一种不占用空间的残障人群智能安全升降台阶
1.本实用新型属于助残辅助设备技术领域,特别是涉及一种不占用空间的残障人群智能安全升降台阶。
背景技术:
2.在很多居民小区以及公共场所,为了防水、分隔不同职能场所等目的,往往会在建筑门口设置一些短距离、阶数少的人行台阶,而这些人行台阶反而给需要乘坐轮椅的残障人群造成了通行上的不便。
3.为此,许多场所为了在建筑门口方便残障人群乘坐轮椅通行,会在原有的人行台阶上或两侧单独设置用于轮椅通行的坡道。但是,轮椅通行坡道的设置又会导致其他问题的出现,若轮椅通行坡道设计的过于平缓,虽然会使轮椅在坡道上通行更容易,但平缓的轮椅通行坡道会占用大量的门前空间,若轮椅通行坡道设计的过于陡峭,虽然可以节省门前空间,但陡峭的轮椅通行坡道会增加轮椅的通行难度,而且还会降低轮椅通行时的安全性。
技术实现要素:
4.针对现有技术存在的问题,本实用新型提供一种不占用空间的残障人群智能安全升降台阶,能够在人行台阶形态与升降台阶形态这两种形态间转换,在人行台阶形态下,可供行人正常通行,当乘坐轮椅的残障人士需要通行时,则可自动转换到升降台阶形态,用以辅助轮椅实现通行,实现了一机两用,与传统的轮椅通行坡道相比,不需要额外占用门前空间,并且在轮椅通行时可以有效保证通行安全性。
5.为了实现上述目的,本实用新型采用如下技术方案:一种不占用空间的残障人群智能安全升降台阶,包括箱体、下托板、上托板及升降台阶单元体;所述箱体采用顶端敞口的矩形结构,在台阶低处地面设置有基坑,所述箱体安装在基坑内,箱体上端面与台阶低处地面相平齐;所述下托板水平铺设在台阶低处地面上,下托板与箱体相铰接;所述上托板水平铺设在台阶高处地面上,上托板与箱体相铰接;所述升降台阶单元体数量若干,若干升降台阶单元体沿台阶走向顺序设置在箱体内;在所述下托板和上托板上均内置有压力传感器。
6.所述升降台阶单元体包括壳体、底座、台阶升降驱动电机、丝杠、丝母、第一台阶升降支杆、第二台阶升降支杆、下导轨滑槽、上导轨滑槽及支撑架;所述底座水平固装在箱体底板上;所述丝杠通过轴承座水平设置在底座上;所述台阶升降驱动电机水平固装在底座上,台阶升降驱动电机的电机轴通过联轴器与丝杠一端同轴固连;所述支撑架位于底座正上方,所述上导轨滑槽水平固装在支撑架下表面,上导轨滑槽与丝杠相平行;所述下导轨滑槽水平固装在底座上表面,下导轨滑槽与丝杠相平行;所述第一台阶升降支杆下端铰接在上导轨滑槽上,在上导轨滑槽内设置有上导向滚轮,上导向滚轮沿上导轨滑槽具有直线移动自由度,所述第一台阶升降支杆上端与上导向滚轮的中心轮轴相铰接;所述第二台阶升降支杆上端铰接在下导轨滑槽上,在下导轨滑槽内设置有下导向滚轮,下导向滚轮沿下导
轨滑槽具有直线移动自由度,所述第二台阶升降支杆下端与下导向滚轮的中心轮轴相铰接;所述第一台阶升降支杆与第二台阶升降支杆呈交叉分布结构,第一台阶升降支杆与第二台阶升降支杆在交汇点处相铰接;所述丝母套装在丝杠上,丝母与下导向滚轮的中心轮轴相铰接;所述壳体位于底座正上方,所述支撑架与壳体固定连接;当所述壳体与底座扣合在一起时,底座上方的所有零部件均位于壳体内部。
7.相邻所述升降台阶单元体的壳体之间分别设置有燕尾导轨和燕尾导向槽,燕尾导轨和燕尾导向槽沿竖直方向分布;所述燕尾导轨位于燕尾导向槽内,燕尾导轨沿燕尾导向槽具有直线移动自由度。
