一种自动助力装置的制作方法
1.本实用新型涉及自动化控制技术领域,尤其涉及一种自动助力装置。
背景技术:
2.助力机构,应用于装配线工作时重物的提升与降低。目前已有的助力装置为通过按钮或遥控控制,操作手柄上有控制上升与下降的按钮,挂钩挂住重物后可通过按钮操控助力装置将重物吊起,运输到指定位置后放下。尽管已经通过电机吊起重物,但在较重的物料牵引过程中,人工操作还是需要耗费一定体力。
3.目前设备在使用过程中需全程通过按钮控制高度,操作比较麻烦;在运输较重的物料时,仍需要耗费较多体力。
4.例如,中国专利cn201920269344.0公开了物流自动化吊装装置。在运输带上运输,运输至挂钩处,升降电机下降,挂钩挂住货物,升降电机再提升,将货物提升所需放置到货架的位置,之后辅助推动电机将货物右推至货架上,并且底块可转动从而调整挂钩的位置,操作方便,适用于需要吊装的货物;但是该吊装装置无法实现自动化运行,仍然需要人工耗费一定的体力进行调整。
技术实现要素:
5.本实用新型主要解决现有的技术中助力装置无法进行自动化工作的问题;提供一种自动助力装置。
6.本实用新型的上述技术问题主要是通过下述技术方案得以解决的:一种自动助力装置,包括壳体、动力装置、检测部、承重部和急停部,所述动力装置安装在壳体内,提供重物上升的拉力,所述检测部与动力装置连接,用于检测重物的运动状态并根据内部第一压力传感器检测的压力值进行重物的上升、下降或停机控制,所述承重部与动力装置连接,所述急停部安装在动力装置上,通过第二压力传感器检测的压力值判断重物是否超出承载限值,若超出承载限值,则通过pid调节使动力装置锁死,与动力装置连接。通过检测部进行智能检测,判断重物是否挂上,并进行重物上升和下放的自动控制,实现助力装置的自动化工作,减少人工的体力,提高工作效率。
7.作为优选,所述的动力装置包括减速电机、轴承、轴承底座、绕线盘和牵引绳,所述减速电机固定安装在壳体内,所述减速电机的控制端与检测部连接,所述轴承与减速电机的输出轴连接,所述轴承安装在轴承底座上,所述轴承底座与壳体固定连接,所述绕线盘与轴承连接,所述牵引绳的一端绕在绕线盘上,所述牵引绳的另一端经检测部与承重部固定连接。采用减速电机、绕线盘和牵引绳的方式进行重物的提升或下放,更加灵活方便,安全性更好。
8.作为优选,所述的检测部包括基体、控制单元、第一压力传感器和操作握把,所述基体固定安装在牵引绳上,所述操作握把固定连接在基体下端,所述第一压力传感器安装在操作握把内,用于检测操作握把的压力信息,所述第一压力传感器与控制单元连接,所述
控制单元设置在基体内,所述控制单元设置有pid调节模块、第一波形信号表、第二波形信号表、第三波形信号表、第一压力阈值和第二压力阈值,所述第一波形信号表用于判断重物是否与地面接触,所述第二波形信号表用于判断重物是否发生碰撞,发生地面接触或碰撞时通过pid调节模块控制动力装置停机,所述第三波形信号表用于进行重物上升或下放的控制判断,当所述第一压力传感器传递的压力值大于第一压力阈值时,通过pid调节模块控制动力装置带动重物下放,当所述第一压力传感器传递的压力值小于第二压力阈值时,通过pid调节模块控制动力装置带动重物上升。本实用新型涉及的阈值判断以及波形信号对比均为简单的阈值大小比较或波形重合度比较,不涉及复杂方法的改进,重物与地面正常接触时,信号波形为线性、时间长且持续,重物与地面发送碰撞时,信号波形为脉冲型、时间短、力度大,人工操作用手握住操作握把时,信号波形为柔性、时间长且持续,根据三种信号波形表的不同判断重物的运动状态以及进行相应的控制,安全性更好。
9.作为优选,还包括操作按钮和指示灯,所述操作按钮和指示灯均设置在基体上,所述操作按钮和指示灯均与控制单元连接。通过按钮和指示灯进行操作和操作指示,更加灵活和安全。
10.作为优选,所述的承重部为弯月型的挂钩。弯月型的挂钩能更好的勾住重物,防止重物掉落。
11.作为优选,所述的牵引绳为钢丝绳。钢丝绳进行牵引提供更好的安全性。
12.作为优选,所述的急停部包括法兰盘、压片和第二压力传感器,所述法兰盘设置在减速电机和绕线盘之间,所述压片与法兰盘连接,所述第二压力传感器设置在压力的下端,所述第二压力传感器用于检测重物的重量信息,所述第二压力传感器与检测部连接。当重物下降过程中或重物放入挂钩过重导致第二压力传感器被压断或变形时,压片下压使法兰盘锁死绕线盘,同时,减速电机被锁死,使得重物无法继续下降,提高安全性。
13.作为优选,所述的操作按钮包括启动按钮、自动模式按钮和夹具按钮。
14.本实用新型的有益效果是:通过控制单元和第一压力传感器配合,实现助力装置的智能控制,根据操作者施加力的方向及大小自行判断重物进行上升或下放;可以实现自动控制及遥控控制两种控制方式;通过第二压力传感器自动检测重物是否挂上并将重量信息传递给控制单元,在故障时进行锁死,悬停更加稳定,安全性更高。
附图说明
