一种智能垃圾分拣车
1.本实用新型涉及垃圾收集领域,特别是指一种智能垃圾分拣车。
背景技术:
2.如今,面对每天成千上万吨的垃圾,如何做到快速分类处理,在这样的背景下,垃圾智能分拣系统应运而生。通过建立全自动化无人垃圾智能分拣系统,实现生活垃圾的智能精准分拣与自动处理,让垃圾变资源,循环利用。
技术实现要素:
3.本实用新型为解决现有技术中存在的问题,提出一种智能垃圾分拣车。
4.本实用新型的技术方案是这样实现的:
5.一种智能垃圾分拣车,包括:带车轮的车体、机械臂、垃圾桶,所述车体的后部为车厢,所述车厢后侧设有活动的后撤板,在所述车厢内设有四个左右交叉分布的垃圾桶,在所述车厢底部还设有重量检测装置;在所述车体的前部为控制厢,在所述控制厢内设有驱动控制板、机械臂驱动板、散热模块,所述驱动控制板为驱动所述车体行走的控制模组,所述机械臂驱动板与所述机械臂连接并驱动所述机械臂运行,在所述车体前部还设有全景的摄像头。
6.优选的,在所述车厢上部还设有红外传感器,5个所述红外传感器交叉安装在四个所述垃圾桶的上方。
7.优选的,所述散热模块采用风力散热,使所述驱动控制板、所述机械臂驱动板散热降温。
8.优选的,所述机械臂后端安装在所述车体前部,所述机械臂前端设有抓取头,所述抓取头也由所述机械臂驱动板控制。
9.优选的,所述摄像头的一侧还设有直流舵机,所述直流舵机的输出端带有偏振片,所述偏振片位于所述摄像头的前方。
10.优选的,所述驱动控制板和所述机械臂驱动板均采用树莓派4b系统。
11.本实用新型的有益效果是:
12.1.智能垃圾分拣车在工作时,对垃圾直接进行分类并投放到对应的垃圾桶中,这种方式更快捷、准确和方便;
13.2.通过重量检测装置和红外传感器判断垃圾桶内的垃圾重量或堆积的高度是否超过所设置的阈值,当超过设定的阈值时垃圾分拣车会执行回到垃圾处理处的程序,这种方式相比只通过重量判断垃圾车是否返回的方式更安全;
14.3.可活动的后撤板可在垃圾分拣车到达垃圾处理处时放下,然后进行分类垃圾桶的装卸,方便快捷;
15.4.在检测区域具有强反光、强光照等对检测结果有较大影响的光照条件时,驱动控制板会控制直流舵机将偏振片移动到摄像头前使检测区域的光照条件一直处于最佳的
识别状态。
附图说明
16.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
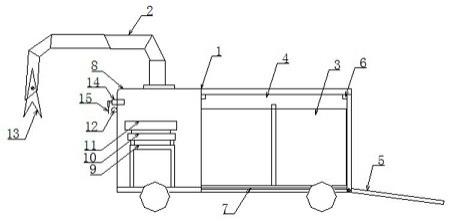
17.图1为本实用新型的结构示意图;
18.图2为本实用新型的俯视图;
19.图3为直流舵机与偏光片的侧视图;
20.图4为直流舵机与偏光片的前视图。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.如图1~图4所示一种智能垃圾分拣车,包括:带车轮的车体1、机械臂2、垃圾桶3,车体1的后部为车厢4,车厢4后侧设有活动的后撤板5,在车厢4内设有四个左右交叉分布的垃圾桶3,四个垃圾桶3一般为:可回收垃圾垃圾桶、有害垃圾垃圾桶、厨余垃圾垃圾桶和其他垃圾垃圾桶,在垃圾分拣车到达垃圾处理站时放下后撤板5,然后进行四个垃圾桶3的装卸。
23.在车厢4上部还设有红外传感器6,5个红外传感器6交叉安装在四个垃圾桶3的上方,用于判断每个所述垃圾桶3内的垃圾高度是否超过的设定的阈值,在车厢4底部还设有重量检测装置7,重量检测装置7会实时检测每个垃圾桶3的重量,当超过设定的阈值时垃圾分拣车会执行回到垃圾处理站的程序。
