一种与无动力滚筒对接实现自动转运的穿梭小车的制作方法
1.本实用新型涉及自动化相关技术领域,具体为一种与无动力滚筒对接实现自动转运的穿梭小车。
背景技术:
2.随着我国经济的迅速增长,推动了工业自动化的进程,企业对自动化作业要求也在不断提升,这就要求产品的自动化转运程度的提高,以满足企业节省人力,提高工作效率的目的。
3.传统的工厂中货物的转运总是耗费大量的人力物力、效率低、事故多发且劳动强度大,再加之人工成本的上升等都成了亟待解决的问题,因此我们需要一种与无动力滚筒对接实现自动转运的穿梭小车。
技术实现要素:
4.本实用新型的目的在于提供一种与无动力滚筒对接实现自动转运的穿梭小车,以解决上述背景技术中提出的目前传统的工厂中货物的转运总是耗费大量的人力物力、效率低、事故多发且劳动强度大,再加之人工成本的上升等都成了亟待解决的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种与无动力滚筒对接实现自动转运的穿梭小车,包括导轨组件,所述导轨组件包括安装架和轨道,所述安装架的顶端安装有轨道,所述轨道的中间开设有走线槽,所述轨道的顶端安装有电器通讯组件,所述轨道的顶端设置有行驶组件,所述行驶组件包括底架、安装壳体、警示灯组件、伺服电机、减速器、第一滚子链轮、驱动轴组件、主动轮、从动轮和第一滚子链本体,所述轨道的顶端安装有底架,所述底架的顶端两侧均设置有安装壳体,所述安装壳体的顶端均安装有警示灯组件,所述底架的顶端安装有伺服电机,所述伺服电机与减速器相连接,所述减速器的一侧安装有第一滚子链轮,所述第一滚子链轮通过第一滚子链本体与驱动轴组件相连接,所述底架的顶端分别安装有主动轮和从动轮,所述底架的顶端安装有输送组件。
6.优选的,所述输送组件包括减速电机、第二滚子链轮、第二滚子链本体和输送模块,所述底架的顶端安装有减速电机,所述减速电机的输出端固定连接有第二滚子链轮,所述第二滚子链轮通过第二滚子链本体与输送模块相连接。
7.优选的,所述底架的顶端安装有对接机构,所述对接机构包括液压站、拖链和油缸动力对接组件,所述底架的顶端一侧安装有液压站,所述底架的顶端另一侧安装有拖链,所述底架的顶端安装有油缸动力对接组件。
8.优选的,所述油缸动力对接组件包括固定组件、伸缩机构支架、驱动电机、摆动对接组件和张力组件,所述底架的顶端通过固定组件安装有伸缩机构支架,所述伸缩机构支架的底端安装有驱动电机,所述伸缩机构支架的顶端两侧均安装有摆动对接组件,所述伸缩机构支架的顶端安装有张力组件。
9.优选的,所述伸缩机构支架的底端安装有滑轨滑块组件,所述伸缩机构支架的底
端一侧安装有油缸缓冲组件,所述油缸缓冲组件的外侧壁安装有液压油缸,所述液压油缸安装在滑轨滑块组件的外侧壁,所述伸缩机构支架的底端安装有导向辅助机构。
10.优选的,所述底架的顶端安装有激光测距装置,且激光测距装置设置在安装壳体的外侧壁,所述油缸动力对接组件与对位模块相连接。
11.优选的,所述底架的前后两侧均安装有安全触边装置。
12.与现有技术相比,本实用新型的有益效果是:
13.1、该与无动力滚筒对接实现自动转运的穿梭小车,通过穿梭车与工位模块的对接转运使器身装配产品不动的地摊式生产模式改变为流动的自动化生产模式,该自动化生产模式下可以将装配工序细化,流程明确,节拍时间紧凑,使工人定位限时进行装配作业。
14.2、该与无动力滚筒对接实现自动转运的穿梭小车,工位采用非字形流水线模式,每道工序依据装配时间设多工位,弥补每个工序作业时间的巨大差异,在保持现有人员不变的前提下综合配置效率提高。
