全。通常在铆银点后,需要对铆接后的工件进行检测,检测其是否符合铆接质量。现有的铆银点机上设置有两个下料工位,其中一个下料工位用于抓取合格工件,另一所述下料工位用于抓取不合格工件,依据检测机构获取的检测信号将该工件输送至对应的下料工位上,然而上述设置使得工件经过的工位多,影响工作效率。
技术实现要素:
3.本实用新型意在提供一种自动分离下料机构,其具有能够在一个工位上分离合格或者不合格的工件,工作效率高的特点。
4.为达到上述目的,本实用新型的基本方案如下:
5.一种自动分离下料机构,包括安装架,所述安装架上设置有抓取组件、移动组件和分离组件,
6.所述抓取组件用于抓取夹持工装上的工件,
7.所述移动组件用于驱动抓取组件移动以将工件输送至分离组件,
8.所述分离组件包括滑轨、分离驱动件、第一集料盒和第二集料盒,所述第一集料盒用于收集其中一种检测状态的工件,所述第二集料盒用于另一检测状态的工件,所述滑轨用于将工件导向第一集料盒内,所述分离驱动件与安装架固定连接,所述分离驱动件用于驱动滑轨移动以使工件落入第二集料盒内。
9.进一步地,所述抓取组件包括夹爪气缸和两个相对设置的夹持块,所述夹爪气缸用于驱动两个夹持块相互靠近或相互远离。
10.进一步地,两个所述夹持块相互靠近的表面上均开设有夹持槽,所述夹持槽用于容纳工件进入。
11.进一步地,两个所述夹持块上均设置有用于与夹持工装相适配的避让槽,所述避让槽将夹持块划分为若干个夹持部。
12.进一步地,所述移动组件包括第一相互垂直设置的第一导轨和第二导轨,所述第一导轨上滑动连接有第一滑块,所述夹爪气缸与第一滑块固定连接,所述第一导轨上设置有用于驱动第一滑块沿第一导轨滑动的第一驱动件,所述第二导轨上滑动连接有第二滑块,所述第二滑块与第一导轨固定连接,所述第二导轨上设置有用于驱动第二滑块沿第二导轨滑动的第二驱动件。
13.进一步地,所述分离驱动件设置为双导杆气缸,所述双导杆气缸的输出端水平设置且与滑轨固定连接。
14.进一步地,所述滑轨的两侧分别设置有限位部。
15.与现有技术相比本方案的有益效果是:
16.1、设置的分离组件中,利用分离驱动件驱动滑轨移动,从而改变工件的移动方向,进而使得同类的工件被分拣到同一集料盒中,在同一工位上实现两种不同检测状态的工件下料,且整个加工过程流经的工位总数少,工作效率高;
17.2、在同一个工位上完成分拣过程,减少了整个铆合机上设置的工位数量,从而使得铆合机上的结构紧凑,减少了铆合机整体的体积。
附图说明
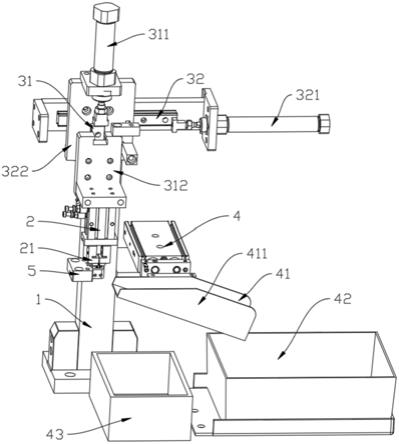
18.图1为本实施例的整体结构示意图;
19.图2为实施例中两个夹持块的结构示意图。
20.说明书附图中的附图标记包括:
21.1、安装架;2、夹爪气缸;21、夹持块;211、夹持槽;212、避让槽;31、第一导轨;311、第一驱动件;312、第一滑块;32、第二导轨;321、第二驱动件;322、第二滑块;4、双导杆气缸;41、滑轨;411、限位部;42、第一集料盒;43、第二集料盒;5、夹持工装。
具体实施方式
22.下面结合说明书附图,并通过具体实施方式对本实用新型作进一步详细的说明:
23.实施例:
24.一种自动分离下料机构,如图1所示,包括安装架1,安装架1上设置有抓取组件、移动组件和分离组件,抓取组件用于抓取夹持工装5上的工件,移动组件用于驱动抓取组件移动以将工件输送至分离组件,分离组件包括滑轨41、分离驱动件、第一集料盒42和第二集料盒43,第二集料盒43设置于第一集料盒42和夹持工装5之间。第一集料盒42用于收集其中一种检测状态的工件,第二集料盒43用于另一检测状态的工件,滑轨41用于将工件导向第一集料盒42内,滑轨41的两侧分别设置有限位部411。分离驱动件依据检测机构的检测信号驱动滑轨41移动以使工件落入第二集料盒43内。分离驱动件设置为双导杆气缸4,双导杆气缸4的输出端水平设置且与滑轨41固定连接。双导杆气缸4,又叫双联气缸,是将两个单杆薄型气缸并联在一起,两个活塞出杆,双轴气缸属于高精度气缸,具有一定的抗弯曲抗扭转性能,能承受一定的侧向负载,多应用与对精度要求较高的场合。当工件落在滑轨41上时,分离驱动件需要承载一定的扭矩与侧向载荷,相比于单个导杆的气缸,双导杆气缸4的承载能力更强。
