一种建筑工程施工用清扫垃圾桶的制作方法
1.本实用新型涉及垃圾桶技术领域,具体涉及一种建筑工程施工用清扫垃圾桶。
背景技术:
2.建筑工程室内施工现场会产生很多建渣等垃圾,部分体积较大的建渣垃圾清扫起来比较耗时且耗费人力物力,针对建筑工程室内施工现场的清扫问题,需要设计出带有清扫功能施工用垃圾桶,用于同时处理大小建渣垃圾,保障施工现场干净整洁,确保安全良好的施工环境。
技术实现要素:
3.本实用新型所要解决的技术问题是:建筑工程室内施工现场会产生很多建渣等垃圾,部分体积较大的建渣垃圾清扫起来比较耗时且耗费人力物力的问题,目的在于提供一种建筑工程施工用清扫垃圾桶,解决上述的问题。
4.本实用新型通过下述技术方案实现:
5.一种建筑工程施工用清扫垃圾桶,包括底座和活动桶;所述活动桶上部开口,活动桶底部滑动安装在底座上;所述底座内部安装有内置电池和内置电机;所述底座前侧安装有可拆卸推扫组件,底座底面后侧安装有可拆卸二次清扫组件;所述底座底面位于推扫组件和二次清扫组件之间且靠近底座边缘的位置设置有多个平衡滚轮;所述底座上还设置有用于启动建筑工程施工用清扫垃圾桶的主按钮。
6.进一步地,所述内置电池为充电电池,所述底座远离主按钮的一侧设置有用于给内置电池充电的充电接口。内置电池可以是充电电池也可以是一次性电池。
7.进一步地,所述推扫组件包括设置在底座底面前侧的活动杆以及安装在活动杆上的可拆卸推扫橡胶片;所述二次清扫组件包括安装在底座底面后侧的传动轴以及安装在传动轴上的可拆卸清扫刷。
8.进一步地,所述底座前部侧壁安装有用于探测建筑物以及空间方位的超声波传感器,所述底座侧壁还安装有用于碰撞障碍物后自动转向的碰撞传感器以及侧壁传感器。
9.进一步地,所述底座内部还安装有可拆卸尘盒,可拆卸尘盒底部开设有用于吸附小体积杂质的吸尘口。
10.进一步地,所述活动桶滑动安装在底座上侧,具体为活动桶通过滑动支架安装在底座上侧。活动桶用于存放垃圾,当活动桶内的垃圾比较多需要倾倒垃圾时,活动桶可以轻松地从底座拿出,倒掉垃圾后,再把活动桶放入滑动支架,将其固定在底座上。
11.进一步地,所述滑动支架由设置在底座侧面且与底座互相垂直的活动筒垂直支架和设置在底座上侧的活动筒水平支架组成。
12.进一步地,所述底座和活动桶的形状均为圆柱形,底座的直径大于活动桶的直径。
13.进一步地,所述推扫组件和二次清扫组件均通过浮动杆与底座的底面连接。
14.进一步地,所述平衡滚轮上还设有刹车片。
15.本实用新型的主体包括底座和活动桶。底座和活动筒通过带卡扣滑动支架连接固定,安装稳固,拆卸方便。内置可充电锂电池,由数字信号处理芯片和arm微控制芯片作为设备处理中心。底座前方安装横向推扫橡胶片,推扫橡胶片连接浮动杆,休息状态时推扫片离地;工作状态时工作杆动作,推扫橡胶片紧贴地面。底座下方安装清扫刷,内置电机,电机的底部连接有旋转轴,清扫刷固定于旋转轴上。工作时电机驱动旋转轴,带动清扫刷工作。内置尘盒,清扫刷工作时由尘盒通过吸尘口吸附小体积杂质。推扫橡胶片和清扫刷可拆卸清洁或更换。底座下部安装有两组平衡行走轮,平衡行走轮上设有刹车片,活动桶滑动安装在底座上,在底座侧面设有与底座互相垂直的竖直架。底座前部安装超声波传感器,采用仿生超声波技术,采用声波来侦测判断建筑物品及空间方位,灵敏度高。安装碰撞传感器,碰撞障碍物后自动转向。主按钮包括开机键启动机器,home键使机器回位。
16.当使用该施工用清扫垃圾桶时,首先确认尘盒清空,然后点击主按钮开机,主机开始工作。垃圾桶通过平衡轮控制前进,由超声波传感器探测垃圾桶前方区域是否有障碍,由侧壁传感器控制垃圾桶侧面墙壁行进,浮动杆控制推扫橡胶片贴近地面,推扫橡胶片推扫建渣垃圾跟随垃圾桶行进。清扫刷由电机带动开始工作,清扫的小体积建渣经吸尘口吸入尘盒储存。清理完毕后,大块建渣由推扫橡胶片堆积在一起,人工收入垃圾活动筒中,尘盒内小块建渣一并倒入垃圾活动筒,充电线接入充电插口对电池充电,准备下一次使用。
