流体容器管理系统的制作方法
本公开涉及一种系统,该系统有助于将流体容器手动引入到处理仪器、存储容器、传送每个容器的受控量的内容物、监测每个容器内所包含的流体的量、以及一旦每个容器为空或不再使用所述容器就丢弃每个容器。
背景技术:
1、自动样品处理系统经常需要补充过程流体,诸如试剂,和/或需要向系统提供不同的过程流体以便使系统能够执行不同的过程。在自动系统中,停止系统的运行可能会对效率和吞吐量产生负面影响。然而,由于许多此类处理系统的封闭性质和系统内移动部件的数量,在系统运行时并且在不停止系统的运行的情况下向系统提供过程流体的附加容器是一个挑战。
2、发明概述
3、下文提供简化概述以提供对本文所描述的一些方面的基本理解。此概述并非所要求保护的主题的详尽综述。其既不意图识别所要求保护的主题的关键或决定性要素,也不划定所要求保护的主题的范围。其唯一目的是以简化形式提供一些概念作为随后提供的更详细描述的序言。
4、本文所述的示例包括一种用于传送容器的系统,该容器包括形成在该容器的相对侧上的凹槽。该系统可以包括容器装载接口、容器存储模块和容器分配器,该容器分配器被构造成将容器从容器装载接口传送到容器存储模块。该容器装载接口可以包括可以能够在可接近位置与不可接近位置之间移动的可移动支撑平台,以及支撑在可移动支撑平台上的容器装载运输件。容器装载运输件可以包括多个容器凹穴,每个容器凹穴被构造成当可移动支撑平台可以处于可接近位置时接纳竖直插入容器凹穴中的容器,并且准许容器从容器凹穴横向移除,其中容器装载运输件可以被构造成当可移动支撑平台可以处于不可接近位置时相对于形成在可移动支撑平台中的传送开口将容器凹穴顺序地运输到容器传送位置。容器存储模块可以包括:外壳,该外壳具有形成在该外壳的侧面的容器进入/脱离开口;可移动屏障,该可移动屏障被构造成在阻挡容器进入/脱离开口的第一位置与准许容器横向移动穿过容器进入/脱离开口的第二位置之间移动;以及容器存储运输件,该容器存储运输件被设置在外壳内并包括多个容器固持站。每个容器固持站可以包括弹簧片,这些弹簧片被构造成弹性地接合容器固持站中所固持的容器的凹槽,以将容器保持在容器固持站中,并且向外偏转以准许容器横向插入容器固持站中或从其横向移除。容器分配器可以包括:容器夹持器,该容器夹持器被构造成通过接合容器的凹槽来抓握位于容器传送位置的容器装载运输件的容器凹穴中的一个中所承载的容器;夹持器推进系统,该夹持器推进系统被构造成移动容器夹持器以将容器从其中固持有容器的容器装载运输件的容器凹穴中横向移除;以及分配器移动系统,该分配器移动系统被构造成将容器夹持器和由其固持的容器从容器传送位置移动到容器存储模块的进入/脱离开口。夹持器推进系统可以被构造成移动容器夹持器以将由其固持的容器插入穿过进入/脱离开口并进入容器存储运输件的容器固持站,并且夹持器可以被构造成通过将容器的凹槽脱离接合来在容器固持站中释放容器。
5、在一些示例中,容器装载接口的可移动支撑平台可以包括抽屉,该抽屉可以能够在其中可移动支撑平台可以缩回到仪器中的不可接近位置与其中可移动支撑平台可以从仪器延伸的可接近位置之间移动。
6、在一些示例中,容器装载运输件可以包括装载转盘,该装载转盘被支撑在可移动支撑平台上以围绕装载转盘轴线旋转,并且容器凹穴围绕装载转盘轴线周向布置。
7、在一些示例中,装载接口可以附加地或替代性地包括用于检测装载转盘的原始旋转位置的原位传感器。
8、在一些示例中,每个容器凹穴可以包括保持夹,这些保持夹被构造成接合形成在容器上的凹槽,以将容器可移除地保持在容器凹穴内。
9、在一些示例中,容器凹穴被设置在装载转盘的外周边上,并且在装载转盘的外周边处开放,以准许容器在相对于装载转盘轴线的横向方向上从凹穴取出。
10、在一些示例中,每个容器凹穴可以包括形成在容器凹穴的开放周边端部的相对侧上的凸纹,以为夹持机构打开以将容器凹穴内所固持的容器的凹槽接合或脱离接合提供间隙。
11、在一些示例中,每个容器凹穴可以包括容器定位夹板,该容器定位夹板被构造成接合形成在定位在容器凹穴内的容器中的凹口。
12、在一些示例中,容器装载接口可以包括扫描器,该扫描器被配置成扫描关于容器装载运输件上所承载的每个容器的机器可读信息。
13、在一些示例中,扫描器可以包括条形码扫描器。
14、在一些示例中,容器装载接口可以附加地或替代性地包括装载运输马达,该装载运输马达耦接到装载转盘以实现装载转盘围绕装载转盘轴线的动力旋转。
15、在一些示例中,装载运输马达可以通过传动带耦接到装载转盘。
16、在一些示例中,容器存储模块可以附加地或替代性地包括从可移动屏障延伸的推动器销,容器分配器可以包括被构造成接合推动器销的门致动器臂,并且门致动器臂可以能够由分配器移动系统移动以将容器存储模块的可移动屏障从第一位置移动到第二位置。
17、在一些示例中,容器存储运输件可以包括存储转盘,该存储转盘被支撑在外壳内以围绕存储转盘轴线旋转,并且容器固持站可以围绕存储转盘轴线周向布置。
18、在一些示例中,容器存储运输件可以包括用于检测存储转盘的原始旋转位置的原位传感器。
19、在一些示例中,存储转盘可以附加地或替代性地包括包含多对相对的、面对的弹簧片的上部夹环和包含多对相对的、面对的弹簧片的下部夹环,并且上部夹环的每对弹簧片可以与下部夹环的对应的一对弹簧片对准,以限定每个固持站。
20、在一些示例中,每个弹簧片可以包括向内弯曲到对应固持站中的转向节,并且每个转向节可以安置到设置在固持站中的容器的凹槽中的一个中。
21、在一些示例中,上部夹环可以与下部夹环间隔开,使得上部夹环的每对弹簧片可以与下部夹环的对应的一对弹簧片间隔开。
22、在一些示例中,容器存储模块可以附加地或替代性地包括存储运输马达,该存储运输马达耦接到存储转盘以实现存储转盘围绕存储转盘轴线的动力旋转。
23、在一些示例中,存储运输马达可以通过安装到转盘并与安装在存储运输马达的输出轴杆上的正齿轮接合的正齿轮耦接到存储转盘。
24、在一些示例中,容器夹持器附加地或替代性地可以包括:夹持器元件安装支架;第一夹持器元件,该第一夹持器元件安装到夹持器元件安装支架,以围绕第一夹持器旋转轴线进行枢转移动,并且包括第一挂钩,该第一挂钩位于相对于第一夹持器旋转轴线径向间隔开的位置处并且被构造成安置在容器的凹槽中的一个中;以及第二夹持器元件,该第二夹持器元件安装到夹持器元件安装支架,以围绕可以平行于第一夹持器旋转轴线的第二夹持器旋转轴线进行枢转移动,并且包括第二挂钩,该第二挂钩位于相对于第二夹持器旋转轴线径向间隔开的位置处并且被构造成安置在容器的相对凹槽中。在一些示例中,第一挂钩和第二挂钩朝向彼此弯曲,并且第一夹持器元件和第二夹持器元件彼此耦接,以围绕相应的第一夹持器旋转轴线和第二夹持器旋转轴线朝向彼此或远离彼此进行经协调的枢转移动。在一些示例中,容器夹持器可以构造成通过使第一夹持器元件和第二夹持器元件朝向彼此枢转直到相应的第一挂钩和第二挂钩被安置在容器的凹槽中的一个内来抓握容器。
25、在一些示例中,第一夹持器元件和第二夹持器元件可以通过以下各项彼此耦接以进行经协调的枢转移动:第一夹持器元件耦接齿轮,该第一夹持器元件耦接齿轮附接到第一夹持器元件并且与第一夹持器旋转轴线同轴布置;以及第二夹持器元件耦接齿轮,该第二夹持器元件耦接齿轮附接到第二夹持器元件并且与第二夹持器旋转轴线同轴布置;并且第一夹持器元件耦接齿轮和第二夹持器元件耦接齿轮相互接合,使得第一夹持器元件或第二夹持器元件的旋转引起另一个夹持器元件在相反的旋转方向上的对应的经协调的旋转。
26、在一些示例中,容器夹持器可以附加地或替代性地包括:夹持器马达,该夹持器马达具有夹持器致动器齿轮;夹持器驱动齿轮,该夹持器驱动齿轮与第一夹持器旋转轴线同轴安装并且被构造成独立于第一夹持器元件旋转,其中夹持器致动器齿轮可以与夹持器驱动齿轮接合;以及驱动销,该驱动销在与第一夹持器旋转轴线间隔开的位置处从第一夹持器元件延伸,其中驱动销延伸到形成在夹持器驱动齿轮中的开口中。
27、在一些示例中,容器夹持器可以附加地或替代性地包括连接到第一夹持器元件和第二夹持器元件中的至少一个的弹簧,并且形成在夹持器驱动齿轮中的开口可以包括弓形狭槽。
28、在一些示例中,夹持器推进系统可以附加地或替代性地包括:线性轨道;线性轴承,该线性轴承耦接到线性轨道,其中容器夹持器可以被支撑在线性轴承上;夹持器推进马达;以及传动带,该传动带耦接到夹持器推进马达并且固定到线性轴承。
29、在一些示例中,分配器移动系统可以包括:分配器头部框架,该分配器头部框架被安装以便能够围绕分配器旋转轴线旋转,其中容器夹持器可以被支撑在分配器头部框架上;固定太阳齿轮,该固定太阳齿轮与分配器轴线同轴布置;分配器马达,该分配器马达固定到分配器头部框架并且包括可操作地接合固定太阳齿轮的驱动亲爱。
30、在一些示例中,分配器移动系统可以附加地或替代性地包括:分配器头部框架,该分配器头部框架被安装以便能够围绕分配器旋转轴线旋转;固定太阳齿轮,该固定太阳齿轮与分配器轴线同轴布置;以及分配器马达,该分配器马达固定到分配器头部框架并且包括可操作地接合固定太阳齿轮的驱动齿轮。在一些示例中,夹持器推进系统可以附加地或替代性地包括:线性轨道,该线性轨道被支撑在分配器头部框架上并且相对于分配器轴线径向定向;线性轴承,该线性轴承耦接到线性轨道,其中容器夹持器可以被支撑在线性轴承上;夹持器推进马达,该夹持器推进马达安装到分配器头部框架;以及传动带,该传动带可操作地耦接到夹持器推进马达并且附接到线性轴承。
31、在一些示例中,容器存储模块可以附加地或替代性地包括至少一个热控制部件,以维持外壳内的期望温度,并且至少一个热部件可以包括热电模块、散热器和风扇中的一者或多者。
32、本文所述的示例包括一种用于传送容器的方法,该容器包括形成在该容器的相对侧上的凹槽。所述方法可包括以下步骤:将可移动支撑平台从不可接近位置移动到可接近位置,以向用户提供对支撑在可移动支撑平台上并包括多个容器凹穴的容器装载运输件的接近;将容器竖直插入容器凹穴中的一个或多个容器凹穴中的每一个中;将可移动支撑平台从可接近位置移动到不可接近位置;在形成在移动支撑平台中的传送开口处用容器装载运输件将容器凹穴顺序地运输到容器传送位置;通过将容器的凹槽与容器夹持器接合来抓握位于容器传送位置的容器装载运输件的容器凹穴中的一个中所承载的容器;用夹持器推进系统移动容器夹持器以将容器从其中可以固持有容器的容器装载运输件的容器凹穴横向移除;用分配器移动系统将容器夹持器和由其固持的容器从容器传送位置移动到容器存储模块的外壳的进入/脱离开口;将从容器存储模块的可移动屏障延伸的推动器销与致动器臂接合,并且用分配器移动系统移动致动器臂,以将容器存储模块的可移动屏障从阻挡容器进入/脱离开口的第一位置移动到准许容器横向移动穿过容器进入/脱离开口的第二位置;用夹持器推进系统移动容器夹持器,以将由夹持器固持的容器插入穿过进入/脱离开口并进入设置在外壳内的容器存储运输件的多个容器固持站中的一个中,其中每个容器固持站可以包括弹簧片,这些弹簧片被构造成弹性地接合容器固持站中所固持的容器的凹槽,以将容器保持在容器固持站中,并且被构造成向外偏转以准许容器横向插入容器固持站中或从其横向移除;以及通过将夹持器与容器的凹槽脱离接合来在容器固持站中释放容器。
33、在一些示例中,移动可移动支撑平台可以包括移动抽屉,该抽屉可以能够在其中可移动支撑平台可以缩回到仪器中的不可接近位置与其中可移动支撑平台可以从仪器延伸的可接近位置之间移动。
34、在一些示例中,容器装载运输件可以包括装载转盘,该装载转盘被支撑在可移动支撑平台上以围绕装载转盘轴线旋转,容器凹穴可以围绕装载转盘轴线周向布置并且可以在其上部端部处开放,并且顺序地运输容器凹穴可以包括围绕转盘轴线旋转转盘。
35、在一些示例中,容器凹穴可以附加地或替代性地在装载转盘的外周边处开放,并且抓握容器凹穴中的一个中所承载的容器可以包括将容器夹持器插入穿过开放外周边以接合容器的凹槽,并且从容器凹穴横向移除容器可以包括用容器夹持器移动容器穿过开放外周边。
36、在一些示例中,该方法可以附加地或替代性地包括用扫描器扫描关于容器装载运输件上所承载的每个容器的机器可读信息。
37、在一些示例中,扫描器可以包括条形码扫描器。
38、在一些示例中,该方法可以附加地或替代性地包括用原位传感器监测容器装载运输件的凹穴中所固持的每个容器的位置,该原位传感器用于检测容器装载运输件的原始位置。
39、在一些示例中,该方法可以附加地或替代性地包括以下自动步骤:a)用容器存储运输件将容器移动到外壳内的液位感测方位;b)相对于容器移动可移动接地元件,直到接地元件可以非常接近于或接触容器的一部分;c)将导电探针或可移除地附接到该探针的导电尖端下降穿过外壳中的容器接近开口并进入容器中;d)当探针或导电尖端接触容器内的流体的表面时检测信号或信号变化,其中信号或信号变化可以基于探针或导电尖端与可以非常接近于或接触容器的一部分的可移动接地元件之间的电容;以及e)记录可以检测到信号或信号变化的竖直探针位置。
40、在一些示例中,该方法可以附加地或替代性地包括以下自动步骤:f)在液位感测方位处将容器与容器定位器接触,以迫使容器进入可重复的竖直液位感测位置。
41、在一些示例中,该方法可以附加地或替代性地包括以下自动步骤:g)将与容器存储运输件邻近定位的容器定位坡道与定位在液位感测方位处的容器的下部部分接触;以及h)接触定位在液位感测方位处的容器的顶部部分并向下推动容器,使得容器的底部部分维持与容器定位坡道接触。
42、在一些示例,步骤b)和h)同时执行。
43、在一些示例中,该方法可以附加地或替代性地包括以下步骤:i)在步骤b)期间,将附接到外壳的挡板从覆盖容器接近开口的第一位置自动移动到暴露容器接近开口的第二位置。
44、本文所述的示例包括一种用于抓握和传送容器的机构,其中容器可以包括形成在该容器的相对侧上的竖直定向的凹槽。该机构可以包括:底架,该底架被构造成围绕竖直定向的旋转轴线旋转;以及夹持器托架,该夹持器托架被支撑在底架上以与该底架一起旋转,并且被构造成相对于底架旋转轴线在径向方向上移动。夹持器托架可以包括容器夹持器,该容器夹持器包括:第一夹持器元件,该第一夹持器元件安装到夹持器托架,以围绕可以平行于底架旋转轴线的第一夹持器旋转轴线进行枢转移动,并且包括第一挂钩,该第一挂钩位于相对于第一夹持器旋转轴线径向间隔开的位置处;以及第二夹持器元件,该第二夹持器元件安装到夹持器托架,以围绕可以平行于第一夹持器旋转轴线的第二夹持器旋转轴线进行枢转移动,并且包括第二挂钩,该第二挂钩位于相对于第二夹持器旋转轴线径向间隔开的位置处。第一挂钩和第二挂钩可以朝向彼此弯曲,并且第一夹持器元件和第二夹持器元件彼此耦接,以围绕相应的第一夹持器旋转轴线和第二夹持器旋转轴线朝向彼此或远离彼此进行经协调的枢转移动。容器夹持器可以构造成通过使第一夹持器元件和第二夹持器元件朝向彼此枢转直到相应的第一挂钩和第二挂钩各自接合容器的竖直定向的凹槽中的一个来抓握容器。
45、在一些示例中,第一夹持器元件和第二夹持器元件可以通过以下各项彼此耦接以进行经协调的枢转移动:第一夹持器元件耦接齿轮,该第一夹持器元件耦接齿轮附接到第一夹持器元件并且与第一夹持器旋转轴线同轴布置;以及第二夹持器元件耦接齿轮,该第二夹持器元件耦接齿轮附接到第二夹持器元件并且与第二夹持器旋转轴线同轴布置。第一夹持器元件耦接齿轮和第二夹持器元件耦接齿轮相互接合,使得第一夹持器元件或第二夹持器元件的旋转引起另一个夹持器元件在相反的旋转方向上的对应的经协调的旋转。
46、在一些示例中,该机构可以附加地或替代性地包括:夹持器马达,该夹持器马达具有夹持器致动器齿轮;夹持器驱动齿轮,该夹持器驱动齿轮与第一夹持器旋转轴线同轴安装并且被构造成独立于第一夹持器元件旋转,其中夹持器致动器齿轮可以与夹持器驱动齿轮接合;以及驱动销,该驱动销在与第一夹持器旋转轴线间隔开的位置处从第一夹持器元件延伸,其中驱动销延伸到形成在夹持器驱动齿轮中的开口中。
47、在一些示例中,该机构可以附加地或替代性地包括连接到第一夹持器元件和第二夹持器元件中的至少一个的弹簧,并且形成在夹持器驱动齿轮中的开口可以包括弓形狭槽。
48、在一些示例中,该机构可以附加地或替代性地包括:线性轨道;线性轴承,该线性轴承耦接到线性轨道,其中夹持器托架可以被支撑在线性轴承上;夹持器推进马达;以及传动带,该传动带耦接到夹持器推进马达并且附接到线性轴承,使得传动带通过夹持器推进马达的移动在径向方向上移动夹持器托架。
49、在一些示例中,该机构可以附加地或替代性地包括:固定太阳齿轮,该固定太阳齿轮与底架旋转轴线同轴布置;以及马达,该马达固定到底架并且包括驱动亲爱,该驱动亲爱可操作地接合固定太阳齿轮,使得由马达引起的驱动齿轮的旋转致使底架围绕底架旋转轴线旋转。
50、本文所述的示例包括一种用于对支撑在可移动载体上的流体容器内的流体执行电容式液位感测的机构。该机构可以包括:导电探针,该导电探针被构造成当探针或可移除地附接到该探针的导电尖端接触容器内的流体的表面时通过检测信号或信号变化来进行电容式液位感测,其中信号或信号变化是基于探针或导电尖端与邻近或接触容器的接地的导电结构之间的电容;探针位置传感器,该探针位置传感器用于监测探针的竖直位置并记录可以检测到信号或可检测信号变化的竖直探针位置;以及可移动接地元件,该可移动接地元件被构造成相对于由可移动载体定位在相对于探针的液位感测方位处的容器进行选择性移动,直到接地元件可以非常接近于或接触容器的一部分。
51、在一些示例中,可移动接地元件的一部分可以被成形为与容器的部分吻合。
52、在一些示例中,该机构可以附加地或替代性地包括马达、可操作地耦接到马达的螺纹杆以及可操作地耦接到螺纹杆的支架,其中可移动接地元件可以附接到支架。
53、在一些示例中,可移动载体可以包含在具有载体上方的顶部壁的外壳内,并且容器接近开口穿过顶部壁形成在液位感测方位上方并且被构造成准许探针或可移除地附接到探针的导电尖端进入位于液位感测方位处的容器。该机构可以附加地或替代性地包括挡板,该挡板附接到顶部壁,并且可在覆盖容器接近开口的第一位置与暴露容器接近开口的第二位置之间移动。挡板可以可操作地耦接到马达,以当马达将可移动接地元件移动到非常接近于或接触容器的部分时实现挡板从第一位置到第二位置的动力移动。
54、在一些示例中,挡板可以包括扇形齿轮,该扇形齿轮可以可枢转地安装到顶部壁并且可以包括沿着其弓形边缘的齿轮齿,这些齿轮齿接合由马达驱动的齿轮。
55、在一些示例中,该机构可以附加地或替代性地包括容器定位器,该容器定位器被构造成接触定位在液位感测方位处的容器,并且迫使容器进入可重复的竖直液位感测位置。
56、在一些示例中,容器定位器可以包括:容器定位坡道,该容器定位坡道被构造成与定位在液位感测方位处的容器的底部部分接触;以及容器压紧臂,该容器压紧臂被构造成接触定位在液位感测方位处的容器的顶部部分,并且向下推动容器,使得容器的底部部分维持与容器定位坡道接触。
57、在一些示例中,可移动载体可以包括转盘,该转盘能够围绕竖直定向的转盘旋转轴线旋转并且包括设置在围绕转盘旋转轴线成角度间隔开的位置处的多个容器固持站。每个容器固持站可以包括弹簧片,这些弹簧片相对于转盘旋转轴线横向延伸,并且被构造成弹性地接合容器固持站中所固持的容器的凹槽以将容器保持在容器固持站中,使得容器可以能够在容器固持站的弹簧片之间在竖直方向上滑动。容器定位坡道可以被设置在转盘的一部分下方,并且可以被构造成当转盘将容器移动到液位感测方位中时与容器固持站中所固持的容器的底部部分接触,容器与容器定位坡道之间的接触可以将容器固持站内的容器滑动到容器的底部接触容器定位坡道的位置,并且容器压紧臂可以被构造成接触容器的顶部部分以使容器在容器固持站内向下滑动,使得容器的底部部分维持与容器定位坡道接触。
58、在一些示例中,容器压紧臂可以耦接到可移动接地元件,使得当可移动接地元件移动到非常接近于或接触容器的部分时,容器压紧臂可以移动到与容器的顶部部分接触,以向下推动容器,使得容器的底部部分维持与容器定位坡道接触。
59、在一些示例中,容器定位坡道可以包括倾斜的第一端部、水平中心部分和倾斜的第二端部,并且其中当容器可以被定位在液位感测方位处时,容器可以被定位在水平中心部分上。
60、在一些示例中,容器定位坡道可以被成形为吻合由可移动载体移动穿过液位感测方位的容器横穿的路径的一部分。
61、在一些示例中,该机构可以附加地或替代性地包括第一辊,该第一辊在倾斜的第一端部的开始处,以将容器的底部部分引导到倾斜的第一端部上。
62、在一些示例中,该机构可以附加地或替代性地包括第二辊,该第二辊在倾斜的第二端部的开始处,以将容器的底部部分引导到倾斜的第二端部上。
