一种具有自动压缩功能的智能垃圾箱的制作方法
1.本实用新型属于垃圾箱技术领域,具体涉及一种具有自动压缩功能的智能垃圾箱。
背景技术:
2.垃圾桶,又名废物箱或垃圾箱,是指装放垃圾的容器。多数以金属或塑胶制,用时放入塑料袋,当垃圾一多便可扎起袋丢掉。垃圾桶是人们生活中存放垃圾的容器,多数垃圾桶都有盖以防垃圾的异味四散,有些垃圾桶可以以脚踏开启,家居的垃圾桶多数放于厨房,以便放置厨余,有些家庭会在主要房间都各置一,有些游乐场的垃圾桶会特别设计成可爱的人物,为了城市街道的整洁卫生,在道路两侧会设置大量的公共垃圾箱,用于路人投放垃圾,从而减少随手丢弃垃圾的行为。
技术实现要素:
3.由于道路两旁公共垃圾箱往往设置在人行道上,人行道和机动车道之间间隔着非机动车道,非机动车道内非机动车辆较多,大型垃圾车不便驶入,垃圾箱内垃圾的收集往往通过环卫工人驾驶环卫三轮车进行收集,或将大型垃圾车停放在机动车道路边,由环卫工人手动牵引大垃圾桶进行逐个收集,为了能使垃圾箱能够容纳更多垃圾,减少垃圾箱内垃圾清理次数,减轻环卫工人的负担,产生了可自动对内部垃圾进行压缩的垃圾箱,但这种垃圾箱在提升垃圾容量的同时,在压缩垃圾时,垃圾会对垃圾箱内桶产生膨胀挤压力,而垃圾箱内桶又会对垃圾产生约束挤压力,在清理时,由于压实的垃圾与垃圾箱内桶之间的挤压力,容易导致压实后的垃圾很难倒出来,不放便环卫工人的清理工作。本实用新型提供了一种具有自动压缩功能的智能垃圾箱,设置了由左侧内桶体和右侧内桶体组成的可分离的垃圾箱内桶,可避免被压实的垃圾与垃圾桶内桶之间相互挤压造成的难以倒出的情况。
4.本实用新型提供如下技术方案:一种具有自动压缩功能的智能垃圾箱,包括垃圾箱外箱体,所述垃圾箱外箱体的左右侧壁均贯通有垃圾投入口,所述垃圾箱外箱体的顶部通过合页转动安装有顶板,所述顶板的底部固定安装有剪叉压缩装置,所述垃圾箱外箱体的内后侧壁固定安装有第一滑轨和第二滑轨,所述第一滑轨的底部固定安装有第一电机,所述第一电机的输出轴与升降丝杆固定连接,所述第一滑轨和第二滑轨上均滑动安装有滑块,所述第一滑轨上的滑块被升降丝杆贯穿并与其螺旋传动连接,所述滑块的前半部分其上方固定安装有垃圾桶外桶体承托板,所述垃圾桶外桶体承托板的顶部通过销轴转动安装有垃圾桶外桶体,所述垃圾桶外桶体的内侧固定安装有分合式垃圾桶内桶装置,所述垃圾箱外箱体的底部固定安装有液体收纳仓,所述垃圾箱外箱体的内腔中固定安装有控制装置。
5.其中的,所述剪叉压缩装置包括螺接在所述顶板底部的电动剪叉式伸缩装置,所述电动剪叉式伸缩装置的底部固定安装有压缩板;每当到达定时时间时,可编程plc控制电动剪叉式伸缩装置做伸展动作,带动压缩板下压进左侧内桶体和右侧内桶体组成的垃圾桶
内桶中,对垃圾桶内桶中的垃圾进行一次压缩,压缩完成后电动剪叉式伸缩装置复位。
6.其中的,所述分合式垃圾桶内桶装置包括固定安装在所述垃圾桶外桶体内底壁上的电机安装座,所述电机安装座上安装有第二电机,所述第二电机的输出轴与双向丝杆固定连接,所述双向丝杆的左端与所述垃圾桶外桶体的左侧内壁转动连接,所述垃圾桶外桶体的左右内侧壁之间还固定连接有滑杆,所述滑杆与左右两个滑套滑动连接,左侧的所述滑套的顶部固定安装有左侧内桶体,右侧的所述滑套的顶部固定安装有右侧内桶体,所述左侧内桶体和所述右侧内桶体的底部均固定设有螺纹套,两个所述螺纹套均被所述双向丝杆贯穿并分别与所述双向丝杆左右两个螺纹部螺纹连接;通过销轴转动垃圾桶外桶体,使其桶