感应式防掉落泡棉吸盘机构的制作方法
1.本实用新型涉及一种吸盘机构,具体涉及一种感应式防掉落泡棉吸盘机构。
背景技术:
2.泡棉是塑料粒子发泡过的材料,简称泡棉。泡棉分为pu泡棉,防静电泡棉,导电泡棉,epe,防静电epe等,泡棉具有有弹性、重量轻、快速压敏固定、使用方便、弯曲自如、体积超薄、性能可靠等一系列特点。
3.在新能源汽车的生产制造过程中,需要在电池的电芯之间放置泡棉,起到缓冲减振、绝缘的效果。
4.泡棉的贴附操作,通常使用吸盘机构来进行操作。但是,现有的泡棉吸持机构,对泡棉的吸持力较弱,容易在转移过程中发生泡棉掉落的现象,并且现有的泡棉吸持机构并无感应泡棉的能力,因此在取料时无法判定是否吸取了泡棉,并且在转移图中是否发生泡棉掉落。
技术实现要素:
5.本实用新型的目的是:
6.设计一种感应式防掉落泡棉吸盘机构,对吸持结构进行改进,避免因局部吸持力不足导致泡棉掉落的不良现象,同时具备对泡棉的感应能力。
7.为了实现上述目的,本实用新型提供如下的技术方案:
8.一种感应式防掉落泡棉吸盘机构,包括基准板、升降板、气室板、气缸、探杆以及接近开关;所述基准板上设置有连接座,所述升降板通过弹簧导杆与基准板底端活动连接,所述气室板位于升降板底端;所述气室板内设置有内气室和外气室,所述气室板底端设置有抽气孔;所述升降板侧面设置有第一气管接头和第二气管接头;所述气缸通过固定架与升降板连接,所述气缸的活塞杆上设置有升降座,所述探杆位于升降座上套筒内,所述探杆竖向贯穿升降板与气室板的通孔,所述接近开关与探杆顶端的位置相对应。
9.进一步的,所述连接座的顶端和底端均设置有法兰,所述连接座与基准板中部垂直连接;所述升降板与基准板相平行。
10.进一步的,所述弹簧导杆与升降板的四角处连接;所述内气室位于外气室的内侧,所述外气室呈回字形。
11.进一步的,所述抽气孔呈行列状排布在气室板的底端面,所述内气室和外气室均与对应的抽气孔连通。
12.进一步的,所述第一气管接头通过升降板内的孔路与外气室连通;所述第二气管接头通过升降板内的另一孔路与内气室连通。
13.进一步的,所述气缸竖向布置,所述探杆呈细长杆状,所述探杆的外径与套筒的内径呈间隙配合。
14.进一步的,所述套筒位于升降座上,所述接近开关通过固定板与升降座顶端连接,
所述接近开关的检测端正对探杆顶部上方。
15.本实用新型的有益效果为:一种感应式防掉落泡棉吸盘机构,结合基准板、弹簧导杆、升降板、气室板、气缸、探杆以及接近开关的配合使用,对吸持结构进行改进,实用内气室和外气室形成内层和外周的独立吸持,避免因局部吸持力不足导致泡棉掉落的不良现象,同时探杆和接近开关配合使用,具备对泡棉的感应能力,可在取料时感应泡棉有无,在转移时感应泡面是否掉落。
附图说明
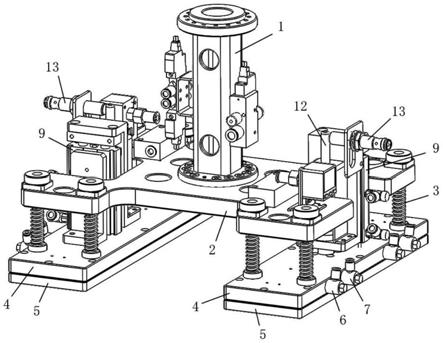
16.图1为本实用新型一种感应式防掉落泡棉吸盘机构的整体结构示意图。
17.图2为图1所示结构的侧下视角示意图。
18.图3为本实用新型一种感应式防掉落泡棉吸盘机构的部分结构示意图。
19.图4为本实用新型一种感应式防掉落泡棉吸盘机构的气室板的结构示意图。
20.图中:1、连接座;2、基准板;3、弹簧导杆;4、升降板;5、气室板;51、内气室;52、外气室;53、抽气孔;6、第一气管接头;7、第二气管接头;8、固定架;9、气缸;10、升降座;11、套筒;12、探杆;13、接近开关。
具体实施方式