63、在一些示例中,可移动载体可以包含在具有载体上方的顶部壁的外壳内,并且容器接近开口穿过顶部壁形成在液位感测方位上方,并且被构造成准许探针或可移除地附接到探针的导电尖端穿过容器接近开口进入位于液位感测方位处的容器。该机构可以附加地或替代性地包括:马达;螺纹杆,该螺纹杆可操作地耦接到马达;从动块,该从动块以螺纹方式耦接到螺纹杆;支架,该支架从从动块延伸;挡板,该挡板附接到顶部壁,并且可在覆盖容器接近开口的第一位置与暴露容器接近开口的第二位置之间移动;容器定位坡道,该容器定位坡道被构造成与定位在液位感测方位处的容器的底部部分接触;以及容器压紧臂,该容器压紧臂被构造成在第一位置与第二位置之间移动,该第一位置不接触定位在液位感测方位处的容器,该第二位置接触定位在液位感测方位处的容器的顶部部分,以向下推动容器,使得容器的底部部分维持与容器定位坡道接触。可移动接地元件可以附接到支架,使得由马达引起的螺纹杆在第一方向上的旋转致使接地元件移动到与容器的部分非常接近或接触,并且由马达引起的螺纹杆在第二方向上的旋转致使接地元件移动从与容器的部分非常接近或接触远离。挡板可以可操作地耦接到马达,以当马达将可移动接地元件移动到与容器的部分非常接近或接触时实现挡板从第一位置到第二位置的动力移动,并且当马达将可移动接地元件移动从与容器的部分非常接近或接触远离时实现挡板从第二位置到第一位置的动力移动。从动块可以接触容器压紧臂,以当马达将可移动接地元件移动到与容器的部分非常接近或接触并将挡板从其第一位置移动到其第二位置时将容器压紧臂从其第一位置移动到其第二位置。
64、在一些示例中,挡板可以包括扇形齿轮,该扇形齿轮可以可枢转地安装到顶部壁并且可以包括沿着其弓形边缘的齿轮齿,这些齿轮齿接合与螺纹杆同轴的由马达驱动的齿轮。
65、在一些示例中,容器压紧臂可以被构造成在其第一位置与其第二位置之间进行枢转移动,并且其中该机构可以附加地或替代性地包括弹簧,该弹簧耦接到容器压紧臂以将容器压紧臂偏置在其第一位置中。
66、本文所述的示例包括一种用于对支撑在可移动载体上的容器内的流体执行电容式液位感测的方法。所述方法可包括:以下自动步骤:a)用可移动载体将容器移动到液位感测方位;b)相对于容器移动可移动接地元件,直到接地元件可以非常接近于或接触容器的一部分;c)将导电探针或可移除地附接到该探针的导电尖端下降到容器中;d)当探针或导电尖端接触容器内的流体的表面时检测信号或信号变化,其中信号或信号变化可以基于探针或导电尖端与可以非常接近于或接触容器的一部分的可移动接地元件之间的电容;以及e)记录可以检测到信号或信号变化的竖直探针位置。
67、在一些示例中,该方法可以附加地或替代性地包括以下自动步骤:f)在液位感测方位处将容器与容器定位器接触,以迫使容器进入可重复的竖直液位感测位置中。
68、在一些示例中,步骤f)可以包括以下自动步骤:g)将与可移动载体邻近定位的容器定位坡道与定位在液位感测方位处的容器的底部部分接触;以及h)接触定位在液位感测方位处的容器的顶部部分并向下推动容器,使得容器的底部部分维持与容器定位坡道接触。
69、在一些示例,步骤b)和h)同时执行。
70、在一些示例中,容器定位坡道可以包括倾斜的第一端部、水平中心部分和倾斜的第二端部,并且当容器被定位在液位感测方位处时,容器被定位在水平中心部分上。
71、在一些示例中,容器定位坡道可以附加地或替代性地包括第一辊,该第一辊在倾斜的第一端部的开始处,以将容器的底部部分引导到倾斜的第一端部上。
72、在一些示例中,容器定位坡道可以附加地或替代性地包括第二辊,该第二辊在倾斜的第二端部的开始处,以将容器的底部部分引导到倾斜的第二端部上。
73、在一些示例中,可移动载体可以包括转盘,该转盘可围绕竖直定向的转盘旋转轴线旋转并且包括设置在围绕转盘旋转轴线成角度间隔开的位置处的多个容器固持站。每个容器固持站可以包括弹簧片,这些弹簧片相对于转盘旋转轴线横向延伸,并且被构造成弹性地接合容器固持站中所固持的容器的凹槽以将容器保持在容器固持站中,使得容器可以能够在容器固持站的弹簧片之间在竖直方向上滑动。容器的底部部分与容器定位坡道接触可以使容器在容器固持站内滑动到可重复的竖直液位感测位置,并且容器的顶部部分与容器压紧臂接触使容器在容器固持站内向下滑动,使得容器的底部部分维持与容器定位坡道接触。
74、在一些示例中,载体可以包含在具有载体上方的顶部壁的外壳内,并且容器接近开口穿过顶部壁形成在液位感测方位上方并且被构造成准许探针或可移除地附接到探针的导电尖端进入位于液位感测方位处的容器。并且该方法可以附加地或替代性地包括执行以下步骤:i)在步骤b)期间,将附接到顶部壁的挡板从覆盖容器接近开口的第一位置自动移动到暴露容器接近开口的第二位置。
75、在一些示例中,可移动接地元件的一部分可以被成形为与容器的部分吻合。
76、在一些示例中,容器定位坡道可以被成形为吻合由可移动载体移动穿过液位感测方位的容器横穿的路径的一部分。
77、本文所述的示例包括一种用于提供对基本上封闭的外壳内的多个容器中的一个的选择性接近的机构。该机构可以包括:可移动载体,该可移动载体在外壳内并且被构造成固持和承载多个容器;容器接近开口,该容器接近开口形成在外壳的顶部壁中在由可移动载体上所承载的多个容器所横穿的路径上的位置处,使得载体的移动顺序地将多个容器中的每一个放置在容器接近开口下方;以及挡板,该挡板可枢转地附接到外壳的顶部壁并且可在第一位置与第二位置之间枢转,该第一位置覆盖容器接近开口,以由此防止穿过容器接近开口接近位于容器接近开口下方的容器,该第二位置暴露容器接近开口,以由此允许穿过容器接近开口接近位于容器接近开口下方的容器。
78、在一些示例中,该机构可以附加地或替代性地包括马达,该马达可操作地耦接到挡板以实现挡板从第一位置到第二位置的动力移动。
79、在一些示例中,挡板可以包括扇形齿轮,该扇形齿轮被安装以在第一位置与第二位置之间进行枢转移动,并且包括沿着其弓形边缘的齿轮齿,这些齿轮齿接合由马达驱动的齿轮。
80、在一些示例中,该机构可以附加地或替代性地包括容器压紧臂,该容器压紧臂被构造成在第一位置与第二位置之间移动,该第一位置不接触定位在容器接近开口下方的容器,该第二位置接触定位在容器接近开口下方的容器的顶部部分,以将容器固持在固定竖直位置中。马达可以耦接到容器压紧臂,以当马达将挡板从其第一位置移动到其第二位置时将容器压紧臂从其第一位置移动到其第二位置。
81、在一些示例中,该机构可以附加地或替代性地包括螺纹杆,该螺纹杆可操作地耦接到马达,其中由马达驱动的齿轮可以与螺纹杆和以螺纹方式耦接到螺纹杆的从动块同轴布置。容器压紧臂可以被构造成在其第一位置与其第二位置之间进行枢转移动,并且容器压紧臂接触从动块,使得当由马达驱动的齿轮旋转扇形齿轮以将挡板从其第一位置移动到其第二位置时,螺纹杆移动从动块以将容器压紧臂从其第一位置移动到其第二位置。
82、在一些示例中,该机构可以附加地或替代性地包括弹簧,该弹簧耦接到容器压紧臂以将容器压紧臂偏置在其第一位置中。
83、本文所述的示例包括一种用于提供对基本上封闭的外壳内的多个容器中的一个的选择性接近的方法。所述方法可包括:以下自动步骤:a)在可移动载体上承载外壳内的多个容器,b)将可移动载体上所承载的多个容器中的每一个顺序地放置在形成在外壳的顶部壁中的容器接近开口下方,以及c)将可枢转地附接到外壳的顶部壁的挡板从覆盖容器接近开口的第一位置自动枢转到暴露容器接近开口的第二位置。
84、在一些示例中,该方法可以附加地或替代性地包括以下步骤:d)在步骤c)期间,自动接触定位在容器接近开口下方的容器的顶部部分,以将容器固持在固定竖直位置处。
85、在一些示例中,步骤d)可以包括使定位在容器接近开口下方的容器的顶部部分与容器压紧臂接触。
86、本文所述的示例包括一种用于处理用过的容器的系统,该系统包括设置在废物开口上方的保持器架。保持器架可以包括相对的竖直定向的第一侧和第二侧、从保持器架的第一侧朝向第二侧横向延伸的上部保持器杆和下部保持器杆、以及容器夹持器。上部保持器杆和下部保持器杆彼此竖直间隔开并且延伸跨过保持器架的宽度的一部分,以便在第二侧与保持器杆的末端端部之间留有间隙。上部保持器杆和下部保持器杆与第二侧之间的间隙可以被构造成准许容器插入穿过间隙。容器夹持器被构造成固持容器,穿过间隙将容器插入到第一侧与第二侧之间的位置,并且移动到由此夹持器可以定位在竖直间隔开的上部保持器杆与下部保持器杆之间且容器可以位于上部保持器杆和下部保持器杆后方的位置。
87、在一些示例中,容器包括形成在该容器的相对侧上的凹槽,并且容器夹持器可以包括:夹持器元件安装支架;第一夹持器元件,该第一夹持器元件安装到夹持器元件安装支架,以围绕第一夹持器旋转轴线进行枢转移动,并且包括第一挂钩,该第一挂钩位于相对于第一夹持器旋转轴线径向间隔开的位置处并且被构造成安置在容器的凹槽中的一个中;以及第二夹持器元件,该第二夹持器元件安装到夹持器元件安装支架,以围绕可以平行于第一夹持器旋转轴线的第二夹持器旋转轴线进行枢转移动,并且包括第二挂钩,该第二挂钩位于相对于第二夹持器旋转轴线径向间隔开的位置处并且被构造成安置在容器的相对凹槽中。第一挂钩和第二挂钩可以朝向彼此弯曲。第一夹持器元件和第二夹持器元件可以彼此耦接,以围绕相应的第一夹持器旋转轴线和第二夹持器旋转轴线朝向彼此或远离彼此进行经协调的枢转移动。容器夹持器可以构造成通过使第一夹持器元件和第二夹持器元件朝向彼此枢转直到相应的第一挂钩和第二挂钩被安置在容器的凹槽中的一个内来抓握容器。第一和第二夹持器元件当抓握容器时装配在竖直间隔开的上部保持器杆与下部保持器杆之间。
88、在一些示例中,第一夹持器元件和第二夹持器元件通过以下各项彼此耦接以进行协调枢转移动:第一夹持器元件耦接齿轮,该第一夹持器元件耦接齿轮附接到第一夹持器元件并且与第一夹持器旋转轴线同轴布置;以及第二夹持器元件耦接齿轮,该第二夹持器元件耦接齿轮附接到第二夹持器元件并且与第二夹持器旋转轴线同轴布置。第一夹持器元件耦接齿轮和第二夹持器元件耦接齿轮可以相互接合,使得第一夹持器元件或第二夹持器元件的旋转引起另一个夹持器元件在相反的旋转方向上的对应的经协调的旋转。
89、在一些示例中,容器夹持器可以附加地或替代性地包括:夹持器马达,该夹持器马达具有夹持器致动器齿轮;夹持器驱动齿轮,该夹持器驱动齿轮与第一夹持器旋转轴线同轴安装并且被构造成独立于第一夹持器元件旋转,其中夹持器致动器齿轮可以与夹持器驱动齿轮接合;以及驱动销,该驱动销在与第一夹持器旋转轴线间隔开的位置处从第一夹持器元件延伸,其中驱动销延伸到形成在夹持器驱动齿轮中的开口中。
90、在一些示例中,容器夹持器可以附加地或替代性地包括连接到第一夹持器元件和第二夹持器元件中的至少一个的弹簧,并且其中形成在夹持器驱动齿轮中的开口可以包括弓形狭槽。
91、在一些示例中,该系统可以附加地或替代性地包括夹持器推进系统,该夹持器推进系统包括:线性轨道;线性轴承,该线性轴承耦接到线性轨道,其中容器夹持器可以被支撑在线性轴承上;夹持器推进马达;以及传动带,该传动带耦接到夹持器推进马达并且固定到线性轴承。
92、在一些示例中,夹持器可以附加地或替代性地包括底架,该底架被构造成围绕竖直定向的底架旋转轴线旋转。夹持器安装支架可以被支撑在底架上以与该底架一起旋转,第一夹持器旋转轴线可以平行于底架旋转轴线,并且第二夹持器旋转轴线可以平行于底架旋转轴线。
93、本文所述的示例包括一种用于处理用过的容器的方法。所述方法可包括:用固持用过的容器的容器夹持器将用过的容器水平移动到设置在废物开口上方的保持器架中。保持器架可以包括相对的竖直定向的第一侧和第二侧,以及从保持器架的第一侧朝向第二侧横向延伸的上部保持器杆和下部保持器杆。上部保持器杆和下部保持器杆可以彼此竖直间隔开并且延伸跨过保持器架的宽度的一部分,以便在上保持器杆和下部保持器杆的末端端部与第二侧之间留有间隙,容器夹持器穿过该间隙将用过的容器水平移动到保持器架中。容器夹持器和由其固持的用过的容器在保持器架内水平移动,直到容器夹持器延伸穿过竖直间隔开的上部保持器杆与下部保持器杆之间的间隙,并且用过的容器可以被设置在上部保持器杆和下部保持器杆后方,并且用过的容器从容器夹持器释放,使得用过的容器穿过其上方可以设置有保持器架的废物开口掉落。
94、在一些示例中,该方法可以附加地或替代性地包括从竖直间隔开的上部保持器杆与下部保持器杆之间的间隙水平移动容器夹持器的步骤。
95、在一些示例中,容器包括形成在该容器的相对侧上的凹槽,并且容器夹持器可以包括:夹持器元件安装支架;第一夹持器元件,该第一夹持器元件安装到夹持器元件安装支架,以围绕第一夹持器旋转轴线进行枢转移动,并且包括第一挂钩,该第一挂钩位于相对于第一夹持器旋转轴线径向间隔开的位置处并且被构造成安置在容器的凹槽中的一个中;以及第二夹持器元件,该第二夹持器元件安装到夹持器元件安装支架,以围绕平行于第一夹持器旋转轴线的第二夹持器旋转轴线进行枢转移动,并且包括第二挂钩,该第二挂钩位于相对于第二夹持器旋转轴线径向间隔开的位置处并且被构造成安置在容器的相对凹槽中。第一挂钩和第二挂钩可以朝向彼此弯曲,并且第一夹持器元件和第二夹持器元件彼此耦接,以围绕相应的第一夹持器旋转轴线和第二夹持器旋转轴线朝向彼此或远离彼此进行经协调的枢转移动。容器夹持器可以构造成通过使第一夹持器元件和第二夹持器元件朝向彼此枢转直到相应的第一挂钩和第二挂钩被安置在容器的凹槽中的一个内来抓握容器。第一和第二夹持器元件当抓握容器时装配在竖直间隔开的上部保持器杆与下部保持器杆之间。
96、在一些示例中,第一夹持器元件和第二夹持器元件可以通过以下各项彼此耦接以进行协调枢转移动:第一夹持器元件耦接齿轮,该第一夹持器元件耦接齿轮附接到第一夹持器元件并且与第一夹持器旋转轴线同轴布置;以及第二夹持器元件耦接齿轮,该第二夹持器元件耦接齿轮附接到第二夹持器元件并且与第二夹持器旋转轴线同轴布置。第一夹持器元件耦接齿轮和第二夹持器元件耦接齿轮可以相互接合,使得第一夹持器元件或第二夹持器元件的旋转引起另一个夹持器元件在相反的旋转方向上的对应的经协调的旋转。
97、在一些示例中,容器夹持器可以由以下各项致动以固持用过的容器或释放用过的容器:夹持器马达,该夹持器马达具有夹持器致动器齿轮;夹持器驱动齿轮,该夹持器驱动齿轮与第一夹持器旋转轴线同轴安装并且被构造成独立于第一夹持器元件旋转,其中夹持器致动器齿轮可以与夹持器驱动齿轮接合;以及驱动销,该驱动销在与第一夹持器旋转轴线间隔开的位置处从第一夹持器元件延伸,其中驱动销延伸到形成在夹持器驱动齿轮中的开口中。
98、在一些示例中,容器夹持器可以附加地或替代性地包括连接到第一夹持器元件和第二夹持器元件中的至少一个的弹簧,并且形成在夹持器驱动齿轮中的开口可以包括弓形狭槽。
99、在一些示例中,用过的容器可以用夹持器推进系统水平移动到保持器架中,该夹持器推进系统可以包括:线性轨道;线性轴承,该线性轴承耦接到线性轨道,其中容器夹持器可以被支撑在线性轴承上;夹持器推进马达;以及传动带,该传动带耦接到夹持器推进马达并且固定到线性轴承。
100、在一些示例中,夹持器和由其固持的用过的容器可以通过底架在保持器架内水平移动,该底架被构造成围绕竖直定向的底架旋转轴线旋转。夹持器安装支架可以被支撑在底架上以与该底架一起旋转,第一夹持器旋转轴线可以平行于底架旋转轴线,并且第二夹持器旋转轴线可以平行于底架旋转轴线。
101、本文所述的示例包括一种用于将支撑在可移动载体上的流体容器定位在预定方位处的机构。该机构可以包括:容器定位坡道,该容器定位坡道邻近可移动载体的一部分定位,并且被构造成当可移动载体将容器移动到预定方位时与支撑在可移动载体上的容器的底部部分接触;以及容器压紧臂,该容器压紧臂被构造成相对于定位在预定方位处的容器进行选择性移动。容器压紧臂可以被构造成接触定位在预定方位处的容器的顶部部分并向下推动容器,使得容器的底部部分维持与容器定位坡道接触。
102、在一些示例中,容器定位坡道可以包括倾斜的第一端部、水平中心部分和倾斜的第二端部,并且当容器被定位在液位感测方位处时,容器被定位在水平中心部分上。
103、在一些示例中,该机构可以附加地或替代性地包括辊,该辊在倾斜的第一端部的开始处,以将容器的底部部分引导到倾斜的第一端部上。
104、在一些示例中,该机构可以附加地或替代性地包括马达、可操作地耦接到马达的螺纹杆以及以螺纹方式耦接到螺纹杆的从动块。从动块可以接触容器压紧臂,以当马达移动从动块时将容器压紧臂从其第一位置移动到其第二位置。
105、在一些示例中,可移动载体可以包含在具有载体上方的顶部壁的外壳内,并且容器接近开口穿过顶部壁形成在预定方位上方并且被构造成准许流体传送探针或可移除地附接到流体传送探针的尖端进入位于容器接近开口下方的容器。该机构可以附加地或替代性地包括挡板,该挡板附接到顶部壁,并且可在覆盖容器接近开口的第一位置与暴露容器接近开口的第二位置之间移动。挡板可以可操作地耦接到马达,以当马达移动从动块以将容器压紧臂从其第一位置移动到其第二位置时实现挡板从第一位置到第二位置的动力移动。
106、在一些示例中,可移动载体可以包括转盘,该转盘能够围绕竖直定向的转盘旋转轴线旋转,并且包括设置在围绕转盘旋转轴线成角度间隔开的位置处的多个容器固持站。每个容器固持站可以包括弹簧片,这些弹簧片相对于转盘旋转轴线横向延伸,并且被构造成弹性地接合容器固持站中所固持的容器的凹槽以将容器保持在容器固持站中,使得容器可以能够在容器固持站的弹簧片之间在竖直方向上滑动。容器定位坡道可以被设置在转盘的一部分下方,并且可以被构造成当转盘将容器移动到预定方位中时与容器固持站中所固持的容器的底部部分接触。
107、容器与容器定位坡道之间的接触可以使容器在容器固持站内滑动到容器的底部接触容器定位坡道的位置。容器压紧臂可以被构造成接触容器的顶部部分以使容器在容器固持站内向下滑动,使得容器的底部部分维持与容器定位坡道接触。
108、本文所述的示例包括一种用于固持和移动多个容器的机构,每个容器包括形成在该容器的相对侧上的竖直定向的凹槽。该机构可以包括被构造成能够围绕竖直定向的旋转轴线旋转的转盘,并且转盘可以包括围绕转盘的外周边周向布置的多个容器固持凹穴。每个容器固持凹穴可以在转盘的外周边处开放,以准许容器在相对于旋转轴线的径向方向上从凹穴中取出,并且每个容器固持凹穴可以包括保持夹,这些保持夹被构造成接合形成在容器上的凹槽以将容器可移除地保持在容器凹穴内。
109、在一些示例中,每个容器固持凹穴可以包括形成在容器凹穴的开放周边端部的相对侧上的凸纹,以为夹持机构打开以将容器固持凹穴内所固持的容器的凹槽接合或脱离接合提供间隙。
110、在一些示例中,该机构可以附加地或替代性地包括扫描器,该扫描器被配置成扫描关于转盘上的容器固持凹穴中所承载的每个容器的机器可读信息。
111、在一些示例中,扫描器可以包括条形码扫描器。
112、在一些示例中,该机构可以附加地或替代性地包括设置在每个容器凹穴的壁上的机器可读标签,并且扫描器可以被配置成当容器凹穴为空时检测机器可读标签。
113、在一些示例中,该机构可以附加地或替代性地包括马达,该马达耦接到转盘以实现转盘围绕转盘轴线的动力旋转。
114、在一些示例中,每个容器固持凹穴可以包括容器定位夹板,该容器定位夹板被构造成接合形成在定位在容器固持凹穴内的容器中的凹口。
115、在一些示例中,该机构可以附加地或替代性地包括用于检测转盘的原始旋转位置的原位传感器。
116、本文所述的示例包括一种用于固持和运输多个容器的方法,每个容器包括形成在该容器的相对侧上的竖直定向的凹槽。所述方法可包括:将容器运输到围绕转盘的周边形成的容器固持凹穴中,该转盘能够围绕竖直定向的旋转轴线旋转;将每个容器可移除地保持在相关联的容器固持凹穴中,其中保持夹与形成在容器上的凹槽接合;以及穿过容器固持凹穴的开放外周边侧将每个容器从其相关联的容器固持凹穴中横向移除。
117、在一些示例中,每个容器固持凹穴可以包括形成在容器凹穴的开放外周边侧的相对侧上的凸纹,并且将每个容器从其相关联的容器固持凹穴中横向移除可以包括使容器的凹槽与穿过凸纹接近容器的凹槽的容器夹持器接合。
118、在一些示例中,该方法可以附加地或替代性地包括用扫描器扫描关于转盘上的容器固持凹穴中所承载的每个容器的机器可读信息。
119、在一些示例中,扫描器可以包括条形码扫描器。
120、在一些示例中,该方法可以附加地或替代性地包括当容器凹穴为空时用扫描器扫描设置在容器凹穴的壁上的机器可读标签。
121、在一些示例中,马达可以附加地或替代性地耦接到转盘以实现转盘围绕转盘轴线的动力旋转。
122、在一些示例中,该方法可以附加地或替代性地包括使形成在每个容器中的凹口与延伸到容器固持凹穴中的容器定位夹板接合。