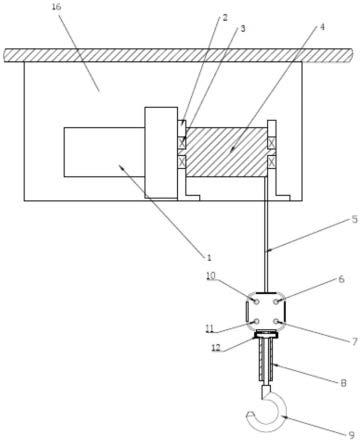
15.图1是本实用新型实施例的自动助力装置的正视图。
16.图2是本实用新型实施例的自动助力装置的侧视图。
17.图中1、减速电机,2、轴承支撑座,3、轴承,4、绕线盘,5、钢丝绳,6、指示灯,7、自动模式按钮,8、操作握把,9、挂钩,10、启动按钮,11、夹具按钮,12、第一压力传感器,13、法兰盘,14、压片,15、第二压力传感器,16、钣金盒。
具体实施方式
18.下面通过实施例,并结合附图,对本实用新型的技术方案作进一步具体的说明。
19.实施例:一种自动助力装置,如图1和图2所示,包括钣金盒16,起到支撑和保护作用,动力装置,提供重物上升的拉力;承重部,用于挂接重物,与动力装置连接;检测部,用于
检测重物的运动状态并根据内部第一压力传感器检测的压力值进行重物的上升、下降或停机控制,位于动力装置与承重部之间;急停部,通过第二压力传感器检测的压力值判断重物是否超出承载限值,若超出承载限值,则通过pid调节使动力装置锁死,安装在动力装置内。
20.动力装置包括减速电机1,根据检测部的指令进行开启或关闭,提供动力;绕线盘4,通过滚动对牵引绳进行收线或放线,与减速电机连接;牵引绳,一端绕在绕线盘上,另一端经检测部与承重部固定连接,在绕线盘与减速电机之间还设置有轴承3和轴承底座2,减速电机的输出轴通过轴承与绕线盘连接,轴承安装在轴承底座上,轴承底座的底端固定安装在钣金盒的底部,减速电机固定安装在钣金盒的底部。
21.检测部包括基体、控制单元、第一压力传感器12、操作握把8、操作按钮和指示灯6,基体固定安装在牵引绳上,操作握把固定连接在基体下端,第一压力传感器安装在操作握把内,用于检测操作握把的压力信息,第一压力传感器与控制单元连接,控制单元设置在基体内,控制单元设置有pid调节模块、第一波形信号表、第二波形信号表、第三波形信号表、第一压力阈值和第二压力阈值,第一波形信号表用于判断重物是否与地面接触,第二波形信号表用于判断重物是否发生碰撞,发生地面接触或碰撞时通过pid调节模块控制动力装置停机,第三波形信号表用于进行重物上升或下放的控制判断,当第一压力传感器传递的压力值大于第一压力阈值时,通过pid调节模块控制动力装置带动重物下放,当第一压力传感器传递的压力值小于第二压力阈值时,通过pid调节模块控制动力装置带动重物上升,操作按钮和指示灯均设置在基体上,操作按钮和指示灯均与控制单元连接,减速电机的控制端与控制单元连接。重物与地面正常接触时,信号波形为线性、时间长且持续,作为第一波形信号表,重物与地面发送碰撞时,信号波形为脉冲型、时间短、力度大,作为第二波形信号表,人工操作用手握住操作握把时,信号波形为柔性、时间长且持续,作为第三波形信号表,根据三种信号波形表的不同判断重物的运动状态以及进行相应的控制。
22.承重部为弯月型的挂钩9,牵引绳为钢丝绳5,操作按钮包括启动按钮10、自动模式按钮7和夹具按钮11,通过按下夹具按钮使挂钩夹紧重物。
23.急停部包括法兰盘13、压片14和第二压力传感器15,法兰盘设置在减速电机和绕线盘之间,压片与法兰盘连接,第二压力传感器设置在压力的下端,第二压力传感器用于检测重物的重量信息,第二压力传感器与检测部连接。当重物下降过程中或重物放入挂钩过重导致第二压力传感器被压断或变形时,压片下压使法兰盘锁死绕线盘,同时,减速电机被锁死,使得重物无法继续下降。
24.钣金盒整体吊装于操作空间顶部。使用时,按下启动按钮,装置启动,指示灯常亮。将地面上的重物挂在挂钩上。在遥控模式下则可通过遥控控制重物的升降;按下自动模式按钮则可实现重物的智能助力提升功能。第一压力传感器与钢丝绳相连,置于操作握把内,第一压力传感器与操作握把之间无其他连接。在自动模式下,操作者手握操作握把,当操作者提升重物,第一压力传感器检测到的力值减小,则减速电机带动绕线盘收紧线缆,将重物稳定提升;当操作者向下拉重物时,第一压力传感器检测到的力值增大,则减速电机带动绕线盘放松线缆,重物稳定下降。钣金盒内压片与法兰盘相连,压片压于第二压力传感器上。悬挂不同种类的重物时压片对第二压力传感器的压力存在差值,第二压力传感器主要用于测量所提升物体的重量。当重物超重导致第二压力传感器变形或断裂时,法兰盘接触到钣金盒内壁,减速电机壳体不再旋转,锁死绕线盘,避免因第二传感器断裂失去支撑导致重物
迅速下降,大大提高了装置安全性。重物可稳定悬停于指定高度,当重物落地时,可以通过力的突变传递的信号波形判断重物已落地,减速电机停止工作。
25.本实用新型涉及的阈值判断以及波形信号对比均为简单的阈值大小比较或波形重合度比较,不涉及复杂方法的改进。
26.以上所述的实施例只是本实用新型的一种较佳的方案,并非对本实用新型作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1