口朝向左下方对准环卫三轮车或大垃圾桶,此时控制第二电机运转带动双向丝杆转动,使左侧内桶体上的螺纹套和右侧内桶体上的螺纹套在双向丝杆两个方向相反的螺纹部的带动下,在滑套和滑杆的配合下做背向运动,使左侧内桶体和右侧内桶体之间分离,此时被压实的垃圾在重力作用下即可滑落入环卫三轮车或大垃圾桶中,从而避免被压实的垃圾与垃圾桶内桶之间相互挤压造成的难以倒出的情况,由于垃圾桶外桶体的设置,即使被压实的垃圾发生散开的情况,也都会沿着垃圾桶外桶体的内壁滑落进环卫三轮车或大垃圾桶中,垃圾排出后,控制第二电机反向运转,即可带动左侧内桶体和右侧内桶体重新组合成一个完整的垃圾桶内桶。
7.其中的,所述左侧内桶体和所述右侧内桶体的底部均设有开口并固定安装有过滤网,所述左侧内桶体和所述右侧内桶体的底部均固定安装有支撑横梁,所述左侧内桶体的内腔中固定安装有第一激光感应装置;过滤网用于垃圾中水分的通过,同时对垃圾进行承托,支撑横梁用于对过滤网进行承托,为其进行加固,避免在压缩垃圾时过滤网破裂。
8.其中的,所述垃圾桶外桶体的底部和垃圾桶外桶体承托板的顶面和底面之间贯通设有若干液体通过口;液体通过口是垃圾中的液体从垃圾桶外桶体中流入液体收纳盒中的通道。
9.其中的,所述液体收纳仓的前侧板贯穿有液体收纳盒通过口,所述液体收纳仓的内部设有第二激光感应装置,所述液体收纳仓的内腔中固定安装有液体收纳盒,所述液体收纳盒与液体收纳仓之间通过第一电磁锁锁定;第二激光感应装置用于感应液体收纳盒中的液面高度。
10.其中的,所述垃圾箱外箱体的左右侧面均焊接有垃圾投放斗,所述垃圾投入口的内侧转动安装有导向板,所述导向板的前端与电动马达的输出轴固定连接,所述垃圾箱外箱体与所述顶板之间通过第二电磁锁锁定;路人可通过垃圾投放斗将垃圾从垃圾投入口投入垃圾箱外箱体内部,垃圾通过导向板滑落入左侧内桶体和右侧内桶体共同组成的垃圾桶内桶中,当需要将垃圾桶外桶体上升至垃圾箱外箱体上方时,控制电动马达运行带动导向板向上转动至不阻碍垃圾桶外桶体上升的位置。
11.其中的,所述控制装置的内腔中设有定时模块、可编程plc、4g无线通讯模块和gps定位模块;通过定时模块可设置每次电动剪叉式伸缩装置的工作时间间隔,4g无线通讯模块用于与环卫部门和环卫工人的通信,gps定位模块用于对垃圾箱的定位。
12.本实用新型的有益效果是:本装置使用时,通过可编程plc控制定时模块定时,设置电动剪叉式伸缩装置每次工作的间隔时间,路人可通过垃圾投放斗将垃圾从垃圾投入口投入垃圾箱外箱体内部,垃圾通过导向板滑落入左侧内桶体和右侧内桶体共同组成的垃圾
桶内桶中,每当到达定时时间时,可编程plc控制电动剪叉式伸缩装置做伸展动作,带动压缩板下压进左侧内桶体和右侧内桶体组成的垃圾桶内桶中,对垃圾桶内桶中的垃圾进行一次压缩,压缩完成后电动剪叉式伸缩装置复位,垃圾中的液体可透过过滤网流入垃圾桶外桶体中,并最终通过垃圾桶外桶体底部和垃圾桶外桶体承托板上的液体通过口流入液体收纳仓中的液体收纳盒中,随着垃圾的不断增多,当垃圾堆积到高过第一激光感应装置的高度时,第一激光感应装置发出的激光持续照射在垃圾上,感应到激光反射距离变化的保持时间较长,即通过4g无线通讯模块通知环卫部门,并通过gps定位模块定位此垃圾箱的位置通过4g无线通讯模块传输至环卫部门,提醒环卫部门工作人员及时前来处理垃圾,当第二激光感应装置感应到液体收纳盒中的液体装满后,同样进行上述通知工作,综上所述,本装置可自动进行定时的对内部垃圾的压缩工作,并可将垃圾中的液体和固体进行分离,减缓垃圾的腐烂,从而减少异味的产生和微生物的滋生,并可在固体垃圾和液体垃圾达到最大容量后自动通知环卫部门前来处理,利用gps定位模块,还可使环卫工人快速找到待处理的垃圾箱。