15.3、该与无动力滚筒对接实现自动转运的穿梭小车,具有更高的安全性。穿梭小车承载器身在各工位间自动转运,各工位操作员按下按钮自动完成进料出料,操作便捷,生产线各工位模块的操作按钮盒上均有一个急停按钮;主控柜上设置有急停按钮,任一个急停按钮按下,穿梭小车停止工作;出现故障而断电重启时,穿梭车伸出的对接机构重启时会自动缩回,保证运行安全可靠。
16.4、该与无动力滚筒对接实现自动转运的穿梭小车,穿梭小车结构合理性更。小车结构紧凑,重心低、行驶平稳、通过矩形方管与钢板的组合焊接使承载力增强最多载重8000kg ,行走速度0-60 m/min,通过车轮的导向装置极大地降低了车轮与轻轨之间摩擦产生的噪音。
17.5、该与无动力滚筒对接实现自动转运的穿梭小车,可以有效的节约成本,通过穿梭小车的对接机构,与工位模块通过齿轮啮合的方式实现动力传输,保证托盘与器身的转运,这样工位模块不再需要驱动机构,极大地降低了生产成本,也解决了穿梭小车输送机构与工位模块输送不同步的问题。
18.6、该与无动力滚筒对接实现自动转运的穿梭小车,应用灵活性更强。小车使用激光测距定位系统,小车的定位精度高,并根据实际生产的转运位置需求,可以对小车进行对接坐标的修改。
附图说明
19.图1为本实用新型正视结构示意图;
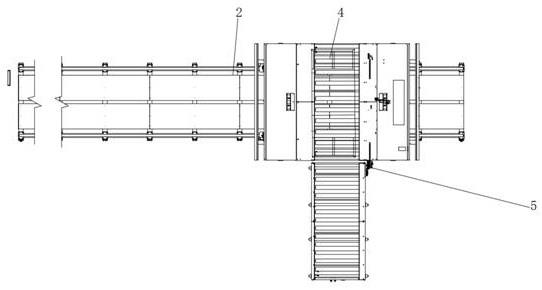
20.图2为本实用新型内部俯视结构示意图;
21.图3为本实用新型行驶组件第一视角零件结构示意图;
22.图4为本实用新型行驶组件第二视角零件结构示意图;
23.图5为本实用新型行驶组件、输送组件和对接机构组合零件结构示意图;
24.图6为本实用图5中的a部放大零件结构示意图;
25.图7为本实用新型油缸动力对接组件第一视角零件结构示意图;
26.图8为本实用新型油缸动力对接组件第二视角零件结构示意图。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.请参阅图1、图2所示,本实用新型提供一种技术方案:一种与无动力滚筒对接实现自动转运的穿梭小车,包括导轨组件1,导轨组件1包括安装架101和轨道102,安装架101的顶端安装有轨道102,轨道102的中间开设有走线槽,轨道102的顶端安装有电器通讯组件2,轨道102的顶端设置有行驶组件3,参阅图3、图4、图5所示,行驶组件3包括底架301、安装壳体302、警示灯组件303、伺服电机304、减速器305、第一滚子链轮306、驱动轴组件307、主动轮308、从动轮309和第一滚子链本体310,轨道102的顶端安装有底架301,底架301的顶端两侧均设置有安装壳体302,安装壳体302的顶端均安装有警示灯组件303,底架301的顶端安装有伺服电机304,伺服电机304与减速器305相连接,减速器305的一侧安装有第一滚子链轮306,第一滚子链轮306通过第一滚子链本体310与驱动轴组件307相连接,底架301的顶端分别安装有主动轮308和从动轮309,底架301的顶端安装有输送组件4。
29.在一实施例中,参阅图6所示,输送组件4包括减速电机401、第二滚子链轮402、第二滚子链本体403和输送模块404,底架301的顶端安装有减速电机401,减速电机401的输出端固定连接有第二滚子链轮402,第二滚子链轮402通过第二滚子链本体403与输送模块404相连接。
30.在另一实施例中,参阅图2、图5所示,底架301的顶端安装有对接机构5,对接机构5包括液压站501、拖链502和油缸动力对接组件6,底架301的顶端一侧安装有液压站501,底架301的顶端另一侧安装有拖链502,底架301的顶端安装有油缸动力对接组件6。