8.在所述升降台阶单元体的壳体与箱体之间留有升降护板机构;所述升降护板机构包括防护板、护板外罩、护板升降驱动电机、齿轮、弧形齿条、第一护板升降支杆、第二护板升降支杆、上导向滑轨及下导向滑轨;所述防护板位于护板外罩内;所述护板升降驱动电机水平固装在护板外罩底部,所述齿轮同轴固装在护板升降驱动电机的电机轴上;所述下导向滑轨水平固装在护板外罩底部,在下导向滑轨上设置有下导向滑块,下导向滑块沿下导向滑轨具有直线移动自由度;所述上导向滑轨位于下导向滑轨正上方,上导向滑轨水平固装在防护板上,在上导向滑轨上设置有上导向滑块,上导向滑块沿上导向滑轨具有直线移动自由度;所述弧形齿条固定安装在第一护板升降支杆下端,弧形齿条与齿轮相啮合,第一护板升降支杆与上导向滑块相铰接;所述第二护板升降支杆上端铰接在防护板上,第二护板升降支杆与下导向滑块相铰接;所述第一护板升降支杆与第二护板升降支杆呈交叉分布结构,第一护板升降支杆与第二护板升降支杆在交汇点处相铰接;所述升降护板机构的护板外罩固定连接在与台阶低处地面相邻的升降台阶单元体壳体上,护板外罩与该升降台阶单元体壳体的上端面相平齐,护板外罩与该升降台阶单元体壳体进行随动。
9.本实用新型的有益效果:
10.本实用新型的不占用空间的残障人群智能安全升降台阶,能够在人行台阶形态与升降台阶形态这两种形态间转换,在人行台阶形态下,可供行人正常通行,当乘坐轮椅的残障人士需要通行时,则可自动转换到升降台阶形态,用以辅助轮椅实现通行,实现了一机两用,与传统的轮椅通行坡道相比,不需要额外占用门前空间,并且在轮椅通行时可以有效保证通行安全性。
附图说明
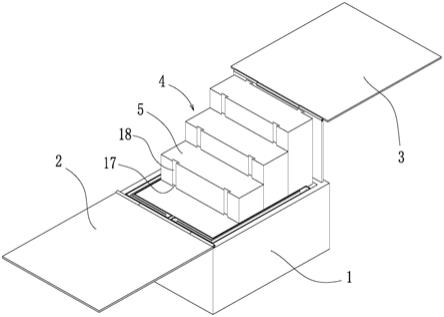
11.图1为本实用新型的一种不占用空间的残障人群智能安全升降台阶(人行台阶形态)的结构示意图;
12.图2为本实用新型的一种不占用空间的残障人群智能安全升降台阶(升降台阶形态的初始转换阶段)的结构示意图;
13.图3为本实用新型的一种不占用空间的残障人群智能安全升降台阶(升降台阶形态的中间转换阶段)的结构示意图;
14.图4为本实用新型的一种不占用空间的残障人群智能安全升降台阶(升降台阶形态的最终转换阶段)的结构示意图;
15.图5为本实用新型的升降台阶单元体(壳体未示出)的结构示意图;
16.图6为本实用新型的升降护板机构的结构示意图;
17.图中,1—箱体,2—下托板,3—上托板,4—升降台阶单元体,5—壳体,6—底座,7—台阶升降驱动电机,8—丝杠,9—丝母,10—第一台阶升降支杆,11—第二台阶升降支杆,12—下导轨滑槽,13—上导轨滑槽,14—支撑架,15—轴承座,16—联轴器,17—燕尾导轨,18—燕尾导向槽,19—防护板,20—护板外罩,21—护板升降驱动电机,22—齿轮,23—弧形齿条,24—第一护板升降支杆,25—第二护板升降支杆,26—上导向滑轨,27—下导向滑轨。
具体实施方式
18.下面结合附图和具体实施例对本实用新型做进一步的详细说明。
19.如图1~6所示,一种不占用空间的残障人群智能安全升降台阶,包括箱体1、下托板2、上托板3及升降台阶单元体4;所述箱体1采用顶端敞口的矩形结构,在台阶低处地面设置有基坑,所述箱体1安装在基坑内,箱体1上端面与台阶低处地面相平齐;所述下托板2水平铺设在台阶低处地面上,下托板2与箱体1相铰接;所述上托板3水平铺设在台阶高处地面上,上托板3与箱体1相铰接;所述升降台阶单元体4数量若干,若干升降台阶单元体4沿台阶走向顺序设置在箱体1内;在所述下托板2和上托板3上均内置有压力传感器。