17.本实用新型与现有技术相比,具有如下的优点和有益效果:
18.本实用新型提供的一种建筑工程施工用清扫垃圾桶,通过底座安装的横向推扫橡胶片对建筑区域建筑垃圾的堆扫提供了便利;通过底座安装的清扫刷对地面区域进行清洁;通过底座安装的超声波传感器为垃圾桶运行轨迹提供了指引;通过滑动支架为活动桶拆卸和安装提供了便利。
附图说明
19.此处所说明的附图用来提供对本实用新型实施例的进一步理解,构成本技术的一部分,并不构成对本实用新型实施例的限定。在附图中:
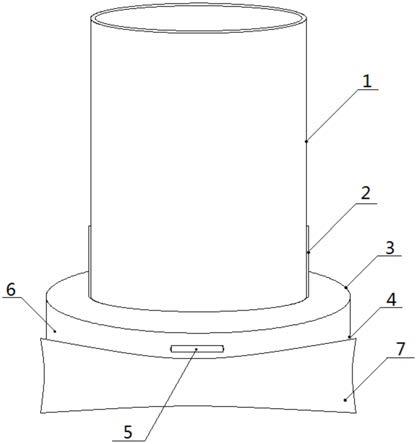
20.图1为本实用新型整体结构示意图;
21.图2为本实用新型底座顶面结构示意图;
22.图3为本实用新型底座底面结构示意图。
23.附图中标记及对应的零部件名称:
24.1-活动桶,2-活动筒垂直支架,3-底座,4-侧壁传感器,5-超声波传感器,6-碰撞传感器,7-推扫橡胶片,8-充电接口,9-主按钮,10-尘盒,11-活动筒水平支架,12-内置电机,13-内置电池,14-活动杆,15-平衡滚轮,16-尘盒吸尘口,17-清扫刷,18-传动轴。
具体实施方式
25.为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本实用新型作进一步的详细说明,本实用新型的示意性实施方式及其说明仅用于解释本实用新型,并不作为对本实用新型的限定。
26.实施例1
27.本实施例1提供一种建筑工程施工用清扫垃圾桶,如图1-图3所示,包括底座3和活
动桶1;所述活动桶1上部开口,活动桶1底部滑动安装在底座3上;所述底座3内部安装有内置电池13和内置电机12;所述底座3前侧安装有活动杆14以及安装在活动杆14上的可拆卸推扫橡胶片7,底座3底面后侧安装有传动轴18以及安装在传动轴18上的可拆卸清扫刷17;所述底座3底面位于推扫组件和二次清扫组件之间且靠近底座边缘的位置设置有两组平衡滚轮15;所述底座3上还设置有用于启动建筑工程施工用清扫垃圾桶的主按钮9。
28.所述内置电池13为充电电池,所述底座3远离主按钮9的一侧设置有用于给内置电池13充电的充电接口8。内置电池可以是充电电池也可以是一次性电池。所述底座3前部侧壁安装有用于探测建筑物以及空间方位的超声波传感器5,所述底座3侧壁还安装有用于碰撞障碍物后自动转向的碰撞传感器6以及侧壁传感器4。
29.所述底座3内部还安装有可拆卸尘盒10,可拆卸尘盒10底部开设有用于吸附小体积杂质的吸尘口。所述活动桶1滑动安装在底座3上侧,具体为活动桶1通过滑动支架安装在底座3上侧。所述滑动支架由设置在底座侧面且与底座互相垂直的活动筒垂直支架2和设置在底座3上侧的活动筒水平支架11组成。所述底座3和活动桶1的形状均为圆柱形,底座3的直径大于活动桶1的直径。所述推扫组件和二次清扫组件均通过浮动杆与底座3的底面连接。所述平衡滚轮15上还设有刹车片。
30.本实用新型工作原理:当使用该施工用清扫垃圾桶时,首先可以确认尘盒10清空,然后点击主按钮9开机,主机开始工作。垃圾桶通过平衡轮15控制前进,由超声波传感器5探测垃圾桶前方区域是否有障碍,由侧壁传感器4控制垃圾桶侧面墙壁行进,浮动杆14控制推扫橡胶片7贴近地面,推扫橡胶片7推扫建渣垃圾跟随垃圾桶行进。清扫刷17由电机12带动开始工作,清扫的小体积建渣经吸尘口16吸入尘盒10储存。清理完毕后,大块建渣由推扫橡胶片7堆积在一起,人工收入垃圾活动筒1中,尘盒10内小块建渣一并倒入垃圾活动筒1,充电线接入充电插口8对电池13充电,准备下一次使用。
31.以上所述的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1