123、本文所述的示例包括一种用于多个容器的载体,每个容器包括形成在该容器的相对侧上的凹槽。该载体可以包括转盘,该转盘能够围绕竖直定向的转盘旋转轴线旋转并且包括围绕转盘旋转轴线设置在成角度间隔开的位置处的多个容器固持站。每个容器固持站可以包括弹簧片,这些弹簧片相对于转盘旋转轴线横向延伸,并且被构造成弹性地接合容器固持站中所固持的容器的凹槽以将容器保持在容器固持站中,使得容器可以能够在容器固持站的弹簧片之间在竖直方向上滑动。该载体可以包括容器定位坡道,该容器定位坡道被设置在转盘的一部分下方,并且被构造成当转盘将容器固持站移动到容器定位坡道上方时与容器固持站中所固持的容器的底部部分接触。容器与容器定位坡道之间的接触可以使容器在容器固持站内滑动到容器的底部接触容器定位坡道的位置。该载体可以包括容器压紧臂,该容器压紧臂被构造成相对于接触容器定位坡道的容器进行选择性移动,并且容器压紧臂可以被构造成接触容器的顶部部分以使容器在容器固持站内向下滑动,使得容器的底部部分维持与容器定位坡道接触。
124、在一些示例中,转盘可以包括包含多对相对的、面对的弹簧片的上部夹环和包含多对相对的、面对的弹簧片的下部夹环,并且上部夹环的每对弹簧片可以与下部夹环的对应的一对弹簧片对准,以限定每个容器固持站。
125、在一些示例中,上部夹环可以与下部夹环间隔开,使得上部夹环的每对弹簧片可以与下部夹环的对应的一对弹簧片间隔开。
126、在一些示例中,每个弹簧片可以包括朝向每对弹簧片中的相对的、面对的弹簧片向内弯曲的转向节,并且每个转向节可以安置到设置在固持站中的容器的凹槽中的一个中。
127、在一些示例中,该载体可以附加地或替代性地包括马达、可操作地耦接到马达的螺纹杆以及以螺纹方式耦接到螺纹杆的从动块。从动块可以接触容器压紧臂,以当马达移动从动块时将容器压紧臂从不接触容器的顶部的第一位置移动到接触容器的顶部的第二位置。
128、在一些示例中,容器压紧臂可以可枢转地安装在安装轭内,压紧臂的第一端部可以与从动块接触,并且当第一端部与从动块接触以枢转压紧臂时,压紧臂的第二端部可以接触容器。
129、在参考附图考虑以下描述和所附权利要求书之后,本公开主题的其它特征和特性,以及相关结构元件和部件组合的操作方法、功能,以及制造经济性将变得更加显而易见,所有这些都形成本说明书的部分,其中相同的附图标号在各图中表示对应部件。
130、附图简要说明
131、并入本文中并且形成说明书的一部分的附图示出了本公开主题的各种实施例。在图式中,相同的附图标号指示相同或功能上类似的元件。
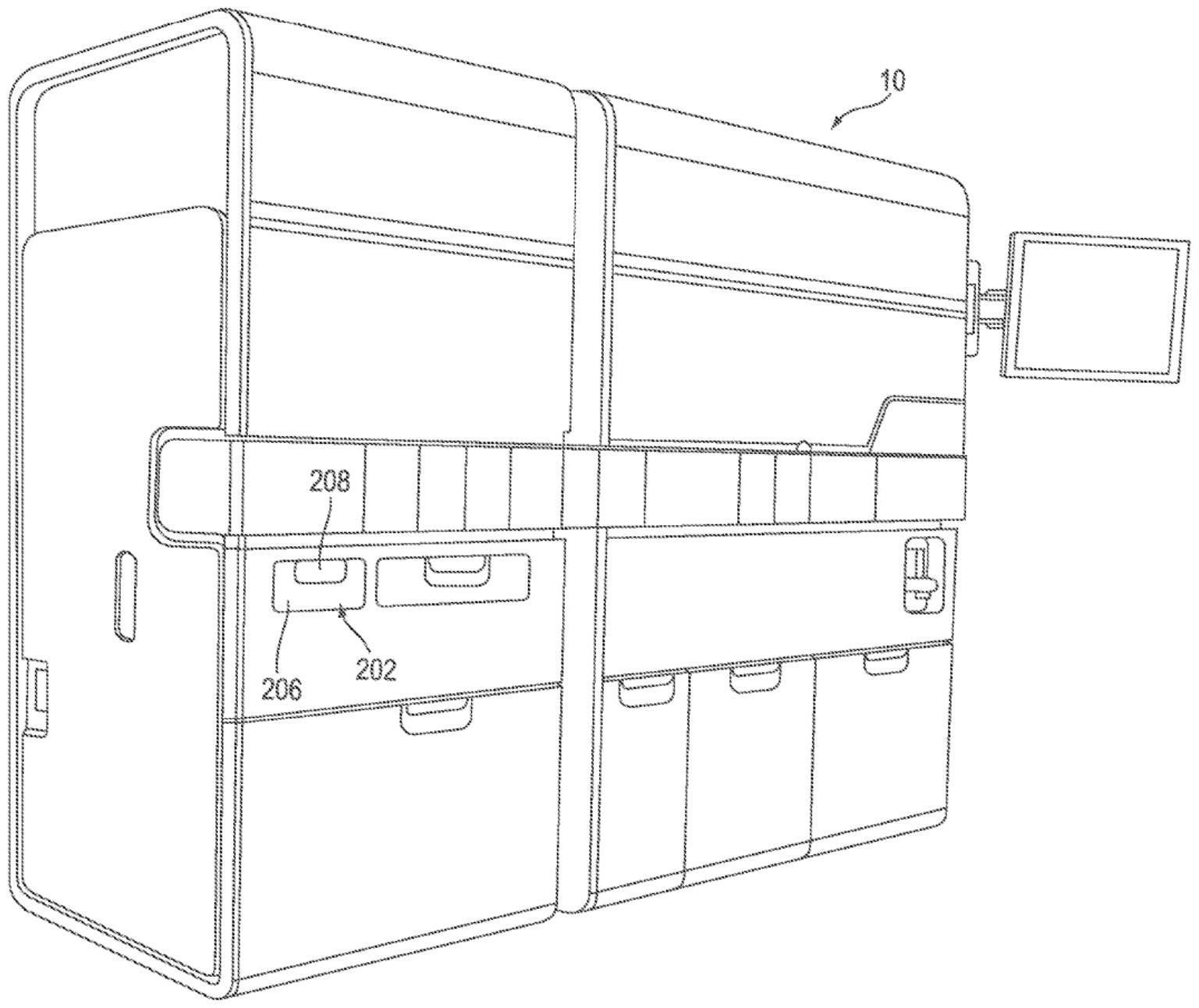
132、图1是其中可采用本文所述的流体容器管理系统的仪器的透视图。
133、图2是如本文所述的流体容器管理系统的示意性图示。
134、图3是可在流体容器管理系统中管理的流体容器的顶部透视图。
135、图4是容器的底部透视图。
136、图5是沿着图3中的线5-5的容器的横截面。
137、图6是从仪器延伸的容器装载接口的支撑平台的局部透视图。
138、图7是容器装载接口的顶部后侧透视图。
139、图8是容器装载接口的顶部平面图。
140、图9是容器分配器的顶部透视图。
141、图10是容器分配器的顶部平面图。
142、图11是容器分配器的侧视图。
143、图12是容器分配器的部分横截面的底部透视图。
144、图13是容器分配器的夹持器的顶部平面图,其中一个夹持器指状件被描绘为透明的。
145、图14是夹持器的顶部透视图,其中一个夹持器指状件被描绘为透明的。
146、图15是替代夹持器的局部透视图。
147、图16是容器存储模块的顶部前侧透视图。
148、图17是省略了外壳的容器存储模块的顶部前侧透视图。
149、图18是省略了外壳的容器存储模块的顶部右侧透视图。
150、图19是沿着图16中的线19-19的横截面透视图。
151、图20是容器存储模块的局部右侧内部透视图。
152、图21是容器存储模块内的容器存储运输件的顶部透视图。
153、图22是容器存储运输件的固持站和待插入到固持站中的容器的局部平面图。
154、图23是容器固持站的局部内部透视图,示出了容器存储运输件、多功能马达、耦接到多功能马达的从动块和支架、由从动块致动的容器压紧臂、以及容器定位坡道中的全部或一部分。
155、图24是容器固持站的局部横截面内部视图,示出了容器存储运输件、多功能马达、耦接到多功能马达的从动块和支架、以及容器定位坡道中的全部或一部分。
156、图25是废物处理模块的顶部透视图。
157、发明详述
158、虽然本公开主题的方面可以多种形式体现,但以下描述和附图仅意图公开这些形式中的一些作为主题的具体实例。因此,本公开的主题并不意图限于如此描述和说明的形式或实施例。
159、除非另外定义,否则本文所使用的所有领域术语、符号和其他技术术语或专门用语具有与本公开所属领域的普通技术人员通常所理解的含义相同的含义。本文所提及的所有专利、专利申请、公开专利申请和其它公开案都以全文引用的方式并入。如果此部分中阐述的定义与以引用的方式并入本文中的专利、申请、公开申请和其它公开案中阐述的定义相反或不一致,那么此部分中阐述的定义优先于以引用的方式并入本文中的定义。
160、定义
161、除非另外指示或上下文另外表明,否则如本文所用,“一(a/an)”意味着“至少一个”或“一或多个”。
162、本说明书可以使用描述相对空间布置和/或定向或方向的各种术语来描述部件、设备、位置、特征或其部分的定位和/或定向,或移动、力或其它动态作用的方向。除非特别说明或本说明书的上下文另外规定,否则这类术语,包含但不限于顶部(top)、底部(bottom)、上方(above)、下方(below)、下面(under)、顶部上(on top of)、上部(upper)、下部(lower)、左侧、右侧、前方、后方、紧靠(next to)、相邻(adjacent)、在……之间、水平、竖直、对角线、纵向、横向、径向、轴向、顺时针、逆时针等,是用于方便地提及图式中的这类部件、设备、位置、特征或其一部分,或移动、力或其它动态作用,并且不意图具有限制性。
163、除非另外指示或上下文另外表明,否则本文中用于描述第一部件、结构或其部分与第二部件、结构或其部分之间的物理和/或空间关系的术语,例如附接、连接(connect)、固定、接合(join)、连接(link)、联接或类似术语或这类术语的变化形式,应涵盖其中第一部件、结构或其部分与第二部件、结构或其部分直接接触的直接关系,或第一部件、结构或其部分与第二部件、结构或其部分之间存在一个或多个中间部件、结构或其部分。
164、除非另外说明,否则在本说明书中提及的任何特定尺寸仅代表体现本公开的方面的装置的示例性具体实施,并且并不意图具有限制性。
165、在本文所使用的程度内,术语“邻近(adjacent)”是指接近或邻接。相邻的对象可彼此隔开,或可彼此实际或直接接触。在一些情况下,相邻的对象可彼此联接或可彼此一体地形成。
166、在本文所使用的程度内,术语“大体上(substantially)”和“大体(substantial)”是指相当大的度或程度。当与例如事件、情况、特性或属性结合使用时,所述术语可指事件、情况、特性或属性精确发生的实例,以及事件、情况、特性或属性接近发生的实例,例如考虑到本文描述的实施例的典型公差水平或可变性。
167、在本文所用的程度内,“分子测定”是指用于专门检测和/或定量靶标分子(诸如靶标核酸)的程序。包含或疑似包含靶标分子的样品与一种或多种试剂(包括至少一种对靶标分子具有特异性的试剂)接触,并且经受准许产生指示靶标分子是否存在的可检测信号的条件。例如,当分子测定是聚合酶链式反应(pcr)时,试剂包括对靶标具有特异性的引物,并且可检测信号的产生可以至少部分地通过提供标记探针来完成,该标记探针在靶标存在的情况下与引物产生的扩增子杂交。替代性地,试剂可以包括用于检测双链核酸的形成的嵌入染料。
168、在本文所用的程度内,“试剂”是指参与分子测定的任何物质或其组合,样品材料和测定产物除外。示例性试剂包括核苷酸、酶、扩增寡聚物、探针和盐。
169、在本文所用的程度内,“测定”是指用于检测和/或定量样品中靶标分子或分析物的程序。包含或疑似包含靶标分子的样品与一种或多种试剂接触,并且经受准许产生指示样品中是否存在靶标分子或样品中的靶标分子的量的可检测信号的条件。
170、如本文所用,“样品”是指疑似包含感兴趣的生物体、病毒或细胞的任何物质、或替代性地,源自感兴趣的生物体、病毒或细胞的分析物、或疑似包含感兴趣的分析物的任何物质。该物质可以是例如未经处理的临床标本,诸如血液或泌尿生殖道标本、包含标本的缓冲介质、包含标本的介质和用于释放属于生物体、病毒或细胞的分析物的溶解剂、或包含源自生物体、病毒或细胞的分析物,该分析物已在容器中或者材料或装置上分离和/或纯化(“提取”)。出于这个原因,术语“样品”将被理解为意味着呈其原始形式的标本或任何处理阶段以释放、分离和纯化(“提取”)源自生物体、病毒或细胞的分析物。因此,提及“样品”可指处于不同处理阶段的疑似包含源自生物体、病毒或细胞的分析物的物质,并且不限于该物质的初始形式。
171、“核酸”和“多核苷酸”是指包括核苷或核苷类似物的多聚体化合物,这些核苷或核苷类似物具有连接在一起以形成包括常规rna、dna、混合的rna-dna和其类似物的聚合物的多核苷酸的含氮杂环碱基或碱基类似物。核酸“骨架”可以由多种连接构成,包括以下各项中的一者或多者:糖-磷酸二酯连接、肽-核酸键(“肽核酸”或pna;国际公开案第wo 95/32305号)、硫代磷酸酯连接、甲基膦酸酯连接或其组合。核酸的糖部分可以是核糖、脱氧核糖,或具有取代(例如,2'甲氧基和/或2'卤化物取代)的类似化合物。含氮碱基可以是常规碱基(a、g、c、t、u),其类似物(例如,肌苷或其它,参见the biochemistry of the nucleicacids 5-36,adams et al.,ed.,11th ed.,1992);嘌呤或嘧啶的衍生物(例如,n4-甲基鸟嘌呤、n6-甲基腺嘌呤、去氮杂-或氮杂-嘌呤、去氮杂-或氮杂-嘧啶、在5或6位置具有取代基的嘧啶碱基(例如,5-甲基胞嘧啶)、在2、6或8位置具有取代基的嘌呤碱基、2-氨基-6-甲基氨基嘌呤、o6-甲基鸟嘌呤、4-硫代-嘧啶、4-氨基-嘧啶、4-二甲基肼-嘧啶和o4-烷基-嘧啶;美国专利第5,378,825号和国际公开案第wo 93/13121号)。核酸可以包括一个或多个“无碱基”残基,其中骨架不包括用于聚合物的一个或多个位置的含氮碱基(美国专利第5,585,481号)。核酸可以仅包括常规的rna或dna糖、碱基和键,或可以包含常规的组分和取代(例如,具有2’甲氧基键的常规碱基,或含有常规碱基和一种或多种碱基类似物两者的聚合物)。核酸包括“锁定核酸”(lna),一种包含一种或多种lna核苷酸单体的类似物,其中二环呋喃糖单元被锁定在模拟糖构型的rna中,这增强了对互补rna和dna序列的杂交亲和力(vester and wengel,2004,biochemistry 43(42):13233-41)。可影响杂交复合物的稳定性的寡聚物的实施例包括pna寡聚物、包括经2'-甲氧基或2'-氟取代的rna的寡聚物、或影响杂交复合物的总电荷、电荷密度或空间缔合的寡聚物,包括包含带电连接(例如,硫代磷酸酯)或中性基团(例如,甲基磷酸酯)的寡聚物。除非另外指示,否则甲基化胞嘧啶(诸如5-甲基胞嘧啶)可以与包括rna或dna骨架(或其混合物)的任何前述骨架/糖/连接结合使用。rna和dna等效物具有不同的糖部分(即,核糖与脱氧核糖),并且可能因rna中存在尿嘧啶和dna中存在胸腺嘧啶而有所不同。rna和dna等效物之间的差异不会导致同源性差异,因为等效物对特定序列具有相同程度的互补性。应当理解,当提及针对寡核苷酸、扩增子或其它核酸的长度的范围时,该范围包括所有整数(例如,连续核苷酸的长度为19至25,包括19、20、21、22、23、24和25)。
172、“核酸扩增”或简称“扩增”是指产生目标核酸序列或其互补序列或其片段(即,包含少于完整靶标核酸的经扩增的序列)的多拷贝的任何体外程序。扩增方法包括例如复制酶介导的扩增、聚合酶链式反应(pcr)、连接酶链式反应(lcr)、链置换扩增(sda)、解旋酶依赖性扩增(hda)、转录介导的扩增(tma)、和基于核酸序列的扩增(nasba)。tma和nasba都是基于转录的扩增形式。复制酶介导的扩增使用自复制rna分子和复制酶,诸如qb复制酶(参见例如美国专利第4,786,600号)。pcr使用dna聚合酶、引物对和热循环来合成dsdna的两条互补链的多个拷贝或从cdna合成(参见例如美国专利第4,683,195号、第4,683,202号和第4,800,159号)。lcr使用四种或更多种不同的寡核苷酸以通过使用杂交、连接和变性的多个循环来扩增靶标和其互补链(参见例如美国专利第5,427,930号和第5,516,663号)。sda使用包含针对限制性核酸内切酶的识别位点的引物和切割包括靶标序列的半修饰dna双链体的一条链的核酸内切酶,从而在一系列引物延伸和链置换步骤中发生扩增(参见例如美国专利第5,422,252号、第5,547,861号和第5,648,211号)。hda使用解旋酶来分离dna双链体的两条链,从而产生单链模板,随后杂交与模板杂交的序列特异性引物,并且通过dna聚合酶延伸以扩增靶标序列(参见例如美国专利第7,282,328号)。基于转录的扩增使用dna聚合酶、rna聚合酶、脱氧核糖核苷三磷酸、核糖核苷三磷酸、包含启动子的寡核苷酸,并且任选地可以包括其它寡核苷酸,以最终从核酸模板产生多个rna转录本。基于转录的扩增的示例在美国专利第4,868,105号、第5,124,990号、第5,130,238号、第5,399,491号、第5,409,818号和第5,554,516号中有所描述;并且在国际公开案第wo 88/01302号、第wo 88/10315号和第wo 95/03430号中描述。扩增可以是线性的或指数的。
173、在实时检测扩增子的循环扩增方法中,术语“阈值循环”(ct)是与靶标的扩增相关联的信号的出现时间的量度,并且例如可以是经归一化的报告信号的大约10倍标准偏差。一旦扩增达到“阈值循环”,就通常认为是探针所结合的序列的正扩增产物。探针的结合通常提供关于产物的身份的大体信息(例如,在一个或多个等位基因特异性探针的情况下,它是来自特定靶标序列的扩增子或基因的某一类等位基因的成员)。扩增产物可以附加地通过本领域技术人员已知的方法,诸如凝胶电泳、核酸测序和其它此类分析程序进一步表征。
174、“寡聚物”或“寡核苷酸”是指通常小于1,000个核苷酸(nt)的核酸,包括下限为约2nt至5nt且上限为约500nt至900nt的大小范围中的那些核酸。一些特定实施例是下限为约5nt至15nt、16nt、17nt、18nt、19nt或20nt且上限为约50nt至600nt的大小范围中的寡聚物,并且其它特定实施例是处于下限约为10nt至20nt且上限约为22nt至100nt的大小范围中。寡聚物可以从天然存在的来源纯化,但是也可以使用任何众所周知的酶促或化学方法来合成。寡聚物可以由功能名称(例如,捕获探针、引物或启动子引物)来指代,但是本领域技术人员将理解,此类术语是指寡聚物。寡聚物可以通过自杂交或通过与其它多核苷酸杂交形成二级和三级结构。此类结构可以包括但不限于双链体、发夹、十字形、弯曲体和三链体。寡聚物可以以任何方式产生,包括化学合成、dna复制、逆转录、pcr或其组合。在一些实施例中,形成侵入性切割结构的寡聚物在反应中产生(例如,通过在酶促延伸反应中延伸引物)。
175、“扩增子”或“扩增产物”是指在核酸扩增反应中产生的并源自靶标核酸的核酸分子。扩增子或扩增产物包含可以与靶标核酸具有相同或相反意义的靶标核酸序列。在一些实施例中,扩增子具有约100个至2000个核苷酸、约100个至1500个核苷酸、约100个至1000个核苷酸、约100个至800个核苷酸、约100个至700个核苷酸、约100个至600个核苷酸或约100个至500个核苷酸的长度。
176、“扩增寡核苷酸”或“扩增寡聚物”是指与靶标核酸或其互补物杂交并参与核酸扩增反应的寡核苷酸,例如,充当引物和/或启动子-引物。特定扩增寡聚物包含至少10个连续碱基,并且任选地至少11个、12个、13个、14个、15个、16个、17个、18个、19个或20个连续碱基,它们与靶标核酸序列的区或其互补链互补。连续碱基可以与扩增寡聚物所结合的靶标序列至少80%、至少90%或完全互补。在一些实施例中,扩增寡聚物包括在互补序列的两个区段之间的间插接头或非互补序列,例如,其中寡聚物的两个互补区段共同包括至少10个互补碱基,并且任选地至少11个、12个、13个、14个、15个、16个、17个、18个、19个或20个互补碱基。本领域技术人员将理解,所列举的范围包括该范围内的所有整数和有理数(例如,92%或98.377%)。特定扩增寡聚物是10个至60个碱基长,并且可以任选地包括修饰的核苷酸。
177、“引物”是指与模板核酸杂交并具有通过聚合延伸的3'端的寡聚物。引物可以任选地被修饰,例如,通过包括与目标序列非互补的5'区。此类修饰可以包括功能性添加,诸如标签、启动子或可以用于或可用于操纵或扩增引物或靶标寡核苷酸的其它序列。并入标签的引物或标签和启动子序列的示例在美国专利第9,284,549号中描述。用5'启动子序列修饰的引物可称为“启动子-引物”。分子生物学或生物化学领域的普通技术人员将理解,可以用作引物的寡聚物可以被修饰为包括5’启动子序列,然后用作启动子-引物,并且类似地,任何启动子-引物都可以充当具有或不具有其5’启动序列的引物。
178、如本文所用的“检测寡聚物”或“检测探针”是指与靶标核酸相互作用以形成可检测复合物的寡聚物。探针的靶标序列通常是指探针与其特定杂交的较大序列(例如,基因、扩增子、基因座等)内的特定序列。检测寡聚物可以包括靶标特异性序列和非靶标互补序列。此类非靶标互补序列可以包括将赋予所需二级或三级结构,诸如瓣片或发夹结构的序列,该序列可以用于促进检测和/或扩增(例如,美国专利第5,118,801号、第5,312,728号、第6,835,542号、第6,849,412号、第5,846,717号、第5,985,557号、第5,994,069号、第6,001,567号、第6,913,881号、第6,090,543号和第7,482,127号;国际公开案第wo 97/27214号和第wo 98/42873号;lyamichev et al.,nat.biotech.,17:292(1999);and hall etal.,pnas,usa,97:8272(2000))。所限定的序列的探针可以通过本领域普通技术人员已知的技术产生,诸如通过化学合成,以及通过来自重组核酸分子的体外或体内表达。
179、如本文所用的“标记”或“可检测标记”是指被检测到的或引发可检测信号的部分或化合物。标记可以直接或间接连接到探针,或者该标记可以是例如嵌入染料(例如green)。直接连接可以使用共价键或非共价相互作用(例如,氢键、疏水或离子相互作用,以及螯合物或配位复合物形成),而间接连接可以使用桥接部分或接头(例如,经由抗体或附加的寡核苷酸)。可以使用任何可检测部分,例如,放射性核素、配体诸如生物素或抗生物素蛋白、酶、酶底物、反应基团、发色团诸如赋予可检测颜色的染料或颗粒(例如,乳胶或金属珠)、发光化合物(例如生物发光的、发磷光的或化学发光的化合物)以及荧光化合物(即,荧光团)。荧光团的实施例包括吸收495nm至690nm范围内的光(例如,具有峰值吸收波长)并发射520nm至710nm范围内的光(例如,具有峰值发射波长)的荧光团,这些荧光团包括已知的(橙色或红色)、和化合物。荧光团可以与淬灭剂分子结合使用,该淬灭剂分子在接近于荧光团时吸收光以减少背景荧光。此类淬灭剂在本领域中是众所周知的,并且包括例如black hole(或)、blackberry(或)、或tamratm化合物。特定实施例包括在均质系统中可检测的“均质可检测标记”,其中混合物中结合的标记探针与未结合的标记探针相比表现出可检测变化,这允许检测标记而无需从未杂交的标记探针物理移除杂交的标记探针(例如,美国专利第5,283,174号、第5,656,207号和第5,658,737号)。示例性均质可检测标记包括化学发光化合物,该化学发光化合物包括吖啶酯(“ae”)化合物,诸如众所周知的标准ae或ae衍生物(美国专利第5,656,207号、第5,658,737号和第5,639,604号)。合成标记、将标记附接到核酸以及检测来自标记的信号的方法是已知的(例如,sambrook et al.,molecular cloning,a laboratory manual,2nd ed.(cold springharbor laboratory press,cold spring harbor,ny,1989)at chapt.10、以及美国专利第5,658,737号、第5,656,207号、第5,547,842号、第5,283,174号、第5,585,481号、第5,639,604号和第4,581,333号、以及欧洲专利第0 747 706号)。其它可检测标记探针包括fret盒、探针以及在靶标核酸存在的情况下经历构象变化的探针,诸如分子炬和分子信标。fret盒在美国专利申请公开案第2005/0186588号和美国专利第9,096,893号中描述。探针包括供体和受体标记,其中在扩增期间酶促降解探针时检测荧光,以便从淬灭剂的存在中释放荧光团。用于执行taqman测定的化学品在2018年3月23日提交的pct申请第pct/us2018/024021号和美国专利第5,723,591号中描述。分子炬和信标以开放和封闭构造存在,其中封闭构造淬灭荧光团,并且开放位置将荧光团与淬灭剂分离以允许可检测荧光信号的变化。与靶标的杂交打开了原本封闭的探针。分子炬在美国专利第6,361,945号中描述;分子信标在美国专利第6,150,097号中描述。