20.所述升降台阶单元体4包括壳体5、底座6、台阶升降驱动电机7、丝杠8、丝母9、第一台阶升降支杆10、第二台阶升降支杆11、下导轨滑槽12、上导轨滑槽13及支撑架14;所述底座6水平固装在箱体1底板上;所述丝杠8通过轴承座15水平设置在底座6上;所述台阶升降驱动电机7水平固装在底座6上,台阶升降驱动电机7的电机轴通过联轴器16与丝杠8一端同轴固连;所述支撑架14位于底座6正上方,所述上导轨滑槽13水平固装在支撑架14下表面,上导轨滑槽13与丝杠8相平行;所述下导轨滑槽12水平固装在底座6上表面,下导轨滑槽12与丝杠8相平行;所述第一台阶升降支杆10下端铰接在上导轨滑槽13上,在上导轨滑槽13内设置有上导向滚轮,上导向滚轮沿上导轨滑槽13具有直线移动自由度,所述第一台阶升降支杆10上端与上导向滚轮的中心轮轴相铰接;所述第二台阶升降支杆11上端铰接在下导轨滑槽12上,在下导轨滑槽12内设置有下导向滚轮,下导向滚轮沿下导轨滑槽12具有直线移动自由度,所述第二台阶升降支杆11下端与下导向滚轮的中心轮轴相铰接;所述第一台阶升降支杆10与第二台阶升降支杆11呈交叉分布结构,第一台阶升降支杆10与第二台阶升降支杆11在交汇点处相铰接;所述丝母9套装在丝杠8上,丝母9与下导向滚轮的中心轮轴相铰接;所述壳体5位于底座6正上方,所述支撑架14与壳体5固定连接;当所述壳体5与底座6扣合在一起时,底座6上方的所有零部件均位于壳体5内部。
21.相邻所述升降台阶单元体4的壳体5之间分别设置有燕尾导轨17和燕尾导向槽18,燕尾导轨17和燕尾导向槽18沿竖直方向分布;所述燕尾导轨17位于燕尾导向槽18内,燕尾导轨17沿燕尾导向槽18具有直线移动自由度。
22.在所述升降台阶单元体4的壳体5与箱体1之间留有升降护板机构;所述升降护板机构包括防护板19、护板外罩20、护板升降驱动电机21、齿轮22、弧形齿条23、第一护板升降支杆24、第二护板升降支杆25、上导向滑轨26及下导向滑轨27;所述防护板19位于护板外罩20内;所述护板升降驱动电机21水平固装在护板外罩20底部,所述齿轮22同轴固装在护板升降驱动电机21的电机轴上;所述下导向滑轨27水平固装在护板外罩20底部,在下导向滑轨27上设置有下导向滑块,下导向滑块沿下导向滑轨27具有直线移动自由度;所述上导向
滑轨26位于下导向滑轨27正上方,上导向滑轨26水平固装在防护板19上,在上导向滑轨26上设置有上导向滑块,上导向滑块沿上导向滑轨26具有直线移动自由度;所述弧形齿条23固定安装在第一护板升降支杆24下端,弧形齿条23与齿轮22相啮合,第一护板升降支杆24与上导向滑块相铰接;所述第二护板升降支杆25上端铰接在防护板19上,第二护板升降支杆25与下导向滑块相铰接;所述第一护板升降支杆24与第二护板升降支杆25呈交叉分布结构,第一护板升降支杆24与第二护板升降支杆25在交汇点处相铰接;所述升降护板机构的护板外罩20固定连接在与台阶低处地面相邻的升降台阶单元体4壳体5上,护板外罩20与该升降台阶单元体4壳体5的上端面相平齐,护板外罩20与该升降台阶单元体4壳体5进行随动。