13.环卫工人前来处理垃圾时,将收集垃圾的环卫三轮车或大垃圾桶停在垃圾箱外箱体左侧,即可通过手机等移动设备对控制装置下达指令,控制电动马达运行带动导向板向上转动至不阻碍垃圾桶外桶体上升的位置,并控制第一电磁锁和第二电磁锁解锁,将顶板转动度打开,即可控制第一电机带动升降丝杆转动,利用螺旋传动带动滑块连同垃圾桶外桶体承托板上升至垃圾桶外桶体承托板顶面高过垃圾箱外箱体的顶面,即可通过销轴转动垃圾桶外桶体,使其桶口朝向左下方对准环卫三轮车或大垃圾桶,并控制第二电机运转带动双向丝杆转动,使左侧内桶体上的螺纹套和右侧内桶体上的螺纹套在双向丝杆两个方向相反的螺纹部的带动下,在滑套和滑杆的配合下做背向运动,使左侧内桶体和右侧内桶体之间分离,此时被压实的垃圾在重力作用下即可滑落入环卫三轮车或大垃圾桶中,从而避免被压实的垃圾与垃圾桶内桶之间相互挤压造成的难以倒出的情况。
14.该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
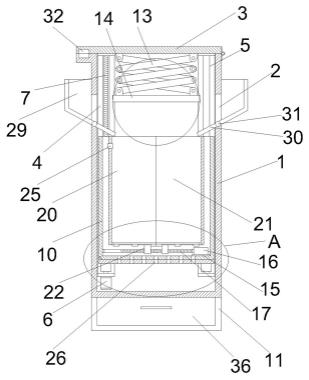
15.图1为本实用新型的正视剖视结构示意图;
16.图2为本实用新型的左视剖视结构示意图;
17.图3为本实用新型中垃圾桶外桶体、左侧内桶体和右侧内桶体的俯视结构示意图;
18.图4为本实用新型中垃圾桶外桶体的俯视结构示意图;
19.图5为本实用新型中a部放大结构示意图;
20.图6为本实用新型中b部放大结构示意图;
21.图7为本实用新型中c部放大结构示意图;
22.图中:1、垃圾箱外箱体;2、垃圾投入口;3、顶板;4、第一滑轨;5、第二滑轨;6、第一电机;7、升降丝杆;8、滑块;9、垃圾桶外桶体承托板; 10、垃圾桶外桶体;11、液体收纳仓;12、控制装置;13、电动剪叉式伸缩装置;14、压缩板;15、电机安装座;16、第二电机;17、双向丝杆;18、滑杆;19、滑套;20、左侧内桶体;21、右侧内桶体;22、螺纹套;23、过滤网;24、支撑横梁;25、第一激光感应装置;26、液体通过口;27、第二激光感应装置;28、第一电磁锁;29、垃圾投放斗;30、导向板;31、电动马达;32、第二电磁锁;33、定时模块;34、可编程plc;35、4g
无线通讯模块;36、液体收纳盒;37、gps定位模块。
具体实施方式
23.请参阅图1-图7,本实用新型提供以下技术方案:一种具有自动压缩功能的智能垃圾箱,包括垃圾箱外箱体1,所述垃圾箱外箱体1的左右侧壁均贯通有垃圾投入口2,所述垃圾箱外箱体1的顶部通过合页转动安装有顶板3,所述顶板3的底部固定安装有剪叉压缩装置,所述垃圾箱外箱体1的内后侧壁固定安装有第一滑轨4和第二滑轨5,所述第一滑轨4的底部固定安装有第一电机6,所述第一电机6的输出轴与升降丝杆7固定连接,所述第一滑轨4 和第二滑轨5上均滑动安装有滑块8,所述第一滑轨4上的滑块8被升降丝杆 7贯穿并与其螺旋传动连接,所述滑块8的前半部分其上方固定安装有垃圾桶外桶体承托板9,所述垃圾桶外桶体承托板9的顶部通过销轴转动安装有垃圾桶外桶体10,所述垃圾桶外桶体10的内侧固定安装有分合式垃圾桶内桶装置,所述垃圾箱外箱体10的底部固定安装有液体收纳仓11,所述垃圾箱外箱体 10的内腔中固定安装有控制装置12。