180、如本文所用的“重构溶液”是指可以用于溶解另一物质,诸如干燥物质(例如,冻干物)的溶剂(包括水、有机溶剂和其混合物)或缓冲液。如本文所用的术语“重构溶液”和“溶剂”可以可互换地使用,术语“重构”和“溶解”也可以可互换地使用。
181、如本文所用的术语“冻干(lyophilization)”、“冻干的(lyophilized)”和“冷冻干燥(freeze-dried)”是指首先将待干燥的材料冷冻,然后在真空环境中通过升华去除冰或冷冻溶剂的过程。“冻干物”是指冻干的材料。“冻干试剂”是包括至少一种试剂的冻干物。
182、系统概述
183、本文描述了一种流体容器管理系统,该流体容器管理系统有助于将流体容器(例如,包含试剂或其它处理流体的容器,诸如小瓶)手动引入到处理仪器,之后将容器从容器装载接口自动传送到容器存储模块,存储容器(例如,在温度受控的环境中),从每个容器自动传送受控量的容器的内容物并监测每个容器内所含的流体的量,以及当容器为空或不再使用时自动丢弃该容器。可以并入该系统的处理仪器可以是用于执行生物、化学、生化或其它多步骤分析过程的分析器,诸如图1所示的用于执行基于核酸的扩增反应的分子分析器10。示例性处理仪器包括美国专利第8,731,712号和第9,732,374号以及国际公开案第wo2019/014239 a1号中所述的分析器,以及购自豪洛捷股份有限公司(hologic,inc.)(马萨诸塞州ma)的panther系统。
184、流体容器管理系统的主要部件或模块示意性地在图2中示出。通常,该系统包括容器装载接口200、容器分配器300、容器存储模块400和容器处理模块550。尽管容器装载接口200、容器分配器300、容器存储模块400和容器处理模块550被描述为流体容器管理系统的一部分,但是模块200、300、400和500中的每一个都能够独立操作,或者模块中的两个或更多个但不是全部可以一起操作。
185、装载接口200通常包括支撑在可移动支撑平台202上的容器装载运输件214。支撑平台202可在可接近位置与不可接近位置之间移动,该可接近位置例如以抽屉样的方式从处理仪器10延伸,如在图2中以实线示出,其中容器装载运输件214是用户可接近的,该不可接近位置在图2中以虚线示出,其中容器装载运输件214被设置在处理仪器10内的支撑框架204内并且是用户不可接近的。形成在支撑框架204中的传送开口220允许容器从容器装载运输件214和装载接口200移除。任选的扫描器230被构造成扫描容器装载运输件214上所承载的每个容器100上的机器可读识别信息(例如,条形码(1d或2d)或rfid标签)。
186、容器存储模块400包括在其中限定腔室的外壳或罩壳402。外壳402内的腔室可以是温度受控的,并且容器存储模块400可以包括用于控制外壳402内的温度的装置,诸如外壳402的一个或多个壁中的绝缘件、加热和/或冷却元件(诸如珀耳帖装置)、温度分布或耗散部件(诸如散热器和/或空气循环风扇)、温度感测元件、以及接收和处理来自温度感测元件的数据并将操作信号传输到加热和/或冷却元件的温度控制电路。包含在外壳402内并且在其中以虚线示出的容器存储运输件418被构造成承载多个容器并且在外壳402内运输这些容器。容器进入/脱离开口406准许容器插入外壳402中或从其移除。形成在外壳402的顶部壁中的容器接近开口408允许接近与开口408对准的容器100,诸如通过移液器。
187、容器分配器300包括分配器头部304,该分配器头部具有用于通过传送开口220抓握容器装载运输件214上所承载的个别容器的机构。分配器头部304是一种机构,该机构被构造成从容器装载运输件214移除容器100,固持移除的容器100并将其传送到容器存储模块400的容器进入/脱离开口406(例如,通过使分配器头部304围绕旋转轴线θ旋转),打开覆盖进入/脱离开口406的门或其它屏障,并且将容器100插入外壳402中和容器存储运输件418上。分配器头部304进一步被构造成打开覆盖进入/脱离开口406的门或其它屏障,通过容器存储模块400的进入/脱离开口406从容器存储运输件418移除容器100,将容器100传送到废物处理模块550,并且将容器100放入废物处理模块550中。
188、下文描述了每个部件或模块的进一步的细节。
189、流体容器
190、图3至图5示出了可以与本文所述的系统一起使用的示例性流体容器100。容器100可以包括底座102和设置在底座102的顶部端部上的盖子120。底座102和盖子120可以由合适的可模制材料制成,该可模制材料包括各种塑料,诸如聚丙烯或环烯烃共聚物、聚乙烯、聚碳酸酯、丙烯酸或聚氯乙烯(pvc),并且底座102和盖子120可以是注射模制的。
191、参考图4和图5,底座102包括器皿110,该器皿被构造成容纳流体并从底座102的顶部端部纵向延伸,并且包括侧壁114和在器皿110的底部端部118处的底部壁116。在所示出的实施例中,器皿110具有管状或圆柱形侧壁114(即,圆形横向轮廓)和圆形的内部凹形底部壁116。器皿110可以具有不同的形状和构造,诸如方形或矩形横向轮廓和/或平坦底部壁。
192、容器100的底座102进一步包括包围器皿110的裙部130。在各种实施例中,裙部130具有在器皿110的底部端部118下方延伸的平坦底部边缘。因此,当裙部130的底部边缘被支撑在平坦表面上时,容器100可以在直立位置上自平衡。裙部130可以包括部分地包围器皿110并具有底部边缘134的第一壁区段132,并且第一区段132的底部边缘134的至少一部分在器皿110的底部端部118下方延伸。
193、第一壁区段132可以包括形成于其中并从第一壁区段132的底部边缘134向上延伸的对准凹口136。容器100可以被承载在机架、货架、输送机、转盘(例如,容器装载运输件214或容器存储运输件418)等的凹陷凹穴内,并且叉状物或其它向内延伸部可以被设置在凹陷凹穴内,以延伸进入并接合放置在凹穴内的容器100的对准凹口136,以由此迫使容器100在凹穴内具有特定所要定向,并限制容器100在凹穴内旋转或以其它方式移动。
194、裙部130可以进一步包括具有底部边缘142的第二壁区段138。第二壁区段138可以包括其上可以固定有标记141的标记板140,该标记可以印有与容器100和/或其内容物相关的标识或其它信息标记,并且可以包括机器可读标记,诸如条形码或射频id标签(“rfid”)。第二壁区段138的底部边缘142可以与第一壁区段132的底部边缘134邻接。
195、参考图3和图4,裙部130进一步包括形成在底座102的相对侧上的凹槽144、146,这些凹槽优选地大致彼此平行并且可以相对于细长器皿110的定向竖直地或纵向地定向,如图所示。凹槽144是v形的,并且可以由朝向凹槽144的根部156会聚的外部凸形表面(即,凹槽的侧面或壁)限定。凹槽144的根部156是凹槽144的一个壁与凹槽144的相对壁之间的过渡。一个会聚表面可以包括第一壁区段132的一部分,而相对的会聚表面可以包括第二壁区段138的一部分。根部156由此将第一壁区段132和第二壁区段138分离。类似地,凹槽146是v形的,并且可以由朝向凹槽146的根部158会聚的外部凸形表面(即,凹槽的侧面或壁)限定。一个会聚表面可以包括第一壁区段132的一部分,而相对的会聚表面可以包括第二壁区段138的一部分。根部158由此将第一壁区段132和第二壁区段138分离。
196、凹槽144、146提供将由机械夹持器机构接合的表面特征,如下面将描述,以准许容器100由包括机械夹持器机构的容器传送机构(诸如容器分配器300)固持和传送。另外,凹槽144、146定位成与容器100的相对端部或侧面相比更靠近容器100的一个端部或侧面。例如,如图3和图4所示,凹槽144、146定位成与容器100的左侧或端部相比更靠近右端部或侧面(当容器处于直立定位时,如图3所示)。凹槽144、146的这种偏心定位允许夹持器机构从凹槽所位于的同一侧(即,从图3中的右侧)接合凹槽144、146,以将容器100横向插入容器固持器中,该容器固持器被构造成允许夹持器机构接近凹槽144、146。容器固持器可以被构造成通过使容器的凹槽144、146所位于的一侧暴露以准许由夹持器机构接合凹槽而允许接近凹槽144、146。
197、参考图3,盖子120包括覆盖壁122,该覆盖壁中形成有大致与器皿110对准的盖子孔口124。隔片126可以被设置在盖子120与盖子孔口124下方的底座102之间。隔片126可以包括多个狭缝128,该多个狭缝穿过隔片126的一部分形成,以准许刚性仪器,诸如移液器的安装轴杆(未示出)穿过隔片126并进入器皿110。
198、可以并入容器100中的附加特征在美国临时申请第62/994,552号中描述。
199、容器装载接口
200、可以包括在容器装载接口200中的附加特征在图6至图8示出。可移动支撑平台202可以包括抽屉,该抽屉包括抽屉前面板206和抽屉框架210,该抽屉框架被支撑在设置在仪器10内的支撑框架204内的线性轨道212(例如,线性轴承)上。尽管可移动支撑平台202不一定必须包括抽屉,但为了简单起见,参考标号202将用于泛指可移动支撑平台或专指抽屉。
201、可以通过用户抓握并拉动形成在抽屉的前板206中的把手208而将抽屉202从仪器10手动拉出,如图6所示。之后可以通过推动把手208或前板206以将抽屉202推回到仪器10内的支撑框架204中而闭合抽屉202。如图7所示,抽屉202可以任选地包括线性阻尼器222(例如,齿条和小齿轮阻尼器),以调节抽屉202的移动并防止可能导致容器110脱落或它们的内容物飞溅的突然打开或闭合移动。替代性地,抽屉202可以是电动的,并且可以通过触摸按钮或开关或通过计算机命令而打开和闭合。可以提供自动控制的锁定机构(未示出)以当仪器10运行时或在不希望打开抽屉202的其它时间将抽屉锁定在闭合位置中。可以提供一个或多个传感器,诸如开槽光学传感器(未示出)以产生指示抽屉202处于打开和/或闭合位置的信号。
202、如图7所示,呈转盘形式的容器装载运输件214可以由抽屉202支撑或被支撑在该抽屉内,以围绕中心的、竖直定向的转盘轴线旋转。尽管容器装载运输件214不一定必须包括转盘,但为了简单起见,参考标号214将用于泛指容器装载运输件或专指转盘。装载转盘214可以包括围绕转盘的周边形成的多个容器凹穴216。每个容器凹穴216可以被构造成接纳和固持单个容器100。容器凹穴216在顶部处开放以准许容器100从运输件214上方竖直插入每个容器凹穴216中,并且在它们的外周边(装载转盘214的外周边)处开放以准许容器100相对于转盘旋转轴线横向(例如,相对于转盘旋转轴线径向)穿过传送开口220从容器凹穴216移除。在一个实施例中,如图6所示,容器装载运输件214可以包括标记213,诸如字母数字字符,唯一地标识容器凹穴216中的每一个。
203、在一个实施例中,如图8所示,保持夹236可以被设置在容器凹穴216的相对侧上,以将容器100保持在容器凹穴216内。保持夹236可以是弹性的、弹簧样的构件,该部件接合容器凹穴216中所固持的容器100的凹槽144、146并向外偏转以准许容器100从容器凹穴216横向移除。每个保持夹236可以包括顶部斜面,当容器竖直插入容器凹穴216中时该顶部斜面接合裙部130的底部边缘以横向向外移动夹来准许容器插入容器凹穴216中。当容器100从容器凹穴216横向取出时,形成凹槽144、146的部分的裙部130的侧面的第一壁区段132的部分接触保持夹236,这致使保持夹236彼此分开展开并允许容器100从容器凹穴216移除。
204、每个容器凹穴216可以包括容器定位夹板234,该容器定位夹板接合形成在容器100的裙部130中的凹口136。机器可读标签226(例如,条形码)可以被设置在容器凹穴216本身的内壁上,以当容器凹穴216为空时由扫描器230检测到,由此充当凹穴空信号。
205、装载转盘214的每个容器凹穴216朝向装载转盘214的外周边开放,并且容器100定位在转盘的容器凹穴216内,其中容器100的凹槽144、146位于装载转盘214的外周边处或附近。因此,容器100的凹槽144、146所位于的侧面在装载转盘214的外周边处暴露,并且用接合相对凹槽144、146的配合的指状件或夹持器(可对置夹持器或夹持元件)抓握容器100的夹持器机构能够从位于装载转盘214径向外部的位置接近凹槽。如图8所示,凸纹218可以被设置在每个容器凹穴216的开口的任一侧上以为夹持器机构打开以将容器100的凹槽144、146接合或脱离接合提供间隙。
206、当装载转盘214使容器100旋转经过扫描器230时,扫描器230能够读取设置在每个容器100的标记板140上的机器可读标记(例如,2-d条形码141),如由从图图8中扫描器230发出的发散点划线所示。源自标记的信息,诸如容器的内容物的标识、批号、有效期等,与装载转盘214上的特定位置相关联。在一个具体实施中,在容器100的机器可读标记由扫描器230读取之后,系统控制软件能够在装载转盘214在抽屉202内旋转时监测该容器100的精确位置。除了可以由每个机器可读标记编码的信息之外,操作员还可以能够向系统提供关于每个容器100的内容物或用途的附加信息。该信息可以经由主显示器上的用户输入屏幕提供。替代性地,在容器100由容器分配器300传送到存储模块400之前,标记由扫描器230立即读取,并且标识信息与存储模块400内的特定方位相关联。
207、如图8所示,装载转盘214的动力旋转可以通过耦接到传动带轮(未示出)的装载运输马达224来实现,该驱动带轮通过传动带228同轴地安装到装载转盘214。装载运输马达224可以包括步进马达并且可以包括旋转编码器225。可以提供旋转位置传感器,诸如光学原位传感器232,以检测装载转盘214的原始位置以及任选地一个或多个其它旋转位置。在一个实施例中,原位传感器232包括光学传感器,该光学传感器包括发射器-检测器对,该发射器-检测器对检测从装载转盘214突出的原位旗标(未示出)在发射器与检测器之间的通过。装载转盘214的精确旋转定位可以通过控制系统(计算机化)来实现,该控制系统监测来自传感器232的信号和来自编码器225的编码器计数并且产生呈马达移动的指定步数形式的移动命令。因此,当通过读取容器上的标记141而获得关于容器的信息时,从传感器232和编码器225知晓该容器在装载转盘214上的位置。
208、容器分配器
209、示例性容器分配器300的特征在图9至图14中示出。容器分配器300包括分配器头部304,该分配器头部包括分配器头部框架或底架306,该分配器头部框架或底架被安装在支撑框架302上,以便能够围绕与固定到支撑框架302的太阳齿轮388同轴的分配器旋转轴线(底架轴线)“θ”旋转。夹持器托架305承载容器夹持器320,并且能够在相对于分配器旋转轴线θ的径向方向“r”上相对于底架306移动。可以提供柔性电缆314以在旋转分配器头部304与支撑框架302所附接到的结构之间传输电力、数据和命令。如图9所示,分配器移动系统被构造成移动分配器底架306和夹持器托架305,并且在一个实施例中,包括分配器马达382,该分配器马达被安装在附接到分配器头部底架306的马达安装件384上并且包括驱动齿轮386(正齿轮),该驱动齿轮接合固定太阳齿轮388的外周边齿,使得由分配器马达382引起的驱动齿轮386的动力旋转实现分配器头部304围绕轴线θ的旋转。分配器马达382可以包括步进马达并且可以包括旋转编码器383。可以提供旋转位置传感器,诸如图11和图12所示的光学原位传感器315以检测原始位置(例如,如由图9和图11所示的原位旗标317所指示)以及任选地分配器头部304的一个或多个其它旋转位置。分配器头部304的精确旋转定位可以通过控制系统(计算机化)来实现,该控制系统监测来自原位传感器315的信号和来自编码器383的编码器计数并且产生呈马达移动的指定步数形式的移动命令。任选的第一止动销310和任选的第二止动销312从分配器头部底架306的相对端部水平延伸。止动销310、312接触任选的阻挡元件313,以防止可能损坏柔性电缆314的分配器头部304的过度旋转。容器分配器300可以任选地包括致动器臂308,该致动器臂从底架306的一个端部延伸并且包括竖直定向的上部端部,其中在上部端部的一侧上形成销凹口309。
210、分配器头部306的容器夹持器320被构造成以直立定位抓握和固持容器100,如图9至图14所示。夹持器320包括可对置夹持器或夹持元件,该对置夹持器或夹持元件包括第一夹持器指状件或夹持器或夹持元件322和第二夹持器指状件或夹持器或夹持元件334。第一夹持器指状件322包括在第一夹持器指状件322的端部处接合容器100的凹槽144的第一挂钩332,并且第二夹持器指状件334包括在第二夹持器指状件334的端部处接合容器100的凹槽146的第二挂钩340。
211、第一夹持器指状件322在第一枢转安装件(例如,杆、轴杆或销)323处可枢转地安装到夹持器托架305的夹持器指状件安装支架321。第一枢转安装件323大致位于第一夹持器指状件322的与挂钩332相对的纵向端部处,并且支撑第一夹持器指状件322,以围绕延伸穿过第一枢转安装件323的第一夹持器旋转轴线进行枢转旋转。类似地,第二夹持器指状件334在第二枢转安装件(例如,杆、轴杆或销)335处可枢转地安装到夹持器指状件安装支架321。第二枢转安装件335大致位于第二夹持器指状件334的与挂钩340相对的纵向端部处,并且支撑第二夹持器指状件334,以围绕延伸穿过第二枢转安装件335的第二夹持器旋转轴线进行枢转旋转。通过第一枢转安装件323的第一夹持器旋转轴线和通过第二枢转安装件335的第二夹持器旋转轴线优选地彼此平行,并且在如图所示的实施例中,两者都是竖直定向的。夹持器320被构造成以枢转方式将第一夹持器指状件322和第二夹持器指状件334朝向彼此移动以抓握容器100,或将第一夹持器指状件322和第二夹持器指状件334彼此分开以释放容器100。第一指状件耦接齿轮330附接到第一夹持器指状件322,并且包括通过第一枢转安装件323与第一夹持器旋转轴线同轴的正齿轮。类似地,第二指状件耦接齿轮338附接到第二夹持器指状件334,并且包括通过第二枢转安装件335与第二夹持器旋转轴线同轴的正齿轮。第一指状件耦接齿轮330和第二指状件耦接齿轮338相互接合,使得第一夹持器指状件322或第二夹持器指状件334的旋转引起另一个指状件在相反的旋转方向上的对应的配合旋转(即,第一夹持器指状件322的旋转致使第二夹持器指状件334的相等且相反的旋转)。
