一种双功能机械臂的制作方法
1.本实用新型涉及机械设备技术领域,特别涉及一种双功能机械臂。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,随着时代进步,机械手越来越多的应用在各个领域的生产中去。随着科技进步,机械手从单一功能发展为双功能,即一个机械手能完成两个动作。
3.然而一般而言这种机械臂的造价高,容错率低,且校机难度大,需要花费较长的时间进行校机,降低生产效率。
技术实现要素:
4.本实用新型要解决的技术问题是,针对上述现有技术中的不足,提供一种双功能机械臂,其能有效提高容错率,降低校机难度,节省校机时间,提高生产效率。
5.为解决上述技术问题,本实用新型的技术方案是:
6.一种双功能机械臂,包括基板及设于所述基板上的取饼机构与取料架机构,所述取饼机构包括第一安装块、夹爪和垫块,所述第一安装块固定装设于所述基板,所述夹爪和垫块设置于第一安装块,所述取料架机构包括安装架及设于安装架上的驱动组件、两传动组件与两夹持组件,两夹持组件在驱动组件及两传动组件的配合下相向或反向移动,所述夹持组件包括第三安装块、夹持插销和托块,所述夹持插销和托块间隔设置于第三安装块,所述夹持插销和托块之间形成与料架框适配的放置槽。
7.作为一种优选方案,所述夹爪包括固定夹爪,所述固定夹爪包括第一挡板及与第一挡板一体连接的调节杆,所述第一安装块上设置有第一安装孔,所述调节杆的内侧端设置有第一螺纹,所述第一安装孔的内壁设有与第一螺纹适配的第二螺纹。
8.作为一种优选方案,所述夹爪还包括活动夹爪及第一驱动气缸,所述第一驱动气缸固定装设于第一安装块上,所述活动夹爪包括第二安装块和第二挡板,所述第二安装块与第一驱动气缸固定连接,所述第二挡板与第二安装块固定连接。
9.作为一种优选方案,所述第一挡板设置有第一弧面,所述第二挡板设置有第二弧面,所述垫块设置有斜面,所述第一弧面、第二弧面与斜面之间形成用于夹紧料饼的夹持空间。
10.作为一种优选方案,所述取饼机构还包括位置传感器,所述垫块设置有安装槽,所述安装槽设于斜面上,所述位置传感器装设于安装槽中。
11.作为一种优选方案,所述安装架包括安装板及安装杆,所述安装板装设于主板上,所述安装杆与安装板固定连接,所述安装杆为两条,所述限位组件设于两安装杆之间;所述取料架机构还包括限位组件,所述限位组件包括限位块及两限位杆,所述限位块装设于安装板上,两限位杆分设于限位块的两端,所述限位杆与安装板固定连接,所述限位杆与安装杆之间设置有固定杆及固定板,所述限位块与两限位杆围绕形成与料架适配的限位空间。
12.作为一种优选方案,所述传动组件包括第一导向组件、第二导向组件、传动件、传动杆及转轴,所述第一导向组件装设于安装板上,所述第二导向组件装设于固定板上,所述第一导向组件包括第一导轨和第一滑座,所述第一导轨设置于安装板上,所述第一滑座滑动装设于第一导轨上,所述传动件与第一滑座固定连接,所述第二导向组件包括第二导轨和第二滑座,所述第二导轨设置于固定板上,所述第二滑座滑动装设于第二导轨上,所述夹持组件装设于第二滑座上,所述传动杆与传动件铰接,所述传动杆与夹持组件铰接,所述固定杆设置有与转轴适配的第二安装孔,所述传动杆设置有与第二安装孔适配的第三安装孔,所述传动杆绕转轴摆动。
13.作为一种优选方案,所述驱动组件包括压块、驱动杆和第二驱动气缸,所述第二驱动气缸固定装设于安装板上,所述压块与第二驱动气缸固定连接,所述驱动杆固定装设于压块上,所述传动件上设有导向槽,所述驱动杆插入导向槽中,压块向下移动,驱动杆与导向槽配合驱使两传动件横向反向移动,传动杆绕转轴摆动驱使两夹持组件相向移动夹持料架。
14.作为一种优选方案,所述第三安装块设置有防撞板,所述防撞板与第三安装块铰接。
15.作为一种优选方案,所述夹持组件还包括微动开关,所述微动开关装设于防撞板的端部。
16.本实用新型的有益效果是:通过基板、取饼机构和取料架机构的配合能实现自动取料饼和自动取料架两种功能,自动化程度高,功能多,实用性更强;由于取料架机构中使用的是用于插入料架运输环中的夹持插销,在到位之前夹持插销与料架之间为非接触的,如此能有效提高容错率,同时还能有效避免料架与夹持组件之间过多磨耗的问题,使本机械臂的使用寿命更长;所述固定夹爪通过调节杆插入第一安装孔以及第一螺纹与第二螺纹配合沿左右方向调节装设于第一安装块上,这样固定夹爪的调节方法简单,能有效节省校机时间,有效提高生产效率。
附图说明
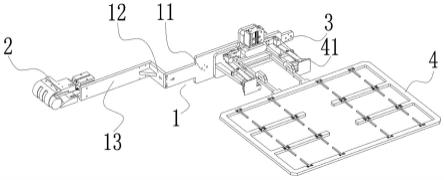
17.图1为本实用新型之实施例的组装结构图;
