一种起重机自动纠偏系统的制作方法
1.本实用新型属于门式起重机改造自动纠偏技术领域,具体涉及一种起重机自动纠偏系统。
背景技术:
2.门式起重机是桥式起重机的一种变形,又叫龙门吊。主要用于室外的货场、料场货、散货的装卸作业。门式起重机具有场地利用率高、作业范围大、适应面广、通用性强等特点,在港口货场得到广泛使用。
3.它的金属结构像门形框架,承载主梁下安装两个支撑腿,两个支撑腿分别为刚性支撑腿和柔性支撑腿,刚性支撑腿为一根大型钢柱,其贴地的支撑脚很宽大,整体像一个倒立的“t”字;柔性支撑腿为三角形,且三角形的两个边比单独的刚性支撑腿的钢柱要细得多,两支撑腿可以直接在地面的轨道上行走,以带动承载主梁完成重物的搬运。
4.但两条支撑腿的速度不可能完全一样,必然会有偏差,所以在门式起重机进行动作时要进行偏差纠正,但目前门式起重机的纠偏操作依然依靠人力完成:操作人员在驾驶室操作起重机进行手动纠偏或半自动纠偏作业,作业反应速度较慢,作业精度较低。
技术实现要素:
5.本实用新型提供了一种起重机自动纠偏系统,为起重机的纠偏作业提供一种自动纠偏系统代替人力操作进行纠偏,提高起重机的纠偏反应速度和纠偏精度。
6.为达到上述目的,本实用新型通过以下技术方案实现:
7.一种起重机自动纠偏系统,包括通讯连接的数据采集装置、控制器和调节装置,所述数据采集装置包括前后偏差数据采集装置和左右偏差数据采集装置,所述前后偏差数据采集装置包括绝对值编码器,所述刚性支撑腿和柔性支撑腿均设置绝对值编码器,用于获取其所属支撑腿的行走距离参数。
8.所述左右偏差数据采集装置包括测距传感器组,所述刚性支撑腿和柔性支撑腿均设置测距传感器组,所述测距传感器组包括多个测距传感器,多个所述测距传感器共线设置,多个所述传感器所在直线与其所属支撑腿运动所依据的轨道平行,所述测距传感器用于获取其所属支撑腿与轨道之间的距离;
9.所述调节装置包括变频器和电机,所述变频器连接电机,用于控制电机的转速,所述刚性支撑腿和柔性支撑腿均设置电机,用于带动其所属支撑腿动作。
10.进一步地,所述测距传感器组至少包括两个测距传感器,各所述支撑腿沿轨道运动的两个端部均设置测距传感器。
11.进一步地,所述控制器外接有转接装置,用于连接数据采集装置和调节装置,所述转接装置包括dp模块和模拟量输入模块,所述绝对值编码器连接dp模块,通过dp模块连通控制器;所述测距传感器连接模拟量输入模块,通过模拟量输入模块连通控制器;所述变频器连接dp模块,通过dp模块连接控制器。
12.进一步地,所述控制器连接有触摸屏,用于显示数据采集装置获取的数据。
13.进一步地,所述控制器连接有大车手柄和用于控制控制器工作状态的工作转换开关。
14.进一步地,所述工作转换开关包括自动纠偏模式开关、手动纠偏模式开关和0位。
15.与现有技术相比,本实用新型的有益效果是:本实用新型提供的起重机自动纠偏系统,通过数据采集装置获取起重机刚性支撑腿和柔性支撑腿的左右偏差数据和前后偏差数据并输入到控制器中,经控制器加工后输出控制信号至调节装置,通过调节装置进行起重机的偏差纠正,本实用新型提供以上的一种自动纠偏系统,代替人力操作进行纠偏,可有效提高纠偏作业的反应速度和纠偏精度,使得起重机运动更加可靠安全。
附图说明
16.图1为本实用新型实施例提供的一种起重机自动纠偏系统的结构示意图;
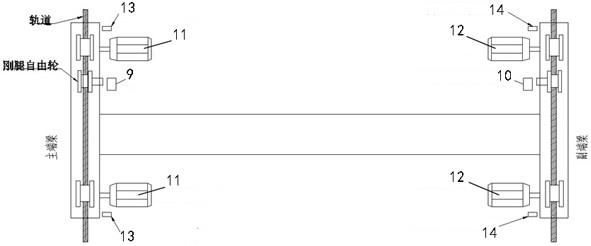
17.图2为本实用新型实施例提供的一种起重机自动纠偏系统中刚腿绝对值编码器、柔腿绝对值编码器、刚腿电机、柔腿电机、刚腿测距传感器、柔腿测距传感器的安装示意图;
18.图3为本实用新型实施例提供的一种起重机自动纠偏系统中控制器的接线引脚图;
19.图4为本实用新型实施例提供的一种起重机自动纠偏系统中控制器、dp模块和模拟量输入模块的主视图;
20.图5 为本实用新型实施例提供的一种起重机自动纠偏系统中dp总线控制原理图;
21.图6为本实用新型实施例提供的一种起重机自动纠偏系统中刚腿变频器和刚腿电机的接线示意图;
22.图7为本实用新型实施例提供的一种起重机自动纠偏系统中柔腿变频器和柔腿电机的接线示意图;
23.图8为本实用新型实施例提供的一种起重机自动纠偏系统中模拟量输入模块、刚腿测距传感器和柔腿测距传感器的接线示意图。
24.图中:1、大车手柄;2、工作转换开关;3、控制器;4、dp模块;5、模拟量输入模块;6、触摸屏;7、刚腿变频器;8、柔腿变频器;9、刚腿绝对值编码器;10、柔腿绝对值编码器;11、刚腿电机;12、柔腿电机;13、刚腿测距传感器;14、柔腿测距传感器。
具体实施方式
25.下面将结合本发明中的附图,对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动条件下所获得的所有其它实施例,都属于本发明保护的范围。