212、第一夹持器指状件322的第一挂钩332相对于第一夹持器指状件322的纵向方向(即,第一夹持器指状件的可枢转地安装在第一枢转安装件323处的第一端部与第一夹持器指状件的第一挂钩332所位于的第二端部之间的方向)横向地或横切地弯曲。类似地,第二夹持器指状件334的第一挂钩340相对于第二夹持器指状件334的纵向方向(即,第二夹持器指状件的可枢转地安装在335处的第一端部与第二夹持器指状件的第二挂钩340所位于的第二端部之间的方向)横向地或横切地弯曲。第一挂钩332和第二挂钩340在相反方向上向内朝向彼此弯曲。在一个实施例中,第一挂钩332和第二挂钩340中的每一个的横向范围至少等于凹槽144、146中的每一个的深度,使得每个挂钩的尖端分别安置在凹槽144或146的相应根部156或158中。凹槽144、146中的每一个的v形形状将致使对应的第一挂钩332和第二挂钩340楔入相应凹槽中,由此使夹持器320能够牢固地抓握容器100。第一挂钩332和第二挂钩340中的每一个都可以具有v形远侧边缘,该v形远侧边缘与对应凹槽144、146的v形形状吻合,以进一步增强挂钩与凹槽之间的楔入效果。
213、如图9、图11、图12和图14中可了解,第一挂钩332和第二挂钩340中的每一个都具有竖直范围或宽度,使得该竖直范围或宽度接合容器100的相应凹槽144和146的纵向范围,从而使容器100稳定地由夹持器320固持并且不可能相对于夹持器320倾斜。
214、第一夹持器指状件322具有单个第一挂钩332,第二夹持器指状件334具有单个第二挂钩340,它们大致在凹槽的顶部端部与底部端部之间的凹槽144、146的中间部分处分别接合凹槽144、146的纵向范围。在一个替代实施例中,如图15所示,第一夹持器指状件322a可以包括一个挂钩,该挂钩包括两个(或更多个)分离挂钩,诸如上部挂钩332a和下部挂钩332b,这些分离挂钩竖直间隔开并且对准以便可与容器100的凹槽144的上部和下部纵向间隔开的部分接合。类似地,第二夹持器指状件334a可以包括挂钩,该挂钩包括两个(或更多个)分离挂钩,这些分离挂钩竖直间隔开(但在图15中不可见)并且对准以便可与容器100的凹槽146的上部和下部纵向间隔开的部分接合。
215、夹持器弹簧344在第一端部处在弹簧锚324处附接到第一夹持器指状件322(参见图11),延伸穿过形成在第二夹持器指状件334中的弹簧开口336(参见图9),并且在相对端部处附接到弹簧支架346。夹持器弹簧344操作以将夹持器指状件322和334朝向彼此偏置。即,夹持器弹簧344中的张力将第一夹持器指状件322拉向弹簧支架346(并且拉向第一夹持器指状件334)。同时,第一指状件耦接齿轮330与第二指状件耦接齿轮338之间的相互接合致使第二夹持器指状件334在相反方向上朝向第一夹持器指状件322旋转。
216、为了通过将第一夹持器指状件322和第二夹持器指状件334彼此分开移动(或展开)而扩展夹持器320,第一夹持器指状件322抵抗夹持器弹簧344的偏置围绕第一枢转安装件323向外移动(如图10、图13和图14所示的逆时针方向)。在一个实施例中,第一夹持器指状件322抵抗弹簧334的偏置的动力旋转是由夹持器马达348实现,该夹持器马达被安装到马达支架350并且在其输出轴杆上具有夹持器致动器齿轮,诸如蜗轮352,该夹持器致动器齿轮接合夹持器驱动齿轮356(例如,正齿轮),该夹持器驱动齿轮与指状件耦接齿轮330和第一枢转安装件323同轴安装。耦接器354将夹持器马达348的输出轴杆连接到蜗轮352的轴杆,并且允许马达轴杆与蜗轮轴杆之间的略微失配。夹持器驱动齿轮或夹持器元件驱动齿轮356未固定到指状件耦接齿轮330或第一夹持器指状件322,但是被构造成独立于指状耦接齿轮330和第一夹持器指状件322旋转。如图11、图13和图14所示,驱动销326从第一夹持器指状件322向下延伸穿过形成在夹持器驱动齿轮356中的弓形狭槽358,该弓形狭槽具有在径向方向上的略微大于驱动销326的直径的宽度和是驱动销326的直径的多倍的圆周长度。当夹持器马达348和蜗轮352使夹持器驱动齿轮356在逆时针方向上旋转时,夹持器弹簧344在顺时针方向上拉动第一夹持器指状件322的偏置将致使驱动销326接触狭槽358的最靠近第二夹持器指状件334的端部。蜗轮352和夹持器驱动齿轮356在逆时针(展开)方向上的连续旋转将逆时针扭矩施加到第一夹持器指状件322,并且致使第一夹持器指状件322的对应逆时针旋转。在一个实施例中,夹持器马达348将旋转指定步数,以将第一夹持器指状件322从检测到的闭合位置移动所要量。如上所述,第一指状件耦接齿轮330与第二指状件耦接齿轮338之间的相互接合将致使第二夹持器指状件334在相反方向(即,逆时针)上围绕第二枢转安装件335旋转远离第一夹持器指状件322。
217、为了闭合第一夹持器指状件322和第二夹持器指状件334,夹持器马达348使蜗轮352逆向旋转,由此使夹持器驱动齿轮356在顺时针方向上旋转并准许夹持器弹簧344围绕第一枢转安装件323在顺时针方向上拉动第一夹持器指状件322,该夹持器弹簧继续致使驱动销326接触狭槽358的最靠近第二夹持器指状件334的端部。
218、当第一夹持器指状件322在顺时针方向上移动时,由于第一指状件耦接齿轮330和第二指状件耦接齿轮338的相互接合,第二夹持器指状件334对应地围绕第二枢转安装件335在逆时针方向上移动。如果容器100分别被设置在第一夹持器指状件322和第二夹持器指状件334的面向内的挂钩332和340之间,则在挂钩332、340接合容器100的凹槽144、146之后,将阻止夹持器指状件322、334朝向彼此的进一步运动。在第一夹持器指状件322下方延伸的容器存在标签328被定位成遇到容器存在传感器316(例如,断开开槽光学传感器的发射器与接收器之间的光束),由此产生向系统控制器(未示出)的信号,该信号指示第一夹持器指状件322处于对应于容器100存在于第一夹持器指状件322与第二夹持器指状件334之间的位置。在挂钩332、340接合凹槽144、146之后,夹持器马达348可以继续旋转蜗轮352和夹持器驱动齿轮356。但是因为夹持器指状件322、334的进一步闭合旋转移动由它们之间所抓握的容器100阻止,所以驱动销326在狭槽358内移动远离狭槽的最靠近第二夹持器指状件344的端部,由此使驱动齿轮356与驱动销326和第一夹持器指状件322解耦。因此,夹持器驱动齿轮356被准许在夹持器指状件322、334接触容器100之后进一步在顺时针方向上旋转,而不将任何旋转扭矩施加到第一夹持器指状件322,由此避免可能由在夹持器指状件322、334的进一步移动之后继续施加扭矩导致的部件(诸如夹持器320、夹持器驱动齿轮356、蜗轮352和/或夹持器马达348)的损坏。夹持器马达348可以继续旋转,直到固定到夹持器驱动齿轮356并且可与该夹持器驱动齿轮一起旋转的马达止动片360接合马达止动传感器318(例如,断开开槽光学传感器的发射器与接收器之间的光束)以产生向系统控制器的信号以停止夹持器马达348(即,通过指示夹持器指状件322的闭合位置)。马达止动片360从夹持器驱动齿轮356径向向外延伸并在其远侧端部处向下延伸。狭槽358的弓形长度优选地足以准许夹持器驱动齿轮356在夹持器指状件322、334接触容器100之后,并且直到马达止动片360接合马达止动传感器318并且在驱动销326接触狭槽358的相对端部之前旋转。
219、如果当夹持器马达348使蜗轮352逆向旋转并且夹持器弹簧344在顺时针方向上围绕第一枢转安装件323拉动第一夹持器指状件322(并且第二指状件耦接齿轮338对应地在逆时针方向上旋转)时,容器100未定位在第一夹持器指状件322与第二夹持器指状件334之间,则第一夹持器指状件322和第二夹持器指状件334将继续朝向彼此移动,直到夹持器指状件322、334的相应硬止动件325和337彼此接触以阻止指状件的进一步移动(参见图10)。在图13和图14所示的一个替代实施例中,硬止动件325、337被弹簧柱塞394代替,该弹簧柱塞固定到夹持器指状件中的一个(所示出的实施例中的第一夹持器指状件322),并且包括轴向可移动的、弹簧偏置的尖端,该尖端接触另一个夹持器指状件(所示出的实施例中的第二夹持器指状件334)以阻止夹持器指状件322、334朝向彼此的相对移动,同时吸收与接触相关联的震动。
220、由于阻止了第一夹持器指状件322和第二夹持器指状件334朝向彼此的进一步移动,因此当驱动销326在狭槽358内移动时,蜗轮352的继续逆向旋转引起夹持器驱动齿轮356的继续旋转,使得驱动齿轮356与驱动销326和第一夹持器指状件322解耦。因此,蜗轮352和夹持器驱动齿轮356的进一步逆向旋转不会将进一步旋转扭矩施加到第一夹持器指状件322,由此避免可能由在夹持器指状件322、334的进一步移动之后继续施加扭矩导致的部件(诸如夹持器320、夹持器驱动齿轮356、蜗轮352和/或夹持器马达348)的损坏。
221、在所示出的实施例中,夹持器指状件322和334的相应硬止动件325和337被构造成使得如果容器100未定位在夹持器指状件322和334之间,则夹持器指状件322、334将比容器100位于夹持器指状件322、334之间的情况旋转得更远并且更靠近彼此。因此,当容器100不存在时,在第一夹持器指状件322下方延伸的容器存在标签328将穿过容器存在传感器316,并且只会暂时断开传感器316。因此,通过容器存在传感器316由容器存在标签328断开,同时马达止动片360将马达止动传感器318接合到夹持器马达348来确认闭合夹持器320中存在容器100。相反,在马达止动片360接合马达止动传感器318以停止夹持器马达348时,通过来自容器存在传感器316的容器存在信号的不存在来确认闭合夹持器320中不存在容器100。
222、分配器头部304进一步被构造成相对于分配器旋转轴线θ在径向方向“r”上移动夹持器320,其中方向r横切于并且可以垂直于器皿110的大致竖直定向。如图11和图12所示,夹持器推进系统被构造成在横向(例如,径向)方向上移动夹持器托架305和夹持器320,并且在一个实施例中,包括支撑在分配器头部底架306上的线性轨道362,并且在该线性轨道上夹持器托架305和夹持器320被安装以借助于耦接到轨道362的线性轴承364进行线性平移。如图9和图10所示,可以包括步进马达并包括旋转编码器367的夹持器推进马达366被安装到分配器头部底架306,并且夹持器推进马达366的输出轴杆上的驱动齿轮368延伸穿过分配器头部底架306(参见图11和图12)。驱动齿轮368驱动带370,该带被支撑在安装到分配器头部底架306上的惰轮372、373上。在一个实施例中,安装到分配器头部底架306的张紧轮374和安装到可枢转地附接到底架306的张紧支架377的张紧轮375被设置在驱动齿轮368的相对侧上。张紧支架377在379处可枢转地附接到底架306,并且可以通过螺钉380固定在所要位置中,该螺钉穿过形成在支架377中的狭槽延伸到底架306中,以在带370中实现所要张力。带370通过附接夹钳376附接到夹持器托架305,使得当带370由夹持器推进马达366和驱动齿轮368在一个或另一方向上驱动时,夹持器320在r方向上推进或缩回。可以提供一个或多个传感器来检测夹持器托架305的一个或多个径向位置。夹持器320的移动量可以由控制系统监测和控制,该控制系统监测来自编码器367的编码器计数和来自径向位置传感器的位置信号,并产生呈马达移动的指定步数形式的移动命令。
223、在一个实施例中,每个夹持器指状件322、334可以任选地包括固定到其外侧(即,在夹持器指状件的不面向另一个夹持器指状件的一侧上)的导电板378(例如,金属板)。导电板的目的是为了夹持器320和分配器头部304的自学恰当定位,如下所述。
224、容器存储模块
225、可以包括在容器存储模块400中的附加特征在图16至图24中示出。容器存储模块400包括限定内部腔室的罩壳或外壳402,该内部腔室可以是温度受控的,例如,如下所述。在内部腔室是温度受控的情况下,罩壳或外壳402可以是绝缘的。外壳402中的容器进入/脱离开口406允许将容器100放入容器存储模块400的内部腔室中或从该内部腔室移除。如图17和图19所示,当容器未被移入或移出容器存储模块400时,可提供可移动屏障或门410以闭合进入/脱离开口406。在存储模块400的内部腔室是温度受控的情况下,此类屏障或门可能是特别期望的。在一个实施例中,可移动屏障410是滑动门,该滑动门具有从其延伸的推动器销411和穿过其形成的切口413。(另请参见图18)。当分配器头部304围绕其旋转轴线θ旋转以将滑动门410从闭合位置推动到打开位置时,分配器300可以使用接触推动器销411的侧面的分配器头部底架306的致动器臂308打开门410。特别地,分配器头部底架306旋转,直到推动器销411安置在致动器臂308的销凹口309中。之后,具有底架306的分配器在所示出的实施例中在逆时针方向上进一步旋转,由此在所示出的实施例中将可移动屏障410推向左侧,直到形成在可移动屏障410中的切口413与形成在外壳402中的进入/脱离开口406对准,使得可以用夹持器320将容器100插入存储模块400中或从其移除。在一个实施例中,可移动屏障410朝向闭合位置(在所示出的实施例中向右侧)进行弹簧偏置,使得由致动器臂308和分配器头部底架306施加到推动器销411的横向力将抵抗弹簧偏置将门移动到打开位置,并且移除或释放横向力将允许弹簧偏置将门移动到闭合位置。
226、在一个实施例中,分配器头部304可以并入有自学能力以确定分配器头部304相对于进入/脱离开口406的恰当旋转(θ)位置。夹持器320在r方向上延伸到进入/脱离开口406中,并且分配器头部在θ方向上旋转,首先在一个方向上旋转,直到夹持器接触开口406的一侧,然后在相反方向上旋转,直到夹持器320接触开口406的相对侧。夹持器320与开口406一侧的接触可以通过第一夹持器指状件322或第二夹持器指状件334上的导电板378接触开口406的导电侧来检测,由此电路检测从板378到支撑框架302的电连续性。记录夹持器320接触开口406的侧面的分配器头部304的旋转θ位置,以分配器头部304的后续定位,来接触和推动具有致动器臂308的推动器销411,以及将容器放入存储模块400或从其移除。
227、容器存储模块400进一步包括穿过外壳402的顶部壁形成的容器接近开口408。容器接近开口408允许移液器通过该开口插入以接近在接近开口408下方的存储模块400内所固持的容器100的内容物,以从容器100吸出流体和/或检测容器100内的流体的液位(即,量),将如下所述。可以提供可移动屏障以选择性地打开(暴露)容器接近开口408,以准许接近存储模块400内的容器,或者当不需要此类接近时闭合(覆盖)容器接近开口408。在存储模块400的内部腔室是温度受控的情况下,此类屏障可能是特别期望的。下文将描述用于容器接近开口408的示例性屏障的进一步的细节。
228、参考图18和图20,其中外壳402从图式中省略以准许存储模块400的内部部件的可见性,并且参考作为存储模块的横截面的图19,容器存储运输件418被设置在存储模块400内以接纳和承载多个流体容器100。在所示出的实施例中,容器存储运输件418是存储转盘,该存储转盘可以围绕中心、竖直定向的存储转盘轴线旋转,并且具有围绕其外周边布置的多个固持站420。存储转盘418的每个固持站420可以包括弹性弹簧夹,这些弹簧夹将流体容器100可移除地保持在固持站420内。
229、在一个实施例中,如图21和图22所示,存储转盘418可以包括包含多对相对的、面对的弹簧片423a、423b的上部夹环422和包含多对相对的、面对的弹簧片427a、427b的下部夹环426。在一个实施例中,上部弹簧片423a、423b和下部弹簧片427a、427b相对于存储转盘轴线径向向外延伸。弹簧片423a、423b分别包括向内弯曲的转向节424a、424b,并且弹簧片427a、427b分别包括向内弯曲的转向节428a、428a。上部夹环422和下部夹环426被构造成使得上部夹环422的每对弹簧片423a、423b与下部夹环426的对应的一对弹簧片427a、427b对准,以限定每个固持站420。容器100被固持在固持站420中,其中上部夹环422的弯曲转向节424a、424b和下部夹环426的弯曲转向节428a、428b被接合(例如,安置)在容器100的凹槽144、146中。上部转向节424a和下部转向节428a分别在凹槽144的顶部和底部附近接合该凹槽,并且上部转向节424b和下部转向节428b分别在凹槽146的顶部和底部附近接合该凹槽。上部夹环422的弹簧片423a、423b和下部夹环426的弹簧片427a、427b是弹性柔性的,并且当容器100被推入固持站420时彼此偏转分开。偏转弹簧片423a、423b和427a、427b产生促使转向节424a、424b、428a、428a进入凹槽144、146中以将容器100保持在固持站420内的力。
230、图22示出了用于一个容器固持站420的上部夹环422的一对弹簧片423a、423b。弹簧片423a的转向节424a由延伸到第一峰部425a的第一倾斜部分425c和然后从峰部425a延伸的第二倾斜部分425d限定。弹簧片423b的相对转向节424b由延伸到第一峰部425b的第一倾斜部分425e和然后从峰部425b延伸的第二倾斜部分425f限定。容器固持站420的下部夹环426的每对弹簧片427a、427b的相对转向节428a、428b具有类似构造。
231、当容器100首次插入容器固持站420中时,裙部130的与标记板140相对的一侧分别接触转向节424a、424b的第一倾斜部分425c、425e,这致使弹簧片423a、423b彼此展开分开。当容器被推入容器固持站420中时,峰部425a、425b沿着裙部130的第一壁区段132的相对侧滑动,直到峰部425a、425b与凹槽144、146的根部156、158对准,其中弹簧片423a、423b的弹性致使弹簧片寻找其未偏转位置并将转向节424a、424b安置在凹槽144、146中。弹簧片423a、423b被构造成当转向节424a、424b被安置在凹槽144、146中时这些弹簧片仍然略微偏转,以便通过弹簧片423a、423b的弹性在容器100上产生挤压力。当容器100从容器固持站420取出时,形成凹槽144、146的部分的裙部130的侧面的第一壁区段132的部分分别接触转向节424a、424b的第二倾斜部分425d、425f,这致使弹簧片423a、423b再次彼此展开分开以将转向节424a、424b从凹槽144、146提起并且允许容器100从固持站420移除。对容器100插入上部夹环422的弹簧片423a、423b中并从其移除的描述也适用于容器100插入下部夹环426的弹簧片427a、427b中并从其移除,这发生在容器被推入固持站420中并从其移除时。
232、因此,由于上部夹环422的转向节424a、424b和下部夹环426的转向节428a、428b的构造,容器100可以横向插入到容器固持站420中,可以稳定地保持在容器固持站420内,并且可以从容器固持站420横向取出。
233、上部夹环422与下部夹环426之间的间距足以准许夹持器322、334在上部夹环422与下部夹环426之间通过,由此准许分配器300的夹持器320将由夹持器指状件322、334抓握的容器100移动到固持站420中。当容器100被放置在固持站420中时,上部夹环422的转向节424a、424b分别接合夹持器指状件322、334上方的容器100的凹槽144、146,并且下部夹环426的转向节428a、428b分别接合夹持器指状件322、334下方的容器100的凹槽144、146。上部夹环422与下部夹环426之间的间距准许夹持器指状件322、334抓握固持在固持站420中的容器100的凹槽144、146。弹簧片被设定尺寸且构造成使得容器100可以被插入到固持站420中,其中标记板140径向向外,并且上部夹环422的向内弯曲的转向节424a、424b和下部夹环426的向内弯曲的转向节428a428b与容器100的凹槽144和146接合,以将容器100准确定位在固持站420内并将容器100保持在固持站420内。围绕存储转盘418的外周边定位容器100,其中容器径向定向并且凹槽144、146定位在外周边附近,其中存储转盘418上的邻近容器100之间的间距最大,使得夹持器320能够接合每个固持站420中的容器100,而来自被接合的容器的任一侧上的任何容器100的干扰最小。
234、如图21所示,外壳402可以包括绝缘件403,该绝缘件可以包括多孔材料,诸如聚苯乙烯泡沫塑料,或类似绝热材料。