18.图2为本实用新型之取饼机构的组装结构图;
19.图3为本实用新型之取料架机构的分解图。
20.图中:1-基板1,11-主板11,12-连接板12,13-侧板13,2-取饼机构2,21-第一安装块21,22-固定夹爪22,221-第一挡板221,222-调节杆222,223-第一螺纹223,224-第一弧面224,23-活动夹爪23,231-第二安装块231,232-第二挡板232,233-第二弧面233,24-垫块24,241-斜面241,242-安装槽242,25-第一驱动气缸25,3-取料架机构3,31-安装架31,311-安装板311,312-安装杆312,32-限位组件32,321-限位块321,322-限位杆322,323-固定杆323,324-固定板324,33-夹持组件33,331-第三安装块331,332-夹持插销332,333-托块333,334-放置槽334,335-防撞板335,336-微动开关,3361-主控制部,3362-第一触片,3363-第二触片,34-传动组件34,341-第一导轨341,342-第一滑座342,343-第二导轨343,344-第二滑座344,345-传动件345,346-传动杆346,347-导向槽347,35-驱动组件35,351-压块351,352-第二驱动气缸352,4-料架4,41-运输环41,5-位置传感器。
具体实施方式
21.下面结合附图对本实用新型的结构原理和工作原理作进一步详细说明。
22.如图1所示, 一种双功能机械臂,包括基板1及设于基板1上的取饼机构2和取料架机构3。
23.所述基板1包括主板11、自主板11一侧向后折弯形成的连接板12和自连接板12后端横向向外折弯形成的侧板13,所述取饼机构2设于侧板13上,所述取料架机构设于主板11上。
24.如图2所示,所述取饼机构2包括第一安装块21、夹爪和垫块24,所述第一安装块21固定装设于侧板13的外侧端,所述夹爪和垫块24自上而下设置于第一安装块21上,所述夹爪包括固定夹爪22、活动夹爪23和驱使活动夹爪23横向来回的第一驱动气缸25,所述固定夹爪22装设于垫块24的上方,所述活动夹爪23设于固定夹爪22的上方,所述第一驱动气缸25固定装设于第一安装块21上,所述活动夹爪23与第一驱动气缸25的伸缩端固定连接。
25.所述固定夹爪22包括第一挡板221及与第一挡板221一体连接的调节杆222,所述第一安装块21上设置有第一安装孔,所述调节杆222的内侧端设置有第一螺纹223,所述第一安装孔的内壁设有与第一螺纹223适配的第二螺纹,所述固定夹爪22通过调节杆222插入第一安装孔以及第一螺纹223与第二螺纹配合安装于第一安装块21上,并且可横向调节固定夹爪22的位置以适应不同规格料饼,有效提高本夹持组件33的适用范围。
26.所述活动夹爪23包括第二安装块231和第二挡板232,所述第二安装块231的内侧端与第一驱动气缸25的伸缩端固定连接,所述第二安装块231的外侧端与第二挡板232固定连接。
27.所述第一挡板221的外侧设置有自外向内凹的第一弧面224,所述第二挡板232的内侧设置有自内向外凸起的第二弧面233,所述垫块24的外侧端设置有自内向外向下倾斜的斜面241,所述第一弧面224、第二弧面233与斜面241之间形成用于夹紧料饼的夹持空间。
28.所述第二挡板232为弹性钢板,如此能有效避免抓伤料饼,对料饼起到保护作用。
29.所述取饼机构2还包括用于检测料饼是否到位的位置传感器5,所述垫块24设置有安装槽242,所述安装槽242设于斜面241上,所述位置传感器5装设于安装槽242中。在实际应用中,位置传感器5一般与机械臂的控制器通信连接,当料饼遮挡位置传感器5,那么控制器收到位置传感器5发出料饼到位的信息,控制器控制第一驱动气缸25驱动活动夹爪23横向向内移动,抓取料饼;所述位置传感器5为光纤传感器。
30.在这一实施例中,所述安装槽242为三个,三个安装槽242之间沿斜面241宽度方向间隔设置,安装槽242与位置传感器5为一一对应关系,这样对料饼位置的检测准确度更高,有效提高本双功能机械臂的工作稳定性。
31.如图3所示,所述取料架机构包括安装架31、限位组件32、两夹持组件33、两传动组件34和用于驱使两夹持组件33横向相向或反向移动的驱动组件35,所述限位组件32、驱动组件35、传动组件34和夹持组件33均装设于安装架31上。