24.在车体1的前部为控制厢8,在控制厢8内设有驱动控制板9、机械臂驱动板10、散热模块11,驱动控制板9为驱动车体1行走的控制模组,机械臂驱动板10与机械臂2连接并驱动机械臂2运行,机械臂2后端安装在车体1前部,机械臂2前端设有抓取头,抓取头也由机械臂驱动板10控制,在车体1前部还设有全景的摄像头12,摄像头12捕捉并识别检测区域是否出现了垃圾,当出现垃圾时,摄像头12捕捉的垃圾图像信号传送到机械臂驱动板10,机械臂驱动板10识别并对垃圾进行分类定义,然后驱动机械臂2以及抓取头13抓取垃圾并放入对应的垃圾桶3中。
25.散热模块11采用风力散热,使驱动控制板9、机械臂驱动板10散热降温。
26.摄像头12的一侧还设有直流舵机14,直流舵机14的输出端带有偏振片15,偏振片15位于摄像头12的前方,当移动过程中摄像头12所捕捉画面中光照强度超过了所设定的阈值时,驱动控制板9会控制直流舵机14将偏振片15移动到摄像头12前使检测区域的光照条件一直处于最佳的状态下,偏振片15采用的是成像质量的高消光比的偏振片15(iq-her) ,4000线/mm,特殊涂层确保高消光比,而不影响透光率,偏振片15的有效直径为90mm,基材采用的是聚乙烯(远红外,波长20~1000um)。
27.驱动控制板9和机械臂驱动板10均采用采用树莓派4b系统。
28.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种智能垃圾分拣车,其特征在于,包括:带车轮的车体、机械臂、垃圾桶,所述车体的后部为车厢,所述车厢后侧设有活动的后撤板,在所述车厢内设有四个左右交叉分布的垃圾桶,在所述车厢底部还设有重量检测装置;在所述车体的前部为控制厢,在所述控制厢内设有驱动控制板、机械臂驱动板、散热模块,所述驱动控制板为驱动所述车体行走的控制模组,所述机械臂驱动板与所述机械臂连接并驱动所述机械臂运行,在所述车体前部还设有全景的摄像头。2.根据权利要求1所述的智能垃圾分拣车,其特征在于:在所述车厢上部还设有红外传感器,5个所述红外传感器交叉安装在四个所述垃圾桶的上方。3.根据权利要求1所述的智能垃圾分拣车,其特征在于:所述散热模块采用风力散热,使所述驱动控制板、所述机械臂驱动板散热降温。4.根据权利要求1所述的智能垃圾分拣车,其特征在于:所述机械臂后端安装在所述车体前部,所述机械臂前端设有抓取头,所述抓取头也由所述机械臂驱动板控制。5.根据权利要求1所述的智能垃圾分拣车,其特征在于:所述摄像头的一侧还设有直流舵机,所述直流舵机的输出端带有偏振片,所述偏振片位于所述摄像头的前方。6.根据权利要求1所述的智能垃圾分拣车,其特征在于:所述驱动控制板和所述机械臂驱动板均采用树莓派4b系统。
技术总结
本实用新型提出了一种智能垃圾分拣车,车厢后侧设有活动的后撤板,在车厢内设有四个左右交叉分布的垃圾桶,在车厢底部还设有重量检测装置;在车体的前部为控制厢,在控制厢内设有驱动控制板、机械臂驱动板、散热模块,驱动控制板为驱动车体行走的控制模组,机械臂驱动板与机械臂连接并驱动机械臂运行,在车体前部还设有全景的摄像头。其有益效果是:智能垃圾分拣车在工作时,对垃圾直接进行分类并投放到对应的垃圾桶中,这种方式更快捷、准确和方便。准确和方便。准确和方便。
技术研发人员:黄鹏羽 张志峰 张梓航 王宇昊 王瑞 奚海祁 李上上 李文爽 赵丽杭 杨犇 曹仲庆 高万昌 梁韵武
受保护的技术使用者:郑州轻工业大学
技术研发日:2021.11.16
技术公布日:2022/6/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1