23.下面结合附图说明本实用新型的一次使用过程:
24.在正常使用时,本实用新型则处于人行台阶形态,在此形态下,所有升降台阶单元体4由低到高顺序排列,形成可供行人正常行走的步行阶梯,且最低处的升降台阶单元体4壳体5的上端面与下托板2相平齐。
25.当载有残障人士的轮椅行驶到下托板2上时,由于轮椅无法继续通行,则轮椅及残障人士的总重量会持续施加给下托板2,而下托板2上的压力传感器会检测到持续且恒定的总压力,此时本实用新型会根据压力检测结果自动启动状态转换,并转换到升降台阶形态。
26.当本实用新型启动状态转换后,除了最低处的升降台阶单元体4不执行动作外,其他升降台阶单元体4全部执行下降动作,对于任意一个升降台阶单元体4来说,在执行下降动作时,首先启动台阶升降驱动电机7,由台阶升降驱动电机7带动丝杠8反向转动,而丝杠8的旋转运动会同步转换为丝母9的直线运动,并使丝母9逐渐远离台阶升降驱动电机7,随着丝母9的移动,会同步带动下导向滚轮沿着下导轨滑槽12移动,而下导向滚轮又会带动第二台阶升降支杆11做向下摆转运动,最终带动支撑架14和壳体5向下移动,而第一台阶升降支杆10会在支撑架14向下移动的同时进行随动,直到壳体5上端面与下托板2相平齐。
27.当所有升降台阶单元体4壳体5的上端面均与下托板2相平齐后,就可以继续控制轮椅行驶到升降台阶单元体4上,随着轮椅的驶离,下托板2上的压力传感器会检测到压力消失,且当压力消失五秒后,防护板19执行升起动作,且在防护板19执行升起动作时,首先启动护板升降驱动电机21,带动齿轮22正向转动,进入带动与之啮合的弧形齿条23移动,通过移动的弧形齿条23会带动第一护板升降支杆24做向上摆转运动,第一护板升降支杆24上端借助上导向滑块沿着上导向滑轨26进行滑动,最终带动防护板19向上移动,而第二护板升降支杆25会在防护板19向上移动的同时进行随动,直到防护板19向上升起到指定高度。
28.当防护板19升起后,所有升降台阶单元体4同步执行上升动作,对于所有升降台阶单元体4来说,首先启动台阶升降驱动电机7,由台阶升降驱动电机7带动丝杠8正向转动,而丝杠8的旋转运动会同步转换为丝母9的直线运动,并使丝母9逐渐靠近台阶升降驱动电机7,随着丝母9的移动,会同步带动下导向滚轮沿着下导轨滑槽12移动,而下导向滚轮又会带动第二台阶升降支杆11做向上摆转运动,最终带动支撑架14和壳体5向上移动,而第一台阶升降支杆10会在支撑架14向上移动的同时进行随动,直到壳体5上端面与上托板3相平齐。
29.当所有升降台阶单元体4的壳体5上端面与上托板3相平齐后,轮椅就可以驶离升降台阶单元体4并经过上托板3后驶入高处地面。当轮椅途径上托板3后,会由上托板3上的压力传感器检测到一个短时的压力信号,在轮椅离开上托板3时,压力信号消失,待压力信
号消失五秒后,本实用新型再次启动状态转换,并转换到人行台阶形态,且在状态转换时,首先控制防护板19下降到初始位置,之后除最高处的升降台阶单元体4不执行下降动作外,其他升降台阶单元体4全部执行下降动作,直到将升降台阶单元体4恢复到可供行人正常行走的步行阶梯。
30.实施例中的方案并非用以限制本实用新型的专利保护范围,凡未脱离本实用新型所为的等效实施或变更,均包含于本案的专利范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1