32.所述安装架31包括安装板311和沿前后方向设置的安装杆312,所述安装板311装设于主板11上,所述安装杆312的后端与安装板311固定连接,所述安装杆312为两条,两条安装杆312之间平行设置,所述限位组件32设于两安装杆312之间。
33.所述限位组件32包括限位块321和两限位杆322,所述限位块321装设于安装板311
上,两限位杆322沿前后方向分设于限位块321的左右两端,两限位杆322之间平行设置,所述限位杆322的后端与安装板311固定连接,所述限位杆322和安装杆312的中部设置有固定杆323,所述限位杆322和安装杆312的前端设置有固定板324,所述限位块321与两限位杆322围绕形成与料架4适配的限位空间。
34.两个传动组件34沿左右方向平行设置,所述传动组件34包括第一导向组件、第二导向组件、传动件345、传动杆346和转轴,所述第一导向组件装设于安装板311上,所述第二导向组件装设于固定板324上,所述第一导向组件包括第一导轨341和第一滑座342,所述第一导轨341沿左右方向设置于安装板311上,所述第一滑座342滑动装设于第一导轨341上,所述传动件345与第一滑座342固定连接,所述第二导向组件包括第二导轨343和第二滑座344,所述第二导轨343沿左右方向设置于固定板324上,所述第二滑座344滑动装设于第二导轨343上,所述夹持组件33装设于第二滑座344上,所述传动杆346的后端与传动件345的外侧端铰接,所述传动杆346的前端与夹持组件33铰接,所述固定杆323的中部设置有与转轴适配的第二安装孔,所述传动杆346的中部设置有与第二安装孔适配的第三安装孔,所述传动杆346绕转轴横向摆动。
35.所述驱动组件35包括压块351、驱动杆和第二驱动气缸352,所述第二驱动气缸352固定装设于安装板311上,所述压块351与第二驱动气缸352的伸缩端固定连接,所述驱动杆沿前后方向固定装设于压块351的后端,所述传动件345上设有自外向内向下倾斜设置的导向槽347,所述驱动杆的后端插入导向槽347中,所述压块351在第二驱动气缸352的驱动下向下移动,驱动杆随着压块351向下移动,驱动杆与导向槽347配合驱使两传动件345横向反向移动,传动杆346绕转轴摆动驱使两夹持组件33横向相向移动夹持料架4。
36.所述夹持组件33包括第三安装块331、用于插入料架4运输环41中的夹持插销332和用于承托料架4的托块333,所述夹持插销332和托块333自上而下间隔设置于第三安装块331的内侧,所述夹持插销332和托块333之间形成与料架4框适配的放置槽334。
37.所述第三安装块331的前端设置有防撞板335,所述防撞板335的外侧与第三安装块331的外侧铰接,所述防撞板335包括主体部和自主体部内侧横向向内延伸形成的防撞部,所述防撞部的上端与托块333的上端平齐。
38.所述夹持组件33还包括微动开关336,所述微动开关336包括主控制部3361、第一触片3362及第二触片3363,所述主控制部3361装设于第三安装块331的下端,所述第一触片3362安装于防撞板的后端,所述第一触片3362与所述主控制部3361电连接,所述第二触片3363包括安装部、自安装部向后折弯形成的连接部以及自连接部横向向外延伸形成的接触部,所述安装部上设有第四安装孔,所述防撞板上设有第五安装孔,所述第二触片3363通过螺栓穿过第四安装孔和第五安装孔与螺母配合安装于防撞板的后端,所述接触部与第一触片3362前后间距设置。
39.在实际应用中,所述微动开关336与机械臂的控制器通信连接,当有外力驱使第一触片3362与接触部相接时,微动开关336发出触动信号,控制器控制第一驱动气缸和第二驱动气缸停止工作以实现防呆功能,提高多功能机械臂的安全性能。
40.本实用新型的有益效果是:通过基板1、取饼机构2和取料架机构3的配合能实现自动取料饼和自动取料架两种功能,自动化程度高,功能多,实用性更强;由于取料架机构3中使用的是用于插入料架4运输环41中的夹持插销332,在到位之前夹持插销332与料架4之间
为非接触的,如此能有效提高容错率,同时还能有效避免料架4与夹持组件33之间过多磨耗的问题,使本机械臂的使用寿命更长;所述固定夹爪22通过调节杆222插入第一安装孔以及第一螺纹223与第二螺纹配合沿左右方向调节装设于第一安装块21上,这样固定夹爪22的调节方法简单,能有效节省校机时间,有效提高生产效率。
41.以上所述,仅是本实用新型较佳实施方式,凡是依据本实用新型的技术方案对以上的实施方式所作的任何细微修改、等同变化与修饰,均属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1