26.本实用新型提供一种起重机自动纠偏系统,如图1至图8所示,包括通讯连接的数据采集装置、控制器3和调节装置,数据采集装置用于获取刚性支撑腿和柔性支撑腿在运动过程中的偏差数据并将其输入到控制器3中;控制器3中设置有用于纠正偏差的控制策略,控制器3用于接收数据采集装置获取的偏差数据,并将其导入控制策略中,经控制策略处理后输出控制命令到调节装置;调节装置用于接收并执行控制器3输出的控制信号,完成起重
机的纠偏作业。本实用新型为起重机的纠偏作业提供一种自动纠偏系统,代替人力操作进行纠偏,提高了起重机的纠偏反应速度和纠偏精度,可有效保证起重机的安全可靠运行。
27.本实用新型的实施例中,如图1、图3至图8所示,控制器3可选用电脑、plc、单片机等具有程序存储计算控制功能的处理器,本实施例中控制器3优选用型号为6es7-214-1ag40-0xb0的plc控制器;控制器3外接有dp模块4和模拟量输入模块5,dp模块4和模拟量输入模块5的数量依据实际工程设计决定,用于完成控制器3与数据采集装置和调节装置的连接,本实施例中dp模块4型号优选为6gk7 243-5dx30-0xe0,模拟量输入模块5型号优选为231-4hf30-0xb0;控制器3连接工作转换开关2和大车手柄1,工作转换开关2用于控制控制器3进行纠偏状态的切换,工作转换开关2的模式切换包括自动纠偏模式开关、手动纠偏模式开关和0位,三个模式在控制器3中做互锁处理,在进行模式切换时,纠偏系统的所有装置均处于停止状态;大车手柄1的控制信号可传入控制器3,控制器3中设置正反向互锁电路和滤波电路用于处理大车手柄1输入的控制信号,避免出现误动作。
28.本实用新型的实施例中,如图1至图8所示,数据采集装置包括前后偏差数据采集装置和左右偏差数据采集装置,前后偏差数据采集装置用于获取刚性支撑腿和柔性支撑腿的前后偏移数据,前后偏差采集装置包括刚腿绝对值编码器9和柔腿绝对值编码器10,刚腿绝对值编码器9设置于刚性支撑腿的自由轮,用于获取刚性支腿的行走距离,并传输到控制器3中;柔腿绝对值编码器10设置于柔性支撑腿的自由轮,用于获取柔性支撑腿的行走距离;本实用新型的实施例中,刚腿绝对值编码器9和柔腿绝对值编码器10型号优选为pvm58n-011agrobn-1213,刚腿绝对值编码器9和柔腿绝对值编码器10连接dp模块4,通过dp模块4连接控制器3,刚腿绝对值编码器9和柔腿绝对值编码器10采集的前后偏差信号通过dp模块4进行通讯协议的转换,转换为控制器3所使用的通讯协议,方便控制器3识别,然后将转换后的控制器3可识别的信号通入控制器3中。
29.本实用新型的实施例中,如图1至图8所示,左右偏差数据采集装置包括多个刚腿测距传感器13和多个柔腿测距传感器14,本实用新型的实施例中优选设置两个刚腿测距传感器13和两个柔腿测距传感器14,两刚腿测距传感器13分别设置于刚性支撑腿运动方向的两个端部,两所述刚腿测距传感器13的连线与刚性支撑腿运动所依据的轨道平行,用于测量刚性支撑腿的两端与轨道之间的距离,以获取刚性支撑腿的左右偏移量,并将其传输至控制器3;两柔腿测距传感器14分别设置于柔性支撑腿运动方向的两个端部,两柔腿测距传感器14的连线与柔性支撑腿运动所依据的轨道平行,用于测量柔性支撑腿的两端与轨道之间的距离,以获得柔性支撑腿的左右偏移量,并将其传输至控制器3。本实用新型的实施例中,刚腿测距传感器13和柔腿测距传感器14型号优选为vdm18-300-105,刚腿距离传感器和柔腿距离传感器连接模拟量输入模块5,通过模拟量输入模块5连接控制器3。
30.本实用新型的实施例中,如图1至图8所示,调节装置包括刚腿调节装置和柔腿调节装置,刚腿调节装置包括刚腿变频器7和刚腿电机11,刚腿变频器7通讯连接控制器3和刚腿电机11,刚腿变频器7接收控制器3输出的控制信号,依据控制信号调整刚腿电机11的转速,以调节刚腿电机11的运动速度,调节刚性支撑腿的运动速度;柔性调节装置包括柔腿变频器8和柔腿电机12,柔腿变频器8通讯连接控制器3和柔腿电机12,柔腿变频器8接收控制器3输出的控制信号,依据控制信号调整柔腿电机12的转速,以调节柔腿电机12的运动速度,调节柔性支撑腿的运动速度。
31.控制器3依据接收到的左右偏差数据和前后偏差数据通过控制策略得出控制数据,并输入到刚腿变频器7和柔腿变频器8,通过刚腿电机11和柔腿电机12协调控制刚性支撑腿和柔性支撑腿的运行速度,以达到纠偏的效果;本实用新型的实施例中,刚腿变频器7和柔腿变频器8的型号优选为cimr-ab4a0165。
32.本实用新型的实施例中,如图1所示,控制器3外接有触摸屏6,控制器3将采集的偏差数据实时导入触摸屏6,供工作人员观看参考。
33.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1