235、存储转盘418可以由存储运输马达432旋转地驱动,存储转盘418与该存储运输马达可操作地耦接。马达432可以被安装到固持站400的顶部支撑板404,并且在其输出轴杆上具有驱动齿轮434(例如,正齿轮),该驱动齿轮接合附接到上部夹环422和下部夹环426的从动正齿轮436的外周边齿轮齿,以便与存储转盘418的旋转轴线同轴。
236、马达432可以包括步进马达并且可以包括旋转编码器433。光学传感器438(参见图20)检测存储转盘418的原始旋转位置。每个容器100的识别信息(如根据由容器装载接口200的扫描器230读取的标记所确定)可以与存储转盘418的特定固持站420相关,如由旋转编码器433和传感器438所确定和监测。存储转盘418的精确旋转定位可以通过控制系统(计算机化)来实现,该控制系统监测来自传感器438的信号和来自编码器433的编码器计数并且产生呈马达移动的指定步数形式的移动命令。
237、在一个替代实施例中,存储转盘418可以由经由带和带轮布置可操作地耦接到存储转盘418的马达驱动。
238、在一个实施例中,如图19和图21所示,存储转盘418可以进一步包括中心柱435,该中心柱在其上部端部处可旋转地安装到顶部支撑面板404,并且在其下部端部处可旋转地安装到存储模块400的框架构件。从动正齿轮436与中心柱435的上部端部同轴布置并附接到该上部端部。圆形下部板437与中心柱435的下部端部同轴布置并附接到该下部端部。下部板437可以包括径向辐条441,该径向辐条提供穿过板437的中心的轴向开口(参见图19)。多个立管439延伸穿过上部夹环422和下部夹环426,并且在它们的上部端部和下部端部处分别附接到从动正齿轮436和下部板437。接近孔443穿过从动齿轮436的外周边形成。一个接近孔443与每个容器固持站420相关联并轴向对准。
239、在一个实施例中,传感器438附接到顶部支撑面板404并且包括l形支架,该支架包括附接到顶部支撑板404的横向或水平部分和从顶部支撑板向下延伸的直立或竖直部分404。光发射器被设置在直立和横向部分中的一个的远侧端部处,并且光接收器被设置在直立和横向部分中的另一个的远侧端部处。光束在直立和横向部分的远侧端部处的光学发射器与接收器之间被引导。因此,当存储转盘418旋转时,转盘上的原始位置处的延伸旗标(未示出)穿过光束并中断传感器的发射器与接收器之间的光束以产生指示旗标存在的信号。替代性地,光束穿过在原始位置处在存储转盘418中形成的开口以产生指示开口存在的信号。这种类型的传感器在国际公开案第wo 2020/181231号中描述。
240、任选地,容器存储模块400的外壳402内的温度控制可以通过各种热控制部件来实现。此类热控制部件可以包括一个或多个热装置,诸如一个或多个珀耳帖装置(热电模块)440,该一个或多个热装置被设置在容器存储运输件418下方,如图19和图20所示。为了维持存储控制模块400的外壳402内的低于环境温度的温度,珀耳帖装置440可以被布置成使得珀耳帖装置440的面向容器存储运输件418的顶部表面是冷表面,并且珀耳帖装置440的底部表面是热表面。冷侧热耗散器,诸如具有多个平行散热片450的散热器448,可以被设置在珀耳帖装置440的顶部上,并且热侧热耗散器,诸如包括多个平行散热片444的散热器442,可以被设置在珀耳帖装置440的底侧上。
241、热控制部件可以任选地包括一个或多个风扇,该一个或多个风扇被设置在外壳402内以循环外壳402内的空气和/或将空气(例如,热空气)排出外壳402。例如,风扇454可以被设置在容器存储运输件或转盘418下方,以便迫使冷空气向上通过形成在容器存储运输件418的中间的开口中心430。此类竖直或轴向引导的流在接触存储转盘418的顶部表面(例如,顶部支撑面板404的底侧)或外壳402时将径向向外偏转,并且沿着外壳402的外侧壁向下传递。风扇454将在散热片450之间或通过形成在散热片450中的切口452径向向内吸入存储转盘418下方的空气。因此,风扇454将在存储转盘418上所承载的容器100周围产生大致环形气流。
242、如图18所示,容器存储模块400可以进一步包括一个或多个风扇456,该一个或多个风扇与热侧热耗散器442邻近以将热空气排出模块400的外壳402。
243、参考图17和图20,用于选择性地覆盖容器接近开口408的可移动屏障可以包括枢转挡板412。挡板412可以包括扇形齿轮,该扇形齿轮在枢转点(例如,螺钉、螺栓、杆、轴杆或销)414处可枢转地安装到顶部支撑面板404并且包括沿着其弧形边缘的齿轮齿416。可以被安装到顶部支撑面板404并且可以包括旋转编码器461的多功能马达460包括安装到其输出轴杆的正齿轮462,该正齿轮接合挡板412的齿轮齿416(另请参见图23和图24)。正齿轮462的旋转致使挡板412围绕枢轴点414在覆盖容器接近开口408的第一位置与未覆盖或暴露容器接近开口408的第二位置之间枢转,这取决于正齿轮462的旋转方向。
244、在挡板412处于第二位置的情况下,移液器的探针或可移除地附接到探针的尖端可以插入通过容器接近开口408和形成在齿轮436中的接近孔443,以接近已由存储转盘418定位在容器接近开口408下方的容器100的流体内容物,以从容器100吸取流体和/或将流体分配到容器100中。
245、还可能希望监测容器100内的流体的液位,并且可以实现这一点的一种方式是通过使用能够进行电容式液位感测的移液器进行流体液位感测。如本领域已知的,例如,如美国专利第5,648,727号所述,电容式液位感测可以通过将具有导电探针或可移除地附接到探针的尖端的移液器下降到容器中所容纳的流体中来执行,该容器被支撑在当监测来自尖端或探针的基于电容的电子信号时电接地的平面。由于尖端与接地平面之间的容器内的流体的介电常数,当尖端接触流体时,测得的基于电容的信号将立即且可检测地发生变化(例如,增加)。当尖端下降时,移液器的竖直(z轴)位置也会在移液器朝向流体的表面下降到容器中时受到监测。在与流体表面接触时,登记来自尖端或探针的基于电容的信号的变化,并且记录移液器的对应竖直位置以确定容器内的液体表面的液位或高度。
246、为了使电容式液位感测有效,液位受监测的容器必须被支撑在导电结构上,以提供与移液器的探针或可移除地附接到移液器的尖端的电容耦接,特别是在容器由非导电材料,诸如塑料制成的情况下。另外,为了可以从移液器的尖端或探针接触流体表面的竖直位置确定容器内的流体液位,容器本身必须处于固定的、已知的和可重复的竖直基准位置。在本文所述的一个实施例中,容器100未被支撑在导电结构上,而是由与容器100的侧面上的凹槽144、146接合的弹簧片423a、423b和427a、427b固持。另外,因为没有支撑容器100的底部的结构,并且因为容器被夹捏在弹簧片423a、423b和427a、427b之间在夹持器320将容器插入固持站420中的位置中,所以每个容器100在其相关联的固持站420内的确切竖直位置可能因容器而异。
247、因此,容器存储模块400包括容器定位器,该容器定位器被构造成接触定位在接近开口408下方的容器100(即,在相对于移液器的液位感测方位中),以迫使容器进入可重复的竖直基准或液位感测位置中。如图20、图23和图24所示,在一个实施例中,容器定位器包括容器定位坡道486,该容器定位坡道被安装在存储转盘418下方和容器接近开口408下方。容器定位坡道486包括具有辊490的倾斜的第一端部488、水平中心部分492和具有辊496的倾斜的第二端部494。当存储转盘418顺时针旋转以将容器100定位在容器接近开口408下方时,容器100将首先遇到倾斜的第一端部488和在倾斜的第一端部488的开始处的辊490。倾斜的第一端部488朝向水平中心部分492向上倾斜,以适应容器100在固持站420中的竖直位置的微小变化(即,如果容器100的裙部130的底部边缘最初低于水平中心部分492)。辊490帮助确保当容器100经过倾斜的第一端部488时平稳过渡并防止容器100接触容器定位坡道486的端部。随着存储转盘418继续旋转,假设容器100的裙部130的底部边缘最初低于水平中心部分492,裙部130的底部边缘从倾斜的第一端部488滑动到水平中心部分492上,使得容器100的裙部130的底部边缘134接触水平中心部分492,这提供容器100的固定的、已知的和可重复的竖直位置,以进行电容式液位感测或用于需要或希望容器100被定位在可重复的竖直基准位置的任何其它目的。也就是说,如果容器100在固持站420中,使得容器100的底部边缘低于水平中心部分492的水平,则倾斜的第一端部488将在固持站420内向上推动容器100,直到容器100的底部边缘处于水平中心部分492的水平。
248、如果存储转盘418逆时针旋转以将容器100定位在容器接近开口408下方时,容器100将首先遇到倾斜的第二端部494和在倾斜的第二端部494的开始处的辊496。倾斜的第二端部494也朝向水平中心部分492向上倾斜,以适应容器100在固持站420中的竖直位置的微小变化(即,如果容器100的裙部130的底部边缘最初低于水平中心部分492)。辊496帮助确保当容器100经过倾斜的第二端部494时平稳过渡并防止容器100接触容器定位坡道486的端部。随着存储转盘418继续旋转,假设容器100的裙部130的底部边缘最初低于水平中心部分492,裙部130的底部边缘从倾斜的第二端部494到水平中心部分492上,使得容器100的裙部130的底部边缘134接触水平中心部分492,这提供容器100的固定的和已知的竖直位置,以进行电容式液位感测或用于需要或希望容器100被定位在可重复的竖直基准位置的任何其它目的。因此,如果容器100在固持站420中,使得容器100的底部边缘低于水平中心部分492的水平,则倾斜的第二端部494将在固持站420内向上推动容器100,直到容器100的底部边缘处于水平中心部分492的水平。
249、容器定位坡道486的形状,即,由倾斜的第一端部488、水平中心部分492、倾斜的第二端部494限定的形状,可以大致符合由存储转盘418移动的容器100所横穿的路径。容器定位坡道486的形状可以是弯曲的,以便对应于容器路径的圆周的曲率,或者每个部分488、492和494可以是直的,并且第一端部488和第二端部494可以相对于中心部分492成角度(例如,钝角),以便接近容器路径的圆周的曲率。辊490和496的旋转轴线可以相对于存储转盘418的旋转轴线大致径向布置。
250、参考图20和图24,在一个实施例中,在正齿轮462下方,多功能马达460可以包括输出轴杆,该输出轴杆包括螺纹杆464。杆464可操作地接合带螺纹的从动块466,使得由马达460引起的杆464的旋转使从动块466上升或下降。
251、在一个实施例中,支架468可以远离从动块466横向延伸。在一个实施例中,如图20所示,支架468是通过紧固件附接到从动块466的支架。在另一实施例中,如图23和图24所示,支架468和从动块466包括单个整体部件。
252、呈可以由诸如铝的导电材料制成的导电帽470形式的可移动接地元件附接到安装杆472,例如,与帽470中的带螺纹孔接合的带螺纹的螺栓或螺钉,延伸穿过形成在支架468中的超大孔469,使得帽470能够相对于支架468竖直移动。弹簧474包围安装杆472并且被定位在支架468与导电帽470之间以使帽470偏置远离支架468。导电帽470延伸到形成在容器定位坡道486的水平中心部分492中的竖直通孔493中(参见图24)。可以提供在容器定位坡道486下方延伸的圆柱形导电帽引导件498以接纳和引导帽470。
253、在容器100被定位在容器接近开口408下方之前,挡板412处于第一位置,闭合接近容器接近开口408的通道。从动块466、支架468和导电帽470处于下降位置,使得导电帽470的顶部端部不突出到容器定位坡道486的水平中心部分492的顶部表面上方,因此以免干扰容器100相对于容器定位坡道486的移动。如图24所示,当容器100被定位在容器接近开口408下方和容器定位坡道486的水平中心部分492上或上方时,多功能马达460可以被激活以进行以下两者:将挡板412移动到未覆盖接近开口408的第二位置,并且用支架468和导电帽470使从动块466上升,直到帽接触或足够靠近容器100的器皿110的底部壁116,使得当导电物体接触流体表面602时,探针与接地平面之间的电容将可测量地(可检测地)增加。在一个实施例中,“足够靠近”是约1毫米或更小。导电帽470的顶部端部可以具有大致吻合器皿110的底部壁116的形状的凹陷或凹部。弹簧474允许导电帽470与支架468之间有某一竖直间隙,使得当导电帽470被提升到与器皿110接触时,过量的向上力不会施加到容器100。导电帽470提供与移液器的电容耦接以准许电容式液体液位感测。
254、参考图18、图20和图23,在一个实施例中,容器定位器进一步包括容器压紧臂478,该容器压紧臂可枢转地安装在附接到顶部支撑面板404的安装轭480内。压紧臂478的一个端部与顶部支撑面板404之间的弹簧482促使压紧臂478的相对端部抵靠止动元件484,以将压紧臂478定位在备用位置中,因此以免干扰容器100在压紧臂478下方的移动。
255、第二弹簧467被定位在从动块466与压紧臂478之间。如图23所示,当从动块466上升以将导电帽470提升到与容器100的器皿110的底部壁116接触时,从动块466也向上推动弹簧467,该弹簧又压靠压紧臂478的一个端部,由此将压紧臂478的相对端部向下枢转到与容器100的顶部接触。因此,如果容器100在容器定位坡道486的水平中心部分482的顶部表面上方定位在存储转盘418的固持站420的夹内,则枢转压紧臂478将使容器100向下推抵水平中心部分492,同时导电帽470通过从动块466和支架468上升到与器皿110的底部壁116接触,以确保容器100处于用于电容式液位感测的固定竖直基准位置。如上所提及,弹簧474允许导电帽470与支架468之间有某一竖直间隙,使得过量的向上力不会施加到容器100,并且还使得过量的向上力不会施加到压紧臂478。类似地,从动块466与压紧臂478之间的弹簧467确保过量的向下力不会施加到容器100。
256、除了将容器100定位成与容器定位坡道486恰当接触以确保容器100处于用于电容式液位感测的固定竖直基准位置之外,容器压紧臂478还可以通过防止当探针尖端由于探针尖端600与容器100的隔片126之间的摩擦而上升时探针尖端600提升容器100而执行压紧功能。
257、在容器100内的流体的电容式液位感测不在容器存储模块中执行的一个替代实施例中,容器存储模块可以仅包括挡板412和容器压紧臂478,两者都耦接到多功能马达460。在此类实施例中,容器压紧臂478仅执行上述压紧功能,以防止当探针尖端由于探针尖端600与容器100的隔片126之间的摩擦而上升时探针尖端600提升容器100。
258、在不需要覆盖容器上方的开口的又一实施例中,容器存储模块可以仅包括耦接到马达460的容器压紧臂478,该马达的唯一功能是控制容器压紧臂的移动。在此类实施例中,容器压紧臂478仅执行上述压紧功能,以防止当探针尖端由于探针尖端600与容器100的隔片126之间的摩擦而上升时探针尖端600提升容器100。
259、废物处理模块
260、在容器存储模块400中所固持的容器100为空或不再使用(例如,内容物已经过期或容器中剩余的内容物不足以进行进一步处理)之后,将需要将容器100从容器存储模块400移除并丢弃容器100。容器100可以通过以下方式从存储模块400移除:通过用分配器头部304的致动器臂308推动屏障410的推动器销411以将形成在屏障410中的切口413与开口406对准来打开用于进入/脱离开口406的可移动屏障410,然后将夹持器320延伸到存储模块400中以抓握容器100,如上所述,以及将该容器从容器存储运输件418移除。
261、提供废物处理模块550以在容器100从存储模块400移除之后对该容器进行处理。如图25所示,废物处理模块550包括设置在开口552上方的保持器架554,在该开口下方可以提供合适的废物受器(未示出)。保持器架554包括相对侧562、564和在它们之间延伸的顶部部分560。上部保持器杆556和下部保持器杆558从保持器架554的侧面562延伸。保持器杆556、558彼此竖直间隔开,并且水平延伸跨越保持器架554的宽度的大约一半(即,侧面562和564之间的距离的大约一半),由此在保持器杆556、558的末端端部与保持器架的相对侧564之间留有间隙。将废弃容器100引导到废物受器中的废物槽(未示出)的一部分形成保持器架554的与上部保持器杆556和下部保持器杆558相对的后壁。
262、为了在废物处理模块550中丢弃容器100,将分配器300的分配器头部304旋转到与保持器架554的开口侧(即,架554的缺少上部保持杆556和下部保持器杆558的侧面)对准的位置。然后通过在径向“r”方向上推进夹持器托架305来延伸夹持器320以将由其固持的容器100定位在笼554内并经过上部保持器杆556和下部保持器杆558。然后旋转分配器头部底架306(在所示出的实施例中逆时针)以将容器100放置在上部保持器杆556和下部保持器杆558后方,其中夹持器320延伸上部保持器杆556与下部保持器杆558之间的间隙。夹持器指状件322、334然后打开以释放容器100,使得该容器通过开口552落入废物受器中。保持器架554被构造成确保一旦容器100被释放,容器100不会侧向、前向或后向倾斜,而是通过开口552掉落,其中该容器由废物槽引导到废物受器中。在图25中,容器100被示出为在悬置在开口552上方的保持器架554内。这是出于说明的目的,以示出容器100在由夹持器320释放时如何定位在保持器架554内。设置在开口552上方但未由夹持器320固持的容器100将通过开口552掉落,并且将不保持悬置状态,如图25所示。在释放容器100之后,夹持器320可以从保持器杆556、558之间取出,然后移动到另一位置。
263、硬件和软件
264、本文所公开的主题的各方面可经由控制和计算硬件部件、软件(其可包含固件)、数据输入部件和数据输出部件来实施。硬件部件包括计算和控制模块(例如,系统控制器,诸如微处理器、嵌入式控制器、专用集成电路(asics)和计算机,该计算和控制模块被构造成通过以下方式来实现计算和/或控制步骤:接收一个或多个输入值;执行存储在非暂时性机器可读媒体(例如,软件)上的一个或多个算法,这些非暂时性机器可读媒体提供用于操控或以其它方式作用于或响应于输入值的指令;以及输出一个或多个输出值。这类输出可以显示或以其它方式指示给用户以向用户提供信息,例如关于仪器的状态或由此进行的过程的信息,或这类输出可以包括对其它过程和/或控制算法的输入。数据输入部件包括用于输入供控制和计算硬件部件使用的数据的元件。此类数据输入可以包括由以下各项产生的信号:传感器或扫描器,诸如位置传感器、速度传感器、加速度计、环境(例如,温度)传感器、马达编码器、条形码扫描器或rfid扫描器;以及手动输入元件,诸如键盘、基于触笔的输入装置、触摸屏、麦克风、转换器、人工操作的扫描器等。数据输入可进一步包含从存储器检索的数据。数据输出部件可以包括硬盘或其它存储媒体、监测器、打印机、指示灯或声音信号元件(例如,编钟、蜂鸣器、喇叭、铃等)。
265、实施例
266、实施例1.一种用于传送容器的系统,该容器包括形成在该容器的相对侧上的凹槽,其中该系统包括:
267、容器装载接口,该容器装载接口包括:
268、可移动支撑平台,该可移动支撑平台能够在可接近位置与不可接近位置之间移动;以及
269、容器装载运输件,该容器装载运输件被支撑在该可移动支撑平台上并包括多个容器凹穴,每个容器凹穴被构造成当该可移动支撑平台处于该可接近位置时接纳竖直插入该容器凹穴的容器,并且准许容器从该容器凹穴横向移除,其中该容器装载运输件被构造成当该可移动支撑平台处于该不可接近位置时相对于形成在该可移动支撑平台中的传送开口将该容器凹穴顺序地运输到容器传送位置;
270、容器存储模块,该容器存储模块包括:
271、外壳,该外壳具有形成在该外壳的侧面中的容器进入/脱离开口;
272、可移动屏障,该可移动屏障被构造成在阻挡该容器进入/脱离开口的第一位置与准许容器横向移动穿过该容器进入/脱离开口的第二位置之间移动;以及
273、容器存储运输件,该容器存储运输件被设置在该外壳内并包括多个容器固持站,每个容器固持站包括弹簧片,这些弹簧片被构造成弹性地接合该容器固持站中所固持的容器的该凹槽,以将该容器保持在该容器固持站中,并且向外偏转以准许该容器横向插入该容器固持站中或从其横向移除;以及