24.所述剪叉压缩装置包括螺接在所述顶板3底部的电动剪叉式伸缩装置13,所述电动剪叉式伸缩装置13的底部固定安装有压缩板14;每当到达定时时间时,可编程plc34控制电动剪叉式伸缩装置13做伸展动作,带动压缩板14 下压进左侧内桶体20和右侧内桶体21组成的垃圾桶内桶中,对垃圾桶内桶中的垃圾进行一次压缩,压缩完成后电动剪叉式伸缩装置13复位。
25.所述分合式垃圾桶内桶装置包括固定安装在所述垃圾桶外桶体10内底壁上的电机安装座15,所述电机安装座15上安装有第二电机16,所述第二电机16的输出轴与双向丝杆17固定连接,所述双向丝杆17的左端与所述垃圾桶外桶体10的左侧内壁转动连接,所述垃圾桶外桶体10的左右内侧壁之间还固定连接有滑杆18,所述滑杆18与左右两个滑套19滑动连接,左侧的所述滑套19的顶部固定安装有左侧内桶体20,右侧的所述滑套19的顶部固定安装有右侧内桶体21,所述左侧内桶体20和所述右侧内桶体21的底部均固定设有螺纹套22,两个所述螺纹套22均被所述双向丝杆17贯穿并分别与所述双向丝杆17左右两个螺纹部螺纹连接;通过销轴转动垃圾桶外桶体10,使其桶口朝向左下方对准环卫三轮车或大垃圾桶,此时控制第二电机16运转带动双向丝杆17转动,使左侧内桶体20上的螺纹套和右侧内桶体21上的螺纹套22在双向丝杆17两个方向相反的螺纹部的带动下,在滑套19和滑杆18 的配合下做背向运动,使左侧内桶体20和右侧内桶体21之间分离,此时被压实的垃圾在重力作用下即可滑落入环卫三轮车或大垃圾桶中,从而避免被压实的垃圾与垃圾桶内桶之间相互挤压造成的难以倒出的情况,由于垃圾桶外桶体10的设置,即使被压实的垃圾发生散开的情况,也都会沿着垃圾桶外桶体10的内壁滑落进环卫三轮车或大垃圾桶中,垃圾排出后,控制第二电机 16反向运转,即可带动左侧内桶体20和右侧内桶体21重新组合成一个完整的垃圾桶内桶。
26.所述左侧内桶体20和所述右侧内桶体21的底部均设有开口并固定安装有过滤网23,所述左侧内桶体20和所述右侧内桶体21的底部均固定安装有支撑横梁24,所述左侧内桶体20的内腔中固定安装有第一激光感应装置25;过滤网23用于垃圾中水分的通过,同时对垃圾进行承托,支撑横梁24用于对过滤网23进行承托,为其进行加固,避免在压缩垃圾时过滤网23破裂。
27.所述垃圾桶外桶体10的底部和垃圾桶外桶体承托板9的顶面和底面之间贯通设有若干液体通过口26;液体通过口26是垃圾中的液体从垃圾桶外桶体 10中流入液体收纳盒36中的通道。
28.所述液体收纳仓11的前侧板贯穿有液体收纳盒通过口,所述液体收纳仓 11的内部设有第二激光感应装置27,所述液体收纳仓11的内腔中固定安装有液体收纳盒36,所述液体收纳盒36与液体收纳仓11之间通过第一电磁锁 28锁定;第二激光感应装置27用于感应液体收纳盒36中的液面高度。
29.所述垃圾箱外箱体1的左右侧面均焊接有垃圾投放斗29,所述垃圾投入口2的内侧转动安装有导向板30,所述导向板30的前端与电动马达31的输出轴固定连接,所述垃圾箱外箱体1与所述顶板3之间通过第二电磁锁32锁定;路人可通过垃圾投放斗29将垃圾从垃圾投入口2投入垃圾箱外箱体1内部,垃圾通过导向板30滑落入左侧内桶体20和右侧内桶体21共同组成的垃圾桶内桶中,当需要将垃圾桶外桶体10上升至垃圾箱外箱体1上方时,控制电动马达31运行带动导向板30向上转动至不阻碍垃圾桶外桶体10上升的位置。
