一种履带吊力矩限制器的制作方法
1.本实用新型涉及限制器技术领域,具体为一种履带吊力矩限制器。
背景技术:
2.履带吊是一种大型起重设备,可吊起各种东西,如果吊起东西的重量超过了规定的重量,则会出现安全事故,起重机钢丝绳断裂,起重机侧翻等,造成很大的损失。
3.履带吊主臂和副臂可以变化角度,随之幅度也会产生变化,履带吊设计出厂时会自带一份起重性能表,规定了在不同幅度下可以起吊的最大起重量,这个最大起重量就是额定起重量,由此可见履带吊在不同幅度下可以起吊的最大起重量是不同的,力矩限制器把起重机的起重性能表下载到显示器主机里面,再通过各传感器检测,判断实际起重量有没有超过额定起重量,如果没超过则是安全的可以继续吊起,仪表会显示实际吊起的重量,大臂的角度,作业幅度等。如果超过了,则会发出报警声音,并且输出控制信号,不让起重机继续起吊。
4.现今,市场上的此类装置种类繁多,基本可以满足人们的使用需求,但是依然存在一定的问题,但是,现有的履带吊力矩限制器无法检测吊钩的状态,实用性不强。
技术实现要素:
5.本实用新型的目的在于提供一种履带吊力矩限制器以解决上述背景技术中提出的无法检测吊钩的状态的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种履带吊力矩限制器,包括底部机体,所述底部机体顶部的中心位置活动设置有旋转盘,所述旋转盘的顶部设置有顶部机体,所述顶部机体右端的内部设置有主机显示器,所述顶部机体的顶部活动设置有主臂本体,所述主臂本体的顶部通过轴活动有副臂本体,所述副臂本体内部靠近顶部的位置固定有主钩高度限位器,所述副臂本体内部靠近主钩高度限位器的顶部设置有副钩高度限位器,所述副臂本体内部的顶部固定有副臂前端接线盒,所述副臂本体内部靠近底部的位置活动设置有副臂后端卷筒。
7.优选的,所述主臂本体顶部的两侧活动设置有钢丝导轮,所述主臂本体顶部的左侧活动设置有第二侧臂,所述副臂本体底部的右侧活动设置有第一侧臂。
8.优选的,所述主臂本体内部的顶部固定有主臂前端接线盒,所述主臂本体内部靠近主臂前端接线盒的底部位置固定有风速传感器,所述主臂本体内部靠近风速传感器底部的右侧固定有主高限位开关,所述副臂本体内部靠近底部的位置固定有副臂角度传感器,风速传感器起到了检测风速的作用。
9.优选的,所述主臂本体内部靠近主高限位开关的底部固定有副高限位开关,所述主臂本体内部靠近顶部的左侧固定有顶部副重量传感器,所述主臂本体内部靠近顶部副重量传感器的底部固定有顶部主重量传感器,顶部主重量传感器检测装置的重量。
10.优选的,所述主臂本体内部底部的右侧固定有主臂后端接线盒,所述主臂本体内
部底部靠近主臂后端接线盒的顶部固定有主臂角度传感器,主臂后端接线盒可以方便接线。
11.优选的,所述主臂本体内部靠近底部的中心位置固定有主臂后端卷筒,所述主臂本体内部的底部靠近左侧固定有底部副重量传感器,所述主臂本体内部的底部靠近底部副重量传感器的顶部固定有底部主重量传感器。
12.优选的,所述主钩高度限位器和副钩高度限位器通过导线与副臂前端接线盒相互连接,所述副臂前端接线盒和副臂后端卷筒通过导线相互连接,所述副臂前端接线盒上通过导线缠绕在副臂后端卷筒上并连接到主臂前端接线盒上,副臂后端卷筒方便导线的传动。
13.优选的,所述风速传感器、副臂角度传感器、主高限位开关、副高限位开关、顶部副重量传感器和顶部主重量传感器通过导线与主臂前端接线盒相互连接,所述底部主重量传感器、底部副重量传感器、主臂角度传感器和主机显示器通过导线与主臂后端接线盒相互连接,所述主臂后端接线盒上通过导线缠绕在主臂后端卷筒上并连接到主臂前端接线盒上。
14.与现有技术相比,本实用新型的有益效果是:该履带吊力矩限制器结构合理,具有以下优点:
15.(1)通过设置有主钩高度限位器、副钩高度限位器、副臂前端接线盒和副臂后端卷筒实现了装置可以检测吊钩的状态,因此,使用时,通过在副臂本体上设置有主钩高度限位器和副钩高度限位器,主钩高度限位器和副钩高度限位器分别检测主吊钩和副吊钩的距离,从而把数据反馈到主机显示器中,从而实时检测数据,实用性强。
16.(2)通过设置有风速传感器、副臂角度传感器和主臂角度传感器实时检测主臂本体和副臂本体之间的角度,防止主臂本体和副臂本体角度跨度过大导致发生危险,因此,使用时,通过设置有风速传感器,风速传感器检测环境中的风速,当检测到风速过大时,停止使用履带吊,通过副臂角度传感器检测副臂本体的角度,从而防止副臂本体的跨度过大,通过主臂角度传感器检测主臂本体的角度,从而防止主臂本体的跨度过大,从而提高了履带吊的安全性。
17.(3)通过设置有主高限位开关、副高限位开关、顶部副重量传感器、顶部主重量传感器、底部主重量传感器和底部副重量传感器实现了进一步提高履带的安全性,因此设置有主高限位开关和副高限位开关,检测副臂本体的伸长的长度,从而实施监控,防止主臂本体伸的过长导致履带吊发生危险,通过设置有顶部副重量传感器、顶部主重量传感器、底部主重量传感器和底部副重量传感器检测装置的重量,防止履带吊过载发生危险。
附图说明
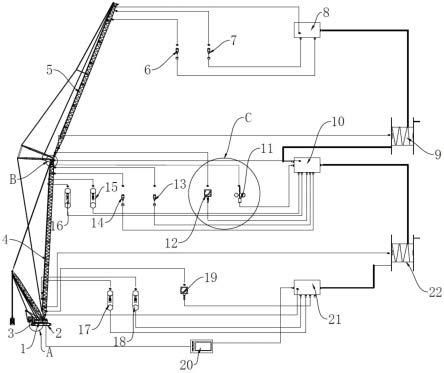
18.图1为本实用新型的正视安装时结构示意图;
19.图2为本实用新型的正视外部结构示意图;
20.图3为本实用新型的图1中a处放大结构示意图;
21.图4为本实用新型的图1中b处放大结构示意图;
22.图5为本实用新型的图1中c处放大结构示意图。
23.图中:1、旋转盘;2、底部机体;3、顶部机体;4、主臂本体;5、副臂本体;6、主钩高度
限位器;7、副钩高度限位器;8、副臂前端接线盒;9、副臂后端卷筒;10、主臂前端接线盒;11、风速传感器;12、副臂角度传感器;13、主高限位开关;14、副高限位开关;15、顶部副重量传感器;16、顶部主重量传感器;17、底部主重量传感器;18、底部副重量传感器;19、主臂角度传感器;20、主机显示器;21、主臂后端接线盒;22、主臂后端卷筒;23、第一侧臂;24、第二侧臂;25、钢丝导轮。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.请参阅图1-5,本实用新型提供的一种实施例:一种履带吊力矩限制器,包括底部机体2,所述底部机体2顶部的中心位置活动设置有旋转盘1,所述旋转盘1的顶部设置有顶部机体3,所述顶部机体3右端的内部设置有主机显示器20,所述顶部机体3的顶部活动设置有主臂本体4,主臂本体4进行支撑的作用,所述主臂本体4的顶部通过轴活动有副臂本体5,副臂本体5起到了支撑的作用,所述副臂本体5内部靠近顶部的位置固定有主钩高度限位器6,主钩高度限位器6控制主吊钩的位置,所述副臂本体5内部靠近主钩高度限位器6的顶部设置有副钩高度限位器7,副钩高度限位器7起到了控制副钩的位置,所述副臂本体5内部的顶部固定有副臂前端接线盒8,副臂前端接线盒8实现了连接导线的作用,所述副臂本体5内部靠近底部的位置活动设置有副臂后端卷筒9;
26.通过在副臂本体5上设置有主钩高度限位器6和副钩高度限位器7,主钩高度限位器6和副钩高度限位器7分别检测主吊钩和副吊钩的距离,从而把数据反馈到主机显示器20中,从而实时检测数据,实用性强;
27.所述主臂本体4顶部的两侧活动设置有钢丝导轮25,钢丝导轮25对钢丝进行导向的作用,所述主臂本体4顶部的左侧活动设置有第二侧臂24,所述副臂本体5底部的右侧活动设置有第一侧臂23,所述主臂本体4内部的顶部固定有主臂前端接线盒10,主臂前端接线盒10可以方便连接导线,所述主臂本体4内部靠近主臂前端接线盒10的底部位置固定有风速传感器11,风速传感器11可以检测环境中的风速,所述主臂本体4内部靠近风速传感器11底部的右侧固定有主高限位开关13,所述副臂本体5内部靠近底部的位置固定有副臂角度传感器12;