274、容器分配器,该容器分配器被构造成将容器从该容器装载接口传送到该容器存储模块,并且包括:
275、容器夹持器,该容器夹持器被构造成通过接合容器的该凹槽来抓握位于该容器传送位置的该容器装载运输件的该容器凹穴中的一个中所承载的该容器;
276、夹持器推进系统,该夹持器推进系统被构造成移动该容器夹持器以将该容器从其中固持有该容器的该容器装载运输件的该容器凹穴中横向移除;以及
277、分配器移动系统,该分配器移动系统被构造成将该容器夹持器和由其固持的该容器从该容器传送位置移动到该容器存储模块的该进入/脱离开口;
278、其中该夹持器推进系统被构造成移动该容器夹持器以将由其固持的该容器插入穿过该进入/脱离开口并进入该容器存储运输件的容器固持站,并且该夹持器被构造成通过将该容器的该凹槽脱离接合来在该容器固持站中释放该容器。
279、实施例2.根据实施例1所述的系统,其中该容器装载接口的该可移动支撑平台包括抽屉,该抽屉可在其中该可移动支撑平台缩回到仪器中的该不可接近位置与其中该可移动支撑平台从该仪器延伸的该可接近位置之间移动。
280、实施例3.根据实施例1或2所述的系统,其中该容器装载运输件包括装载转盘,该装载转盘被支撑在该可移动支撑平台上以围绕装载转盘轴线旋转,并且其中该容器凹穴围绕该装载转盘轴线周向布置。
281、实施例4.根据实施例3所述的系统,其中该装载接口进一步包括用于检测该装载转盘的原始旋转位置的原位传感器。
282、实施例5.根据实施例3或4所述的系统,其中每个容器凹穴包括保持夹,这些保持夹被构造成接合形成在该容器上的该凹槽,以将该容器可移除地保持在该容器凹穴内。
283、实施例6.根据实施例3至5中任一项所述的系统,其中该容器凹穴被设置在该装载转盘的外周边上,并且在该装载转盘的该外周边处开放,以准许容器在相对于该装载转盘轴线的横向方向上从该凹穴中取出。
284、实施例7.根据实施例6所述的系统,其中每个容器凹穴包括形成在该容器凹穴的开放周边端部的相对侧上的凸纹,以为夹持机构打开以将该容器凹穴内所固持的容器的该凹槽接合或脱离接合提供间隙。
285、实施例8.根据实施例1至7中任一项所述的系统,其中每个容器凹穴包括容器定位夹板,该容器定位夹板被构造成接合形成在定位在该容器凹穴内的容器中的凹口。
286、实施例9.根据实施例1至8中任一项所述的系统,其中该容器装载接口进一步包括扫描器,该扫描器被配置成扫描关于该容器装载运输件上所承载的每个容器的机器可读信息。
287、实施例10.根据实施例9所述的系统,其中该扫描器包括条形码扫描器。
288、实施例11.根据实施例3至7中任一项所述的系统,其中该容器装载接口进一步包括装载运输马达,该装载运输马达耦接到该装载转盘以实现该装载转盘围绕该装载转盘轴线的动力旋转。
289、实施例12.根据实施例11所述的系统,其中该装载运输马达通过传动带耦接到该装载转盘。
290、实施例13.根据实施例1至12中任一项所述的系统,其中该容器存储模块包括从该可移动屏障延伸的推动器销;并且该容器分配器包括被构造成接合该推动器销的门致动器臂,并且其中该门致动器臂能够由该分配器移动系统移动以将该容器存储模块的该可移动屏障从该第一位置移动到该第二位置。
291、实施例14.根据实施例1至13中任一项所述的系统,其中该容器存储运输件包括存储转盘,该存储转盘被支撑在该外壳内以围绕存储转盘轴线旋转,并且其中该容器固持站围绕该存储转盘轴线周向布置。
292、实施例15.根据实施例14所述的系统,其中该容器存储运输件进一步包括用于检测该存储转盘的原始旋转位置的原位传感器。
293、实施例16.根据实施例14或15所述的系统,其中该存储转盘包括包含多对相对的、面对的弹簧片的上部夹环和包含多对相对的、面对的弹簧片的下部夹环,其中该上部夹环的每对弹簧片与该下部夹环的对应的一对弹簧片对准,以限定每个固持站。
294、实施例17.根据实施例14至16中任一项所述的系统,其中每个弹簧片包括向内弯曲到对应固持站中的转向节,并且其中每个转向节安置到设置在该固持站中的该容器的该凹槽中的一个中。
295、实施例18.根据实施例16所述的系统,其中该上部夹环与该下部夹环间隔开,使得该上部夹环的每对弹簧片与该下部夹环的该对应的一对弹簧片间隔开。
296、实施例19.根据实施例14至18中任一项所述的系统,其中该容器存储模块进一步包括存储运输马达,该存储运输马达耦接到该存储转盘以实现该存储转盘围绕该存储转盘轴线的动力旋转。
297、实施例20.根据实施例19所述的系统,其中该存储运输马达通过安装到该转盘并与安装在该存储运输马达的输出轴杆上的正齿轮接合的正齿轮耦接到该存储转盘。
298、实施例21.根据实施例1至20中任一项所述的系统,其中该容器夹持器包括:
299、夹持器元件安装支架;
300、第一夹持器元件,该第一夹持器元件安装到该夹持器元件安装支架,以围绕第一夹持器旋转轴线进行枢转移动,并且包括第一挂钩,该第一挂钩位于相对于该第一夹持器旋转轴线径向间隔开的位置处并且被构造成安置在该容器的该凹槽中的一个中;以及
301、第二夹持器元件,该第二夹持器元件安装到该夹持器元件安装支架,以围绕平行于该第一夹持器旋转轴线的第二夹持器旋转轴线进行枢转移动,并且包括第二挂钩,该第二挂钩位于相对于该第二夹持器旋转轴线径向间隔开的位置处并且被构造成安置在该容器的相对凹槽中,
302、其中该第一挂钩和该第二挂钩朝向彼此弯曲,并且其中该第一夹持器元件和该第二夹持器元件彼此耦接,以围绕相应的第一夹持器旋转轴线和第二夹持器旋转轴线朝向彼此或远离彼此进行经协调的枢转移动,并且其中该容器夹持器构造成通过使该第一夹持器元件和该第二夹持器元件朝向彼此枢转直到相应的第一挂钩和第二挂钩被安置在容器的该凹槽中的一个内来抓握该容器。
303、实施例22.根据实施例21所述的系统,其中该第一夹持器元件和该第二夹持器元件通过以下各项彼此耦接以进行经协调的枢转移动:
304、第一夹持器元件耦接齿轮,该第一夹持器元件耦接齿轮附接到该第一夹持器元件并且与该第一夹持器旋转轴线同轴布置;以及
305、第二夹持器元件耦接齿轮,该第二夹持器元件耦接齿轮附接到该第二夹持器元件并且与该第二夹持器旋转轴线同轴布置;
306、其中该第一夹持器元件耦接齿轮和该第二夹持器元件耦接齿轮相互接合,使得该第一夹持器元件或该第二夹持器元件的旋转引起另一个夹持器元件在相反的旋转方向上的对应的经协调的旋转。
307、实施例23.根据实施例22所述的系统,其中该容器夹持器进一步包括:
308、夹持器马达,该夹持器马达具有夹持器致动器齿轮;
309、夹持器驱动齿轮,该夹持器驱动齿轮与该第一夹持器旋转轴线同轴安装并且被构造成独立于该第一夹持器元件旋转,其中该夹持器致动器齿轮与该夹持器驱动齿轮接合;以及
310、驱动销,该驱动销在与该第一夹持器旋转轴线间隔开的位置处从该第一夹持器元件延伸,其中该驱动销延伸到形成在该夹持器驱动齿轮中的开口中。
311、实施例24.根据实施例23所述的系统,其中该容器夹持器进一步包括连接到该第一夹持器元件和该第二夹持器元件中的至少一个的弹簧,并且其中形成在该夹持器驱动齿轮中的该开口包括弓形狭槽。
312、实施例25.根据实施例1至24中任一项所述的系统,其中该夹持器推进系统包括:
313、线性轨道;
314、线性轴承,该线性轴承耦接到该线性轨道,其中该容器夹持器被支撑在该线性轴承上;
315、夹持器推进马达;以及
316、传动带,该传动带耦接到该夹持器推进马达并且固定到该线性轴承。
317、实施例26.根据实施例1至25中任一项所述的系统,其中该分配器移动系统包括:
318、分配器头部框架,该分配器头部框架被安装以便能够围绕分配器旋转轴线旋转,其中该容器夹持器被支撑在该分配器头部框架上;
319、固定太阳齿轮,该固定太阳齿轮与该分配器轴线同轴布置;以及
320、分配器马达,该分配器马达固定到该分配器头部框架并且包括可操作地接合该固定太阳齿轮的驱动亲爱。
321、实施例27.根据实施例1至24中任一项所述的系统,其中:
322、该分配器移动系统包括:
323、分配器头部框架,该分配器头部框架被安装以便能够围绕分配器旋转轴线旋转;
324、固定太阳齿轮,该固定太阳齿轮与该分配器轴线同轴布置;以及
325、分配器马达,该分配器马达固定到该分配器头部框架并且包括可操作地接合该固定太阳齿轮的驱动齿轮;并且
326、该夹持器推进系统包括:
327、线性轨道,该线性轨道被支撑在该分配器头部框架上并且相对于该分配器轴线径向定向;
328、线性轴承,该线性轴承耦接到该线性轨道,其中该容器夹持器被支撑在该线性轴承上;
329、夹持器推进马达,该夹持器推进马达被安装到该分配器头部框架;以及
330、传动带,该传动带可操作地耦接到该夹持器推进马达并且附接到该线性轴承。
331、实施例28.根据实施例1至27中任一项所述的系统,其中该容器存储模块进一步包括至少一个热控制部件,以维持该外壳内的期望温度,其中该至少一个热部件包括以下各项中的一者或多者:
332、热电模块;
333、散热器;以及
334、风扇。
335、实施例29.一种用于传送容器的方法,该容器包括形成在该容器的相对侧上的凹槽,其中该方法包括:
336、将可移动支撑平台从不可接近位置移动到可接近位置,以向用户提供对支撑在该可移动支撑平台上并包括多个容器凹穴的容器装载运输件的接近;
337、将容器竖直插入该容器凹穴中的一个或多个容器凹穴中的每一个中;
338、将该可移动支撑平台从该可接近位置移动到该不可接近位置;
339、在形成在该可移动支撑平台中的传送开口处用该容器装载运输件将该容器凹穴顺序地运输到容器传送位置;
340、通过将容器的该凹槽与容器夹持器接合来抓握位于该容器传送位置的该容器装载运输件的该容器凹穴中的一个中所承载的该容器;
341、用夹持器推进系统移动该容器夹持器以将该容器从其中固持有该容器的该容器装载运输件的该容器凹穴中横向移除;
342、用分配器移动系统将该容器夹持器和由其固持的该容器从该容器传送位置移动到容器存储模块的外壳的进入/脱离开口;
343、将从该容器存储模块的可移动屏障延伸的推动器销与致动器臂接合,并且用该分配器移动系统移动该致动器臂,以将该容器存储模块的该可移动屏障从阻挡该容器进入/脱离开口的第一位置移动到准许容器横向移动通过该容器进入/脱离开口的第二位置;
344、用该夹持器推进系统移动该容器夹持器,以将由该夹持器固持的该容器插入通过该进入/脱离开口并进入设置在该外壳内的容器存储运输件的多个容器固持站中的一个中,其中每个容器固持站包括弹簧片,这些弹簧片被构造成弹性地接合该容器固持站中所固持的容器的凹槽,以将该容器保持在该容器固持站中,并且向外偏转以准许该容器横向插入该容器固持站中或从其横向移除;以及
345、通过将该夹持器与该容器的该凹槽脱离接合来在该容器固持站中释放该容器。
346、实施例30.根据实施例29所述的方法,其中移动可移动支撑平台包括移动抽屉,该抽屉能够在其中该可移动支撑平台缩回到仪器中的该不可接近位置与其中该可移动支撑平台从该仪器延伸的该可接近位置之间移动。
347、实施例31.根据实施例29或30所述的方法,其中该容器装载运输件包括装载转盘,该装载转盘被支撑在该可移动支撑平台上以围绕装载转盘轴线旋转,并且其中该容器凹穴围绕该装载转盘轴线周向布置并在其上部端部处开放,并且其中顺序地运输该容器凹穴包括围绕该转盘轴线旋转该转盘。
348、实施例32.根据实施例31所述的方法,其中该容器凹穴被设置在该装载转盘的外周边上并且在该装载转盘的该外周边处开放,并且其中
349、抓握该容器凹穴中的一个中所承载的该容器包括:
350、将该容器夹持器插入穿过开放外周边以接合该容器的该凹槽;并且
351、从该容器凹穴中横向移除该容器包括用该容器夹持器移动该容器穿过该开放外周边。
352、实施例33.根据实施例29至32中任一项所述的方法,该方法进一步包括用扫描器扫描关于该容器装载运输件上所承载的每个容器的机器可读信息。
353、实施例34.根据实施例33所述的方法,其中该扫描器包括条形码扫描器。
354、实施例35.根据实施例29至34中任一项所述的方法,该方法进一步包括用原位传感器监测该容器装载运输件的凹穴中所固持的每个容器的位置,该原位传感器用于检测该容器装载运输件的原始位置。
355、实施例36.根据实施例29至35中任一项所述的方法,该方法进一步包括以下自动步骤:
356、用该容器存储运输件将该容器移动到该外壳内的液位感测方位;
357、相对于该容器移动可移动接地元件,直到该接地元件非常接近于或接触该容器的一部分;
358、将导电探针或可移除地附接到该探针的导电尖端下降穿过该外壳中的容器接近开口并进入该容器中;
359、当该探针或导电尖端接触该容器内的流体的表面时检测信号或信号变化,其中该信号或该信号变化是基于该探针或导电尖端与非常接近于或接触该容器的一部分的该可移动接地元件之间的电容;以及
360、记录检测到该信号或该信号变化的竖直探针位置。
361、实施例37.根据实施例36所述的方法,该方法进一步包括以下自动步骤:
362、在该液位感测方位处将该容器与容器定位器接触,以迫使该容器进入可重复的竖直液位感测位置。
363、实施例38.根据实施例37所述的方法,其中步骤f)包括以下自动步骤:
364、将与该容器存储运输件邻近定位的容器定位坡道与定位在该液位感测方位处的该容器的下部部分接触;以及
365、接触定位在该液位感测方位处的该容器的顶部部分并向下推动该容器,使得该容器的底部部分维持与该容器定位坡道接触。
366、实施例39.根据实施例38所述的方法,其中步骤b)和h)同时执行。
367、实施例40.根据实施例36至39中任一项所述的方法,该方法进一步包括以下步骤:
368、在步骤b)期间,将附接到该外壳的挡板从覆盖该容器接近开口的第一位置自动移动到暴露该容器接近开口的第二位置。
369、实施例41.一种用于抓握和传送容器的机构,其中该容器包括形成在该容器的相对侧上的平行、竖直定向的凹槽,并且其中该机构包括:
370、底架,该底架被构造成围绕竖直定向的底架旋转轴线旋转;以及
371、夹持器托架,该夹持器托架被支撑在该底架上以与该底架一起旋转,并且被构造成相对于该底架旋转轴线在径向方向上移动;其中该夹持器托架包括容器夹持器,该容器夹持器包括:
372、第一夹持器元件,该第一夹持器元件安装到该夹持器托架,以围绕平行于该底架旋转轴线的第一夹持器旋转轴线进行枢转移动,并且包括第一挂钩,该第一挂钩位于相对于该第一夹持器旋转轴线径向间隔开的位置处;以及
373、第二夹持器元件,该第二夹持器元件安装到该夹持器托架,以围绕平行于该第一夹持器旋转轴线的第二夹持器旋转轴线进行枢转移动,并且包括第二挂钩,该第二挂钩位于相对于该第二夹持器旋转轴线径向间隔开的位置处;其中该第一挂钩和该第二挂钩朝向彼此弯曲,并且其中该第一夹持器元件和该第二夹持器元件彼此耦接,以围绕相应的第一夹持器旋转轴线和第二夹持器旋转轴线朝向彼此或远离彼此进行经协调的枢转移动,并且其中该容器夹持器被构造成通过使该第一夹持器元件和该第二夹持器元件朝向彼此枢转直到相应的第一挂钩和第二挂钩各自接合容器的该竖直定向的凹槽中的一个来抓握该容器。
374、实施例42.根据实施例41所述的机构,其中该第一夹持器元件和该第二夹持器元件通过以下各项彼此耦接以进行经协调的枢转移动:
375、第一夹持器元件耦接齿轮,该第一夹持器元件耦接齿轮附接到该第一夹持器元件并且与该第一夹持器旋转轴线同轴布置;以及
376、第二夹持器元件耦接齿轮,该第二夹持器元件耦接齿轮附接到该第二夹持器元件并且与该第二夹持器旋转轴线同轴布置;
377、其中该第一夹持器元件耦接齿轮和该第二夹持器元件耦接齿轮相互接合,使得该第一夹持器元件或该第二夹持器元件的旋转引起另一个夹持器元件在相反的旋转方向上的对应的经协调的旋转。
378、实施例43.根据实施例42所述的机构,该机构进一步包括:
379、夹持器马达,该夹持器马达具有夹持器致动器齿轮;
380、夹持器驱动齿轮,该夹持器驱动齿轮与该第一夹持器旋转轴线同轴安装并且被构造成独立于该第一夹持器元件旋转,其中该夹持器致动器齿轮与该夹持器驱动齿轮接合;以及
381、驱动销,该驱动销在与该第一夹持器旋转轴线间隔开的位置处从该第一夹持器元件延伸,其中该驱动销延伸到形成在该夹持器驱动齿轮中的开口中。
382、实施例44.根据实施例43所述的机构,该机构进一步包括连接到该第一夹持器元件和该第二夹持器元件中的至少一个的弹簧,并且其中形成在该夹持器驱动齿轮中的该开口包括弓形狭槽。
383、实施例45.根据实施例41至44中任一项所述的机构,该机构进一步包括:
384、线性轨道;
385、线性轴承,该线性轴承耦接到该线性轨道,其中该夹持器托架被支撑在该线性轴承上;
386、夹持器推进马达;以及
387、传动带,该传动带耦接到该夹持器推进马达并且附接到该线性轴承,使得由该夹持器推进马达引起的该传动带的移动在该径向方向上移动该夹持器托架。
388、实施例46.根据实施例41至45中任一项所述的机构,该机构进一步包括:
389、固定太阳齿轮,该固定太阳齿轮与该底架旋转轴线同轴布置;以及
390、马达,该马达固定到该底架并且包括驱动亲爱,该驱动亲爱可操作地接合该固定太阳齿轮,使得由该马达引起的该驱动齿轮的旋转致使该底架围绕该底架旋转轴线的旋转。
391、实施例47.一种用于对支撑在可移动载体上的流体容器内的流体执行电容式液位感测的机构,其中该机构包括:
392、导电探针,该导电探针被构造成当该探针或可移除地附接到该探针的导电尖端接触该容器内的该流体的表面时通过检测信号或信号变化来进行电容式液位感测,其中该信号或信号变化是基于该探针或导电尖端与邻近或接触该容器的接地的导电结构之间的电容;
393、探针位置传感器,该探针位置传感器用于监测该探针的竖直位置并记录检测到该信号或可检测信号变化的该竖直探针位置;以及
394、可移动接地元件,该可移动接地元件被构造成相对于由该可移动载体定位在相对于该探针的液位感测方位处的容器进行选择性移动,直到该接地元件非常接近于或接触该容器的一部分。
395、实施例48.根据实施例47所述的机构,其中该可移动接地元件的一部分被成形为与该容器的该部分吻合。
396、实施例49.根据实施例47或48所述的机构,该机构进一步包括:
397、马达;
398、螺纹杆,该螺纹杆可操作地耦接到该马达;以及
399、支架,该支架可操作地耦接到该螺纹杆,其中该可移动接地元件附接到该支架。
400、实施例50.根据实施例49所述的机构,其中该可移动载体包含在具有该载体上方的顶部壁的外壳内,并且其中容器接近开口穿过该顶部壁形成在该液位感测方位上方,并且被构造成准许该探针或可移除地附接到该探针的导电尖端进入位于该液位感测方位处的容器,并且其中该机构进一步包括挡板,该挡板附接到该顶部壁并且可在覆盖该容器接近开口的第一位置与暴露该容器接近开口的第二位置之间移动,并且其中该挡板可操作地耦接到该马达,以当该马达将该可移动接地元件移动到与该容器的该部分非常接近或接触时实现该挡板从该第一位置到该第二位置的动力移动。
401、实施例51.根据实施例50所述的机构,其中该挡板包括扇形齿轮,该扇形齿轮可枢转地安装到该顶部壁并且包括沿着其弓形边缘的齿轮齿,这些齿轮齿接合由该马达驱动的齿轮。
402、实施例52.根据实施例47至51中任一项所述的机构,该机构进一步包括容器定位器,该容器定位器被构造成接触定位在该液位感测方位处的该容器,并且迫使该容器进入可重复的竖直液位感测位置。
403、实施例53.根据实施例52所述的机构,其中该容器定位器包括:
404、容器定位坡道,该容器定位坡道被构造成与定位在该液位感测方位处的该容器的底部部分接触;以及
405、容器压紧臂,该容器压紧臂被构造成接触定位在该液位感测方位处的该容器的顶部部分并向下推动该容器,使得该容器的底部部分维持与该容器定位坡道接触。
406、实施例54.根据实施例53所述的机构,其中该可移动载体包括转盘,该转盘能够围绕竖直定向的转盘旋转轴线旋转,并且包括设置在围绕该转盘旋转轴线成角度间隔开的位置处的多个容器固持站,其中每个容器固持站包括弹簧片,这些弹簧片相对于该转盘旋转轴线横向延伸并且被构造成弹性地接合该容器固持站中所固持的容器的凹槽以将该容器保持在该容器固持站中,并且其中该容器能够在该容器固持站的这些弹簧片之间在竖直方向上滑动;并且其中
407、该容器定位坡道被设置在该转盘的一部分下方,并且被构造成当该转盘将该容器移动到该液位感测方位中时与容器固持站中所固持的该容器的该底部部分接触,
408、该容器与该容器定位坡道之间的接触使该容器在该容器固持站内滑动到该容器的该底部接触该容器定位坡道的位置,并且
