一种基于工业自动化生产的传送设备的制作方法
1.本实用新型涉及传送设备技术领域,特别涉及一种基于工业自动化生产的传送设备。
背景技术:
2.在零件加工的过程中需要对其进行多工序的加工,那么在零件各个工序转换东额过程中就需要对零件进行输送传送,那么这就需要使用传送装置来实现。
3.然而,就目前传统传送设备而言,首先,不能够实现限位结构与辅助结构的相互配合;其次,不能够实现指示灯的擦拭清洁。
技术实现要素:
4.有鉴于此,本实用新型提供一种基于工业自动化生产的传送设备,其具有凸起,通过凸起的设置,一方面,能够实现零件的限位固定,另一方面,通过凸起与滑动臂的配合能够实现指示灯的擦拭清洁。
5.本实用新型提供了一种基于工业自动化生产的传送设备,具体包括:架体、辅助部和检测部;所述架体放置在地面上,且架体上输送有传送带,并且传送带上放置有零件;所述架体上通过螺栓固定连接有两个滑动座,且每个滑动座上均对称滑动连接有两个固定座;每个固定座上均插接有两个固定螺栓,且四个固定螺栓均与地面预埋的膨胀螺母螺纹连接,并且当固定螺栓螺纹拧紧后固定座呈弹性弯曲状;架体上通过螺栓固定连接有安装架;所述辅助部由滑动臂、擦拭座和弹性件a组成,且滑动臂滑动连接在安装架上;所述检测部由检测臂和弹性件b组成,且检测臂滑动连接在安装架上。
6.可选地,所述传送带顶端面左侧呈线性阵列状熔接有凸起,且传送带顶端面右侧也呈线性阵列状熔接有凸起,并且左侧的凸起和右侧凸起均与零件接触。
7.可选地,所述架体上通过螺栓固定连接有安装架,且安装架为凹状结构;所述安装架上通过螺栓固定连接有安装座,且安装座上安装有指示灯,并且指示灯上安装有接触开关。
8.可选地,所述滑动臂上焊接有擦拭座,且擦拭座为环形结构,并且擦拭座套接在指示灯上。
9.可选地,所述滑动臂上焊接有挡环,且滑动臂上套接有弹性件a,并且弹性件a组成了滑动臂的弹性复位结构;滑动臂头端为弧形结构,且滑动臂头端与传送带顶端面接触,并且滑动臂与凸起位置对正。
10.可选地,所述检测臂上焊接有挡环,且检测臂上套接有弹性件b,并且弹性件b组成了检测臂的弹性复位结构。
11.可选地,所述检测臂的头端为球形结构,且检测臂的头端与零件之间的间距为0.5mm,并且检测臂的尾端与接触开关之间的间距为0.5mm。
12.有益效果
13.通过凸起的设置,第一,因传送带顶端面左侧呈线性阵列状熔接有凸起,且传送带顶端面右侧也呈线性阵列状熔接有凸起,并且左侧的凸起和右侧凸起均与零件接触,从而可实现凸起的限位固定;
14.第二,因所述滑动臂上焊接有挡环,且滑动臂上套接有弹性件a,并且弹性件a组成了滑动臂的弹性复位结构;滑动臂头端为弧形结构,且滑动臂头端与传送带顶端面接触,并且滑动臂与凸起位置对正,从而当传送带移动时在凸起的拨动下可实现滑动臂的上下运动,进而也就实现了指示灯的擦拭清洁。
15.通过检测部的设置,因检测臂的头端为球形结构,且检测臂的头端与零件之间的间距为0.5mm,并且检测臂的尾端与接触开关之间的间距为0.5mm,从而当零件高度过高时可挤压检测臂进而实现了指示灯的报警。
附图说明
16.为了更清楚地说明本实用新型的实施例的技术方案,下面将对实施例的附图作简单地介绍。
17.下面描述中的附图仅仅涉及本实用新型的一些实施例,而非对本实用新型的限制。
18.在附图中:
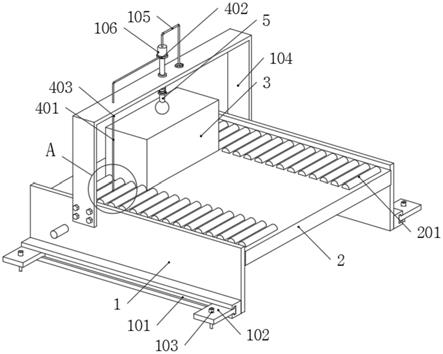
19.图1是本实用新型的轴视结构示意图。
20.图2是本实用新型图1的a处放大结构示意图。
21.图3是本实用新型的主视结构示意图。
22.图4是本实用新型图3的b处放大结构示意图。
23.图5是本实用新型的左视结构示意图。
24.附图标记列表
25.1、架体;101、滑动座;102、固定座;103、固定螺栓;104、安装架;105、安装座;106、指示灯;2、传送带;201、凸起;3、零件;4、辅助部;401、滑动臂;402、擦拭座;403、弹性件a;5、检测部;501、检测臂;502、弹性件b。
具体实施方式
26.为了使得本实用新型的技术方案的目的、方案和优点更加清楚,下文中将结合本实用新型的具体实施例的附图,对本实用新型实施例的技术方案进行清楚、完整的描述。除非另有说明,否则本文所使用的术语具有本领域通常的含义。附图中相同的附图标记代表相同的部件。
27.实施例:请参考图1至图5:
28.本实用新型提出了一种基于工业自动化生产的传送设备,包括:架体1、辅助部4和检测部5;架体1放置在地面上,且架体1上输送有传送带2,并且传送带2上放置有零件3;架体1上通过螺栓固定连接有安装架104;辅助部4由滑动臂401、擦拭座402和弹性件a403组成,且滑动臂401滑动连接在安装架104上;
29.检测部5由检测臂501和弹性件b502组成,且检测臂501滑动连接在安装架104上。
30.此外,根据本实用新型的实施例,如图1所示,架体1上通过螺栓固定连接有两个滑
动座101,且每个滑动座101上均对称滑动连接有两个固定座102;每个固定座102上均插接有两个固定螺栓103,且四个固定螺栓103均与地面预埋的膨胀螺母螺纹连接,并且当固定螺栓103螺纹拧紧后固定座102呈弹性弯曲状,从而一方面,可实现固定座102与滑动座101之间的固定,另一方面,还能够实现固定螺栓103的弹性抵紧。
31.此外,根据本实用新型的实施例,如图1所示,传送带2顶端面左侧呈线性阵列状熔接有凸起201,且传送带2顶端面右侧也呈线性阵列状熔接有凸起201,并且左侧的凸起201和右侧凸起201均与零件3接触,从而可实现凸起201的限位固定。
32.此外,根据本实用新型的实施例,如图4所示,架体1上通过螺栓固定连接有安装架104,且安装架104为凹状结构;安装架104上通过螺栓固定连接有安装座105,且安装座105上安装有指示灯106,并且指示灯106上安装有接触开关,从而当接触开关被触碰时可实现指示灯106的接通报警。
33.此外,根据本实用新型的实施例,如图4所示,滑动臂401上焊接有擦拭座402,且擦拭座402为环形结构,并且擦拭座402套接在指示灯106上,从而当滑动臂401和擦拭座402上下移动时可实现指示灯106的擦拭清洁。
34.此外,根据本实用新型的实施例,如图2所示,滑动臂401上焊接有挡环,且滑动臂401上套接有弹性件a403,并且弹性件a403组成了滑动臂401的弹性复位结构;滑动臂401头端为弧形结构,且滑动臂401头端与传送带2顶端面接触,并且滑动臂401与凸起201位置对正,从而当传送带2移动时在凸起201的拨动下可实现滑动臂401的上下运动,进而也就实现了指示灯106的擦拭清洁。
35.此外,根据本实用新型的实施例,如图1所示,检测臂501上焊接有挡环,且检测臂501上套接有弹性件b502,并且弹性件b502组成了检测臂501的弹性复位结构,从而可实现检测臂501的弹性复位。
36.此外,根据本实用新型的实施例,如图4所示,检测臂501的头端为球形结构,且检测臂501的头端与零件3之间的间距为0.5mm,并且检测臂501的尾端与接触开关之间的间距为0.5mm,从而当零件3高度过高时可挤压检测臂501进而实现了指示灯106的报警。
37.本实施例的具体使用方式与作用:
38.在放置零件3的时候,因传送带2顶端面左侧呈线性阵列状熔接有凸起201,且传送带2顶端面右侧也呈线性阵列状熔接有凸起201,并且左侧的凸起201和右侧凸起201均与零件3接触,从而可实现凸起201的限位固定;
39.当传送带2移动时,因检测臂501的头端为球形结构,且检测臂501的头端与零件3之间的间距为0.5mm,并且检测臂501的尾端与接触开关之间的间距为0.5mm,从而当零件3高度过高时可挤压检测臂501进而实现了指示灯106的报警;
40.与此同时,因滑动臂401上焊接有擦拭座402,且擦拭座402为环形结构,并且擦拭座402套接在指示灯106上,从而当滑动臂401和擦拭座402上下移动时可实现指示灯106的擦拭清洁;滑动臂401上焊接有挡环,且滑动臂401上套接有弹性件a403,并且弹性件a403组成了滑动臂401的弹性复位结构;滑动臂401头端为弧形结构,且滑动臂401头端与传送带2顶端面接触,并且滑动臂401与凸起201位置对正,从而当传送带2移动时在凸起201的拨动下可实现滑动臂401的上下运动,进而也就实现了指示灯106的擦拭清洁。
41.最后,需要说明的是,本实用新型在描述各个构件的位置及其之间的配合关系等
时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。
42.以上仅是本实用新型的示范性实施方式,而非用于限制本实用新型的保护范围,本实用新型的保护范围由所附的权利要求确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1