30.所述控制装置12的内腔中设有定时模块33、可编程plc34、4g无线通讯模块35和gps定位模块37;通过定时模块33可设置每次电动剪叉式伸缩装置13的工作时间间隔,4g无线通讯模块35用于与环卫部门和环卫工人的通信,gps定位模块37用于对垃圾箱的定位。
31.本实用新型的工作原理及使用流程:本装置使用时,通过可编程plc34 控制定时模块33定时,设置电动剪叉式伸缩装置13每次工作的间隔时间,路人可通过垃圾投放斗29将垃圾从垃圾投入口2投入垃圾箱外箱体1内部,垃圾通过导向板30滑落入左侧内桶体20和右侧内桶体21共同组成的垃圾桶内桶中,每当到达定时时间时,可编程plc34控制电动剪叉式伸缩装置13做伸展动作,带动压缩板14下压进左侧内桶体20和右侧内桶体21组成的垃圾桶内桶中,对垃圾桶内桶中的垃圾进行一次压缩,压缩完成后电动剪叉式伸缩装置13复位,垃圾中的液体可透过过滤网23流入垃圾桶外桶体10中,并最终通过垃圾桶外桶体10底部和垃圾桶外桶体承托板9上的液体通过口26 流入液体收纳仓11中的液体收纳盒36中,随着垃圾的不断增多,当垃圾堆积到高过第一激光感应装置25的高度时,第一激光感应装置25发出的激光持续照射在垃圾上,感应到激光反射距离变化的保持时间较长,即通过4g无线通讯模块35通知环卫部门,并通过gps定位模块37定位此垃圾箱的位置通过4g无线通讯模块35传输至环卫部门,提醒环卫部门工作人员及时前来处理垃圾,当第二激光感应装置感27应到液体收纳盒36中的液体装满后,同样进行上述通知工作,环卫工人前来处理垃圾时,将收集垃圾的环卫三轮车或大垃圾桶停在垃圾箱外箱体1左侧,即可通过手机等移动设备对控制装置12下达指令,控制电动马达31运行带动导向板30向上转动至不阻碍垃圾桶外桶体10上升的位置,并控制第一电磁锁28和第二电磁锁32解锁,将顶板3转动180度打开,即可控制第一电机6带动升降丝杆7转动,利用螺旋传动带动滑块8连同垃圾桶外桶体承托板9上升至垃圾桶外桶体承托板9顶面高过垃圾箱外箱体1的顶面,即可通过销轴转动垃圾桶外桶体10,使其桶口朝向左下方对准环卫三轮车或大垃圾桶,并控制第二电机16运转带动双向丝杆17转动,使左侧内桶体20上的螺纹套和右侧内桶体21上的螺纹套22 在双向丝杆17两个方向相反的螺纹部的带动下,在滑套19和滑杆18的配合下做背向运动,使左侧内桶体20和右侧内桶体21之间分离,此时被压实的垃圾在重力作用下即可滑落入环卫三轮车或大垃圾桶中,从而避免被压实的垃圾与垃圾桶内桶之间相互挤压造成的难以倒出的情况,由于垃
圾桶外桶体 10的设置,即使被压实的垃圾发生散开的情况,也都会沿着垃圾桶外桶体10 的内壁滑落进环卫三轮车或大垃圾桶中,垃圾排出后,控制第二电机16反向运转,即可带动左侧内桶体20和右侧内桶体21重新组合成一个完整的垃圾桶内桶,转动垃圾桶外桶体10使其桶口重新朝向上方,控制第一电机6带动垃圾桶外桶体10复位即可关闭顶板3并重新使用第二电磁锁32将顶板3和垃圾箱外箱体1锁定,对于装满液体的液体收纳盒36,可在第一电磁锁28解锁后直接将其取出,将其内部的液体倒出至收集容器中,最后将其放回液体收纳仓11中并重新使用第一电磁锁28将其与液体收纳仓11锁定即可。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1