25.移动组件包括相互垂直设置的第一导轨31和第二导轨32,第二导轨32与安装座固定连接,且第二导轨32的长度方向水平设置且沿夹持工装5到第一集料盒42的方向延伸,第二导轨32上滑动连接有第二滑块322,第二导轨32上设置有用于驱动第二滑块322沿第二导轨32滑动的第二驱动件321。第二滑块322与第一导轨31固定连接,且第一导轨31的长度方向竖直设置,第一导轨31上滑动连接有第一滑块312,夹爪气缸2与第一滑块312固定连接,第一导轨31上设置有用于驱动第一滑块312沿第一导轨31滑动的第一驱动件311,其中第一驱动件311和第二驱动件321均设置为气缸。其中第一滑块312和第二滑块322的移动路径是预设的,每次对工件进行夹持和输送时其移动路径相同。当夹持块21位于最靠近第一集料
盒42的位置时,且双导杆气缸4位于自然状态下时,夹持块21、滑轨41和第一集料盒42位于同一竖直区域内。
26.如图2所示,抓取组件包括夹爪气缸2和两个相对设置的夹持块21,夹爪气缸2用于驱动两个夹持块21相互靠近或相互远离。两个夹持块21相互靠近的表面上均开设有夹持槽211,夹持槽211用于容纳工件进入。两个夹持块21上均设置有用于与夹持工装5相适配的避让槽212,避让槽212将夹持块21划分为若干个夹持部。
27.本方案具体实施方式如下:
28.使用时,分离驱动组件依据检测机构的检测信号驱动滑轨41移动,当在检测机构检测到该工件为不合格品时,双导杆气缸4驱动滑轨41移动,使得滑轨41与夹持块21错开。第二驱动件321驱动第二滑块322沿第二导轨32的长度方向靠近夹持工装5,第二滑块322带动第一导轨31、第一滑块312和夹持块21同步靠近夹持工装5,当夹持块21移动至位于夹持工装5的正上方后,第一驱动件311驱动第一滑块312沿第一导轨31的长度方向向下靠近夹持工装5,第一滑块312带动夹持块21向下靠近物料,夹持工装5上的限位条插入夹持块21上的避让槽212内,此时两个夹持块21之间处于相互远离的状态。夹爪启动带动两个夹持块21相互靠近,夹持工装5上的工件进入两个夹持块21上的夹持槽211内,使得工件被夹持于夹持块21之间。而后第一驱动件311驱动第一滑块312向上滑动以使得第一滑块312远离夹持工装5,第一滑块312带动第二导轨32和夹持块21向上远离夹持工装5,从而带物料脱离夹持工装5,第二驱动件321驱动第二滑块322靠近第二集料盒43,第二滑块322带动第一导轨31、第一滑块312和夹持块21靠近第二集料盒43。当夹持块21移动至第二集料盒43的正上方后,夹爪气缸2驱动两个夹持块21相互远离,工件脱离夹持块21落入第二集料盒43内,而后双导杆气缸4驱动滑轨41复位。
29.如若检测机构检测到该工件为合格品时,利用移动组件和抓取组件移动并抓取工件,移动和抓取的过程与上相同,不同的是,当夹持块21移动至第二集料盒43的正上方时,夹持块21位于滑轨41的正上方,夹爪气缸2驱动两个夹持块21相互远离,使得工件脱离夹持块21并经滑轨41的导向后落入第一集料盒42内。
30.另外在本方案中也可将第一集料盒42用于收集不合格的工件,第二集料盒43用于收集合格的工件。
31.以上所述的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1