21.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型作进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
22.参考图1至图4,一种感应式防掉落泡棉吸盘机构,包括基准板2、升降板4、气室板5、气缸9、探杆12以及接近开关13;所述基准板2上设置有连接座1,连接座1用于与机械手臂机器人连接,所述升降板4通过弹簧导杆3与基准板2底端活动连接,弹簧导杆3具有弹性,用于对升降板4起导向作用,所述气室板5位于升降板4底端;所述气室板5内设置有内气室51和外气室52,所述气室板5底端设置有抽气孔53,抽气孔53用于对泡棉形成抽吸;所述升降板4侧面设置有第一气管接头6和第二气管接头7,第一气管接头6和第二气管接头7均通过气管与外部气泵连接;所述气缸9通过固定架8与升降板4连接,所述气缸9的活塞杆上设置有升降座10,所述所述气缸9用于驱动升降座10上下升降移动,所述探杆12位于升降座10上套筒11内,所述探杆12竖向贯穿升降板4与气室板5的通孔,探杆12用于抵紧泡棉的顶端面,用于检测泡棉的有无以及是否掉落,所述接近开关13与探杆12顶端的位置相对应,接近开关13用于检测探杆12的位置。
23.所述连接座1的顶端和底端均设置有法兰,方便与机械手臂机器人连接,所述连接座1与基准板2中部垂直连接;所述升降板4与基准板2相平行。
24.所述弹簧导杆3与升降板4的四角处连接;所述内气室51位于外气室52的内侧,可对泡棉形成中部区域的抽吸,所述外气室52呈回字形,可对泡棉形成边缘区域回字形抽吸。
25.所述抽气孔53呈行列状排布在气室板5的底端面,所述内气室51和外气室52均与对应的抽气孔53连通,相互之间的抽吸完全独立,之间不产生任何干涉。
26.所述第一气管接头6通过升降板4内的孔路与外气室52连通;所述第二气管接头7通过升降板4内的另一孔路与内气室51连通。
27.所述气缸9竖向布置,所述探杆12呈细长杆状,所述探杆12的外径与套筒11的内径呈间隙配合,探杆12可在套筒11内上下升降移动,探杆12的初始位置为套筒11的低位。
28.所述套筒11位于升降座10上,所述接近开关13通过固定板与升降座10顶端连接,所述接近开关13的检测端正对探杆12顶部上方,接近开关13检测探杆12的升降位置和动作。
29.本实用新型的工作原理为:首先将连接座与机械手臂机器人连接,当需要取料时,机械手臂机器人驱动吸盘机构到达泡棉上方,并下移,探杆12首先接触到泡棉顶端面,并且探杆12相对于套筒11向上移动,直至被接近开关13检测到,此时外部气泵抽气,气室板5的内气室51和外气室52均产生负压,分别通过抽气孔对泡棉形成抽吸;内气室51对应的抽气孔可对泡棉形成中部的吸紧,外气室52对应的抽气孔和对泡棉的外周形成回字形的吸紧,两个吸紧的区域相互独立,因此避免因局部吸持力不足导致泡棉掉落的不良现象;在吸持取料后的转移过程中,探杆12可持续对泡棉形成感应,如若泡棉发生掉落,则探杆12在重力作用下会沿套筒11下滑,接近开关13可检测到探杆12下移,从而可以检测出泡棉掉落。
30.泡棉具有一定的厚度;在取料时,机械手臂机器人驱动吸盘机构下移指定距离,如探杆12仍未发生移动,则表明取料位置无泡棉。
31.上述实施例用于对本实用新型作进一步的说明,但并不将本实用新型局限于这些具体实施方式。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应理解为在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1