31.在一具体的实施例中,参阅图6、图7所示,油缸动力对接组件6包括固定组件601、伸缩机构支架602、驱动电机603、摆动对接组件604和张力组件605,底架301的顶端通过固定组件601安装有伸缩机构支架602,伸缩机构支架602的底端安装有驱动电机603,伸缩机构支架602的顶端两侧均安装有摆动对接组件604,伸缩机构支架602的顶端安装有张力组件605。
32.在一实施例中,伸缩机构支架602的底端安装有滑轨滑块组件606,伸缩机构支架602的底端一侧安装有油缸缓冲组件607,油缸缓冲组件607的外侧壁安装有液压油缸609,液压油缸609安装在滑轨滑块组件606的外侧壁,伸缩机构支架602的底端安装有导向辅助机构608。
33.在一优选的实施例中,底架301的顶端安装有激光测距装置7,且激光测距装置7设置在安装壳体302的外侧壁,油缸动力对接组件6与对位模块8相连接。
34.在另一优选的实施例中,参阅图5所示,底架301的前后两侧均安装有安全触边装置9。
35.工作原理:对于这类与无动力滚筒对接实现自动转运的穿梭小车,当小车收到转运指令时,伺服电机304启动通过减速器305与第一滚子链轮306、驱动轴组件307为小车的行走提供动力,小车在轨道102上行走,小车行走时警示灯组件303会闪动并发出行走警报,通过电器通讯组件2控制由激光测距装置7精准定位后,停靠在相应坐标时小车停止行走其
次液压站501控制液压油缸609伸出,伸出的液压油缸609与导向辅助机构608连接,导向辅助机构608连接固定组件601,滑轨滑块组件606中的滑轨带动着驱动电机603、伸缩机构支架602、摆动对接组件604、张力组件605和油缸缓冲组件607整体在固定在连接固定组件601上的滑块上平移,当气缸伸缩到位后摆动对接机构5左侧摆动对接组件604对接机右侧摆动对接组件604与对位模块8中的齿轮正好啮合,油缸动力对接组件6与对接对位模块8完成对接,之后对接完成之后减速电机401和驱动电机603同时启动,减速电机401通过链传动将动力传给输送模块404、减速电机401通过链传动将动力传递给摆动对接机构5左侧或者右侧的摆动对接组件604中的齿轮,齿轮通过与对接对位模块8中的齿轮啮合,实现与接对位模块8的动力传递,使输送模块404、与接对位模块8中的滚筒同时滚动,控制减速电机401、驱动电机603的正反转完成器身与托盘在对位模块8与输送模块404的进出,同时当对位模块8与输送模块404中到位感应开关换感应到托盘时,减速电机401和驱动电机603停止转动,最后液压站501控制液压油缸609缩回,液压油缸609与导向辅助机构608连接,导向辅助机构608连接固定组件601,滑轨滑块组件606中的滑轨带动着驱动电机603、伸缩机构支架602、摆动对接组件604、张力组件605和油缸缓冲组件607整体在固定在连接固定组件601上的滑块上平移,齿轮啮合脱开,伸缩机构回到原点,此时当小车再次通过伺服电机304启动通过减速器305与第一滚子链轮306、驱动轴组件307为小车的行走提供动力,小车在轨道102上行走,通过电器通讯组件2控制由激光测距装置7精准定位后,停靠在想要转运到的下一个对接工位时小车停止行走,再次重复对接与转运,实现了两个工位之器身的转运,动作完成后小车停留在原地等待命令,这样一种与无动力滚筒对接实现自动转运的穿梭小车就使用完成了。
36.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1