28.通过设置有风速传感器11,风速传感器11检测环境中的风速,当检测到风速过大时,停止使用履带吊,通过副臂角度传感器12检测副臂本体5的角度,从而防止副臂本体5的跨度过大,通过主臂角度传感器19检测主臂本体4的角度,从而防止主臂本体4的跨度过大,从而提高了履带吊的安全性;
29.所述主臂本体4内部靠近主高限位开关13的底部固定有副高限位开关14,所述主臂本体4内部靠近顶部的左侧固定有顶部副重量传感器15,所述主臂本体4内部靠近顶部副重量传感器15的底部固定有顶部主重量传感器16,所述主臂本体4内部底部的右侧固定有主臂后端接线盒21,所述主臂本体4内部底部靠近主臂后端接线盒21的顶部固定有主臂角度传感器19;
30.所述主臂本体4内部靠近底部的中心位置固定有主臂后端卷筒22,所述主臂本体4
内部的底部靠近左侧固定有底部副重量传感器18,所述主臂本体4内部的底部靠近底部副重量传感器18的顶部固定有底部主重量传感器17;
31.所述主钩高度限位器6和副钩高度限位器7通过导线与副臂前端接线盒8相互连接,所述副臂前端接线盒8和副臂后端卷筒9通过导线相互连接,所述副臂前端接线盒8上通过导线缠绕在副臂后端卷筒9上并连接到主臂前端接线盒10上,所述风速传感器11、副臂角度传感器12、主高限位开关13、副高限位开关14、顶部副重量传感器15和顶部主重量传感器16通过导线与主臂前端接线盒10相互连接,所述底部主重量传感器17、底部副重量传感器18、主臂角度传感器19和主机显示器20通过导线与主臂后端接线盒21相互连接,所述主臂后端接线盒21上通过导线缠绕在主臂后端卷筒22上并连接到主臂前端接线盒10上。
32.设置有主高限位开关13和副高限位开关14,检测副臂本体5的伸长的长度,从而实施监控,防止主臂本体4伸的过长导致履带吊发生危险,通过设置有顶部副重量传感器15、顶部主重量传感器16、底部主重量传感器17和底部副重量传感器18检测装置的重量,防止履带吊过载发生危险。
33.本技术实施例在使用时,通过把各个传感器分别安装到主臂本体4和副臂本体5上,通过设置有主钩高度限位器6检测主吊钩的位置,通过副钩高度限位器7检测副吊钩的位置,通过风速传感器11可以检测环境中的风速,当检测到风速过大时,停止使用履带吊,然后设置有主高限位开关13和副高限位开关14,检测副臂本体5的伸长的长度,通过副臂角度传感器12检测副臂本体5的角度,从而防止副臂本体5的跨度过大,通过主臂角度传感器19检测主臂本体4的角度,从而防止主臂本体4的跨度过大,从而提高了履带吊的安全性,通过设置有顶部副重量传感器15、顶部主重量传感器16、底部主重量传感器17和底部副重量传感器18检测装置的重量,防止履带吊过载发生危险,通过副臂后端卷筒9和主臂后端卷筒22可以使线缆方便传动,防止线缆被拉断,通过设置有副臂前端接线盒8、主臂前端接线盒10和主臂后端接线盒21可以方便连接各种导线,且主机显示器20采用横式一体结构设计,产品结构紧凑,总体美观,彩色图形显示,在显示屏上用图形及汉字(英文)实时显示起重机额定负荷、实际负荷、变幅、臂长、角度,倍率、时间等,声光报警、自动控制;全软件设置,使安装调试方法更简单,数据更准确;起重绳倍率、主臂、副臂工作方式手动设置;起重机“黑匣子”功能,可实时自动存储起重机工作状态,存储信息量达30000条,为用户自已分析吊车意外事故提供第一手资料和科学依据;产品防水、防潮、防雷击、抗干扰。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1