409、该容器压紧臂被构造成接触该容器的该顶部部分以使该容器在该容器固持站内向下滑动,使得该容器的该底部部分维持与该容器定位坡道接触。
410、实施例55.根据实施例53或54所述的机构,其中该容器压紧臂耦接到该可移动接地元件,使得当该可移动接地元件移动到非常接近于或接触该容器的该部分时,该容器压紧臂移动到与该容器的该顶部部分接触,以向下推动该容器,使得该容器的该底部部分维持与该容器定位坡道接触。
411、实施例56.根据实施例53至55中任一项所述的机构,其中该容器定位坡道包括倾斜的第一端部、水平中心部分和倾斜的第二端部,并且其中当该容器被定位在该液位感测方位处时,该容器被定位在该水平中心部分上。
412、实施例57.根据实施例53至56中任一项所述的机构,其中该容器定位坡道被成形为吻合由该可移动载体移动穿过该液位感测方位的容器横穿的路径的一部分。
413、实施例58.根据实施例56或57所述的机构,该机构进一步包括第一辊,该第一辊在该倾斜的第一端部的开始处,以将容器的底部部分引导到该倾斜的第一端部上。
414、实施例59.根据实施例58所述的机构,该机构进一步包括第二辊,该第二辊在该倾斜的第二端部的开始处,以将容器的底部部分引导到该倾斜的第二端部上。
415、实施例60.根据实施例47或48所述的机构,其中该可移动载体包含在具有该载体上方的顶部壁的外壳内,并且其中容器接近开口穿过该顶部壁形成在该液位感测方位上方,并且被构造成准许该探针或可移除地附接到该探针的导电尖端穿过该容器接近开口进入位于该液位感测方位处的容器,并且其中该机构进一步包括:
416、马达;
417、螺纹杆,该螺纹杆可操作地耦接到该马达;
418、从动块,该从动块以螺纹方式耦接到螺纹杆;
419、支架,该支架从该从动块延伸,其中该可移动接地元件附接到该支架,使得由该马达引起的该螺纹杆在第一方向上的旋转致使该接地元件移动到与该容器的该部分非常接近或接触,并且由该马达引起的该螺纹杆在第二方向上的旋转致使该接地元件移动从与该容器的该部分非常接近或接触远离;
420、挡板,该挡板附接到该顶部壁并且可在覆盖该容器接近开口的第一位置与暴露该容器接近开口的第二位置之间移动,其中该挡板可操作地耦接到该马达,以当该马达将该可移动接地元件移动到与该容器的该部分非常接近或接触时实现该挡板从该第一位置到该第二位置的动力移动,并且当该马达将该可移动接地元件移动从与该容器的该部分非常接近或接触远离时实现该挡板从该第二位置到该第一位置的动力移动;
421、容器定位坡道,该容器定位坡道被构造成与定位在该液位感测方位处的该容器的底部部分接触;以及
422、容器压紧臂,该容器压紧臂被构造成在不接触定位在该液位感测方位处的容器的第一位置与接触定位在该液位感测方位处的该容器的顶部部分的第二位置之间移动,以向下推动该容器,使得该容器的该底部部分维持与该容器定位坡道接触,其中该从动块接触该容器压紧臂,以当该马达将该可移动接地元件移动到与该容器的该部分非常接近或接触并且将该挡板从其第一位置移动到其第二位置时将该容器压紧臂从其第一位置移动到其第二位置。
423、实施例61.根据实施例60所述的机构,其中该挡板包括扇形齿轮,该扇形齿轮可枢转地安装到该顶部壁并且包括沿着其弓形边缘的齿轮齿,这些齿轮齿接合与该螺纹杆同轴的由该马达驱动的齿轮。
424、实施例62.根据实施例60或61所述的机构,其中该容器压紧臂被构造成在其第一位置与其第二位置之间进行枢转移动,并且其中该机构进一步包括弹簧,该弹簧耦接到该容器压紧臂以将该容器压紧臂偏置在其第一位置中。
425、实施例63.一种用于对支撑在可移动载体上的容器内的流体执行电容式液位感测的方法,其中该方法包括以下自动步骤:
426、用该可移动载体将该容器移动到液位感测方位;
427、相对于该容器移动可移动接地元件,直到该接地元件非常接近于或接触该容器的一部分;
428、将导电探针或可移除地附接到该探针的导电尖端下降到该容器中;
429、当该探针或导电尖端接触该容器内的流体的表面时检测信号或信号变化,其中该信号或该信号变化是基于该探针或导电尖端与非常接近于或接触该容器的一部分的该可移动接地元件之间的电容;以及
430、记录检测到该信号或该信号变化的竖直探针位置。
431、实施例64.根据实施例63所述的方法,该方法进一步包括以下自动步骤:
432、在该液位感测方位处将该容器与容器定位器接触,以迫使该容器进入可重复的竖直液位感测位置。
433、实施例65.根据实施例64所述的方法,其中步骤f)包括以下自动步骤:
434、将与该可移动载体邻近定位的容器定位坡道与定位在该液位感测方位处的该容器的底部部分接触;以及
435、接触定位在该液位感测方位处的该容器的顶部部分并向下推动该容器,使得该容器的底部部分维持与该容器定位坡道接触。
436、实施例66.根据实施例65所述的方法,其中步骤b)和h)同时执行。
437、实施例67.根据实施例65或66所述的方法,其中该容器定位坡道包括倾斜的第一端部、水平中心部分和倾斜的第二端部,并且其中当该容器被定位在该液位感测方位处时,该容器被定位在该水平中心部分上。
438、实施例68.根据实施例67所述的方法,该方法进一步包括:第一辊,该第一辊在该倾斜的第一端部的开始处,以将容器的底部部分引导到该倾斜的第一端部上。
439、实施例69.根据实施例68所述的方法,该方法进一步包括:第二辊,该第二辊在该倾斜的第二端部的开始处,以将容器的底部部分引导到该倾斜的第二端部上。
440、实施例70.根据实施例65至69中任一项所述的方法,其中该可移动载体包括转盘,该转盘能够围绕竖直定向的转盘旋转轴线旋转,并且包括设置在围绕该转盘旋转轴线成角度间隔开的位置处的多个容器固持站,其中每个容器固持站包括弹簧片,这些弹簧片相对于该转盘旋转轴线横向延伸并且被构造成弹性地接合该容器固持站中所固持的容器的凹槽以将该容器保持在该容器固持站中,并且其中该容器能够在该容器固持站的这些弹簧片之间在竖直方向上滑动;并且其中
441、使该容器的该底部部分与该容器定位坡道接触使该容器在该容器固持站内滑动到该可重复的竖直液位感测位置,并且
442、该容器的该顶部部分与该容器压紧臂的接触使该容器在该容器固持站内向下滑动,使得该容器的该底部部分维持与该容器定位坡道接触。
443、实施例71.根据实施例63至70中任一项所述的方法,其中该载体包含在具有该载体上方的顶部壁的外壳内,并且其中容器接近开口穿过该顶部壁形成在该液位感测方位上方,并且被构造成准许该探针或可移除地附接到该探针的导电尖端进入位于该液位感测方位处的容器,其中该方法进一步包括执行以下步骤:
444、在步骤b)期间,将附接到该顶部壁的挡板从覆盖该容器接近开口的第一位置自动移动到暴露该容器接近开口的第二位置。
445、实施例72.根据实施例63至71中任一项所述的方法,其中该可移动接地元件的一部分被成形为与该容器的该部分吻合。
446、实施例73.根据实施例65至72中任一项所述的方法,其中该容器定位坡道被成形为吻合由该可移动载体移动穿过该液位感测方位的容器横穿的路径的一部分。
447、实施例74.一种用于提供对基本上封闭的外壳内的多个容器中的一个的选择性接近的机构,其中该机构包括:
448、可移动载体,该可移动载体在该外壳内并且被构造成固持和承载该多个容器;
449、容器接近开口,该容器接近开口形成在该外壳的顶部壁中在由该可移动载体上所承载的该多个容器所横穿的路径上的位置处,使得该载体的移动将该多个容器中的每一个顺序地放置在该容器接近开口下方;以及
450、挡板,该挡板可枢转地附接到该外壳的该顶部壁并且可在第一位置与第二位置之间枢转,该第一位置覆盖该容器接近开口,以由此防止穿过该容器接近开口接近位于该容器接近开口下方的该容器,该第二位置暴露该容器接近开口,以由此允许穿过该容器接近开口接近位于该容器接近开口下方的该容器。
451、实施例75.根据实施例74所述的机构,该机构进一步包括马达,该马达可操作地耦接到该挡板以实现该挡板从该第一位置到该第二位置的动力移动。
452、实施例76.根据实施例75所述的机构,其中该挡板包括扇形齿轮,该扇形齿轮被安装以在该第一位置与该第二位置之间进行枢转移动,并且包括沿着其弓形边缘的齿轮齿,这些齿轮齿接合由该马达驱动的齿轮。
453、实施例77.根据实施例76所述的机构,该机构进一步包括容器压紧臂,该容器压紧臂被构造成在不接触定位在该容器接近开口下方的容器的第一位置与接触定位在该容器接近开口下方的该容器的顶部部分的第二位置之间移动,以将该容器固持在固定竖直位置中,其中该马达耦接到该容器压紧臂,以当该马达将该挡板从其第一位置移动到其第二位置时将该容器压紧臂从其第一位置移动到其第二位置。
454、实施例78.根据实施例77所述的机构,该机构进一步包括:
455、螺纹杆,该螺纹杆可操作地耦接到该马达,其中由该马达驱动的该齿轮与该螺纹杆同轴布置;以及
456、从动块,该从动块以螺纹方式耦接到该螺纹杆,其中该容器压紧臂被构造成在其第一位置与其第二位置之间进行枢转移动,并且其中该容器压紧臂接触该从动块,使得当由该马达驱动的该齿轮旋转该扇形齿轮以将该挡板从其第一位置移动到其第二位置时,该螺纹杆移动该从动块以将该容器压紧臂从其第一位置移动到其第二位置。
457、实施例79.根据实施例78所述的机构,该机构进一步包括弹簧,该弹簧耦接到该容器压紧臂以将该容器压紧臂偏置在其第一位置中。
458、实施例80.一种用于提供对基本上封闭的外壳内的多个容器中的一个的选择性接近的方法,其中该方法包括以下自动步骤:
459、a)在可移动载体上承载该外壳内的该多个容器;
460、b)将该可移动载体上所承载的该多个容器中的每一个顺序地放置在形成在该外壳的顶部壁中的容器接近开口下方;以及
461、c)将可枢转地附接到该外壳的该顶部壁的挡板从覆盖该容器接近开口的第一位置自动枢转到暴露该容器接近开口的第二位置。
462、实施例81.根据实施例80所述的方法,该方法进一步包括以下步骤:
463、d)在步骤c)期间,自动接触定位在该容器接近开口下方的该容器的顶部部分,以将该容器固持在固定竖直位置处。
464、实施例82.根据实施例81所述的方法,其中步骤d)包括使定位在该容器接近开口下方的该容器的该顶部部分与容器压紧臂接触。
465、实施例83.一种用于处理用过的容器的系统,该系统包括设置在废物开口上方的保持器架,其中该保持器架包括:
466、相对的、竖直定向的第一侧和第二侧;
467、上部保持器杆和下部保持器杆,该上部保持器杆和该下部保持器杆从该保持器架的该第一侧朝向该第二侧横向延伸,其中该上部保持器杆和该下部保持器杆彼此竖直间隔开并且延伸跨过该保持器架的宽度的一部分,以便在该第二侧与该保持器杆的末端端部之间留有间隙,并且其中该上部保持器杆和该下部保持器杆与该第二侧之间的该间隙被构造成准许容器插入穿过该间隙;以及
468、容器夹持器,该容器夹持器被构造成固持该容器,穿过该间隙将该容器插入到该第一侧与该第二侧之间的位置,并且移动到该夹持器定位在竖直间隔开的上部保持器杆与下部保持器杆之间且该容器位于该上部保持器杆和该下部保持器杆后方的位置。
469、实施例84.根据实施例83所述的系统,其中该容器包括形成在该容器的相对侧上的凹槽,并且其中该容器夹持器包括:
470、夹持器元件安装支架;
471、第一夹持器元件,该第一夹持器元件安装到该夹持器元件安装支架,以围绕第一夹持器旋转轴线进行枢转移动,并且包括第一挂钩,该第一挂钩位于相对于该第一夹持器旋转轴线径向间隔开的位置处并且被构造成安置在该容器的该凹槽中的第一者中;以及
472、第二夹持器元件,该第二夹持器元件安装到该夹持器元件安装支架,以围绕平行于该第一夹持器旋转轴线的第二夹持器旋转轴线进行枢转移动,并且包括第二挂钩,该第二挂钩位于相对于该第二夹持器旋转轴线径向间隔开的位置处并且被构造成安置在该凹槽中的第二者中,该凹槽中的该第二者与该容器的该凹槽中的该第一者相对,
473、其中该第一挂钩和该第二挂钩朝向彼此弯曲,并且其中该第一夹持器元件和该第二夹持器元件彼此耦接,以围绕相应的第一夹持器旋转轴线和第二夹持器旋转轴线朝向彼此或远离彼此进行经协调的枢转移动,其中该容器夹持器构造成通过使该第一夹持器元件和该第二夹持器元件朝向彼此枢转直到相应的第一挂钩和第二挂钩被安置在容器的该凹槽中的一个内来抓握该容器,并且其中该第一夹持器元件和该第二夹持器元件当抓握该容器时装配在竖直间隔开的上部保持器杆与下部保持器杆之间。
474、实施例85.根据实施例84所述的系统,其中该第一夹持器元件和该第二夹持器元件通过以下各项彼此耦接以进行经协调的枢转移动:
475、第一夹持器元件耦接齿轮,该第一夹持器元件耦接齿轮附接到该第一夹持器元件并且与该第一夹持器旋转轴线同轴布置;以及
476、第二夹持器元件耦接齿轮,该第二夹持器元件耦接齿轮附接到该第二夹持器元件并且与该第二夹持器旋转轴线同轴布置;
477、其中该第一夹持器元件耦接齿轮和该第二夹持器元件耦接齿轮相互接合,使得该第一夹持器元件或该第二夹持器元件的旋转引起另一个夹持器元件在相反的旋转方向上的对应的经协调的旋转。
478、实施例86.根据实施例84所述的系统,其中该容器夹持器进一步包括:
479、夹持器马达,该夹持器马达具有夹持器致动器齿轮;
480、夹持器驱动齿轮,该夹持器驱动齿轮与该第一夹持器旋转轴线同轴安装并且被构造成独立于该第一夹持器元件旋转,其中该夹持器致动器齿轮与该夹持器驱动齿轮接合;以及
481、驱动销,该驱动销在与该第一夹持器旋转轴线间隔开的位置处从该第一夹持器元件延伸,其中该驱动销延伸到形成在该夹持器驱动齿轮中的开口中。
482、实施例87.根据实施例86所述的系统,其中该容器夹持器进一步包括连接到该第一夹持器元件和该第二夹持器元件中的至少一个的弹簧,并且其中形成在该夹持器驱动齿轮中的该开口包括弓形狭槽。
483、实施例88.根据实施例83至87中任一项所述的系统,该系统进一步包括夹持器推进系统,该夹持器推进系统包括:
484、线性轨道;
485、线性轴承,该线性轴承耦接到该线性轨道,其中该容器夹持器被支撑在该线性轴承上;
486、夹持器推进马达;以及
487、传动带,该传动带耦接到该夹持器推进马达并且固定到该线性轴承。
488、实施例89.根据实施例84所述的系统,其中该夹持器进一步包括底架,该底架被构造成围绕竖直定向的底架旋转轴线旋转,其中该夹持器安装支架被支撑在该底架上以与该底架一起旋转,该第一夹持器旋转轴线平行于该底架旋转轴线,并且该第二夹持器旋转轴线平行于该底架旋转轴线。
489、实施例90.一种用于处理用过的容器的方法,其中该方法包括:
490、用固持用过的容器的容器夹持器将该用过的容器水平移动到设置在废物开口上方的保持器架中,该保持器架包括相对的、竖直定向的第一侧和第二侧以及从该保持器架的该第一侧朝向该第二侧横向延伸的上部保持器杆和下部保持器杆,其中该上部保持器杆和该下部保持器杆彼此竖直间隔开并且延伸跨过该保持器架的宽度的一部分,以便在该上保持器杆和该下部保持器杆的末端端部与该第二侧之间留有间隙,该容器夹持器穿过该间隙将该用过的容器水平移动到该保持器架中;
491、在该保持器架内水平移动该容器夹持器和由其固持的该用过的容器,直到该容器夹持器延伸穿过竖直间隔开的上部保持器杆与下部保持器杆之间的间隙并且该用过的容器被设置在该上部保持器杆和该下部保持器杆后方;以及
492、从该容器夹持器释放该用过的容器,使得该用过的容器穿过其上方设置有该保持器架的该废物开口掉落。
493、实施例91.根据实施例90所述的方法,该方法进一步包括:从该竖直间隔开的上部保持器杆与下部保持器杆之间的该间隙水平移动该容器夹持器的步骤。
494、实施例92.根据实施例90或91所述的方法,其中该容器包括形成在该容器的相对侧上的凹槽,并且其中该容器夹持器包括:
495、夹持器元件安装支架;
496、第一夹持器元件,该第一夹持器元件安装到该夹持器元件安装支架,以围绕第一夹持器旋转轴线进行枢转移动,并且包括第一挂钩,该第一挂钩位于相对于该第一夹持器旋转轴线径向间隔开的位置处并且被构造成安置在该容器的该凹槽中的一个中;以及
497、第二夹持器元件,该第二夹持器元件安装到该夹持器元件安装支架,以围绕平行于该第一夹持器旋转轴线的第二夹持器旋转轴线进行枢转移动,并且包括第二挂钩,该第二挂钩位于相对于该第二夹持器旋转轴线径向间隔开的位置处并且被构造成安置在该容器的相对凹槽中,
498、其中该第一挂钩和该第二挂钩朝向彼此弯曲,并且其中该第一夹持器元件和该第二夹持器元件彼此耦接,以围绕相应的第一夹持器旋转轴线和第二夹持器旋转轴线朝向彼此或远离彼此进行经协调的枢转移动,其中该容器夹持器构造成通过使该第一夹持器元件和该第二夹持器元件朝向彼此枢转直到相应的第一挂钩和第二挂钩中的每一个被安置在容器的该凹槽中的一个内来抓握该容器,并且其中该第一夹持器元件和该第二夹持器元件中的每一个当抓握该容器时装配在竖直间隔开的上部保持器杆与下部保持器杆之间。
499、实施例93.根据实施例92所述的方法,其中该第一夹持器元件和该第二夹持器元件通过以下各项彼此耦接以进行经协调的枢转移动:
500、第一夹持器元件耦接齿轮,该第一夹持器元件耦接齿轮附接到该第一夹持器元件并且与该第一夹持器旋转轴线同轴布置;以及
501、第二夹持器元件耦接齿轮,该第二夹持器元件耦接齿轮附接到该第二夹持器元件并且与该第二夹持器旋转轴线同轴布置;
502、其中该第一夹持器元件耦接齿轮和该第二夹持器元件耦接齿轮相互接合,使得该第一夹持器元件或该第二夹持器元件的旋转引起另一个夹持器元件在相反的旋转方向上的对应的经协调的旋转。
503、实施例94.根据实施例93所述的方法,其中该容器夹持器由以下各项致动以固持该用过的容器或释放该用过的容器:
504、夹持器马达,该夹持器马达具有夹持器致动器齿轮;
505、夹持器驱动齿轮,该夹持器驱动齿轮与该第一夹持器旋转轴线同轴安装并且被构造成独立于该第一夹持器元件旋转,其中该夹持器致动器齿轮与该夹持器驱动齿轮接合;以及
506、驱动销,该驱动销在与该第一夹持器旋转轴线间隔开的位置处从该第一夹持器元件延伸,其中该驱动销延伸到形成在该夹持器驱动齿轮中的开口中。
507、实施例95.根据实施例94所述的方法,其中该容器夹持器进一步包括连接到该第一夹持器元件和该第二夹持器元件中的至少一个的弹簧,并且其中形成在该夹持器驱动齿轮中的该开口包括弓形狭槽。
508、实施例96.根据实施例90至95中任一项所述的方法,其中用夹持器推进系统将该用过的容器水平移动到该保持器架中包括:
509、线性轨道;
510、线性轴承,该线性轴承耦接到该线性轨道,其中该容器夹持器被支撑在该线性轴承上;
511、夹持器推进马达;以及
512、传动带,该传动带耦接到该夹持器推进马达并且固定到该线性轴承。
513、实施例97.根据实施例91所述的方法,其中该夹持器和由其固持的该用过的容器通过底架在该保持器架内水平移动,该底架被构造成围绕竖直定向的底架旋转轴线旋转,其中该夹持器安装支架被支撑在该底架上以与该底架一起旋转,该第一夹持器旋转轴线平行于该底架旋转轴线,并且该第二夹持器旋转轴线平行于该底架旋转轴线。
514、实施例98.一种用于将支撑在可移动载体上的流体容器定位在预定方位的机构,其中该机构包括:
515、容器定位坡道,该容器定位坡道邻近该可移动载体的一部分定位,并且被构造成当该可移动载体将容器移动到该预定方位时与支撑在该可移动载体上的该容器的底部部分接触;以及
516、容器压紧臂,该容器压紧臂被构造成相对于定位在该预定方位处的该容器进行选择性移动,其中该容器压紧臂被构造成接触定位在该预定方位处的该容器的顶部部分,并且向下推动该容器,使得该容器的该底部部分维持与该容器定位坡道接触。
517、实施例99.根据实施例98所述的机构,其中该容器定位坡道包括倾斜的第一端部、水平中心部分和倾斜的第二端部,并且其中当该容器被定位在该液位感测方位处时,该容器被定位在该水平中心部分上。
518、实施例100.根据实施例99所述的机构,该机构进一步包括辊,该辊在该倾斜的第一端部的开始处,以将容器的底部部分引导到该倾斜的第一端部上。
519、实施例101.根据实施例98至100中任一项所述的机构,该机构进一步包括:
520、马达;
521、螺纹杆,该螺纹杆可操作地耦接到该马达;以及
522、从动块,该从动块以螺纹方式耦接到螺纹杆;
523、其中该从动块接触该容器压紧臂,以当该马达移动该从动块时将该容器压紧臂从其第一位置移动到其第二位置。
524、实施例102.根据实施例101所述的机构,其中该可移动载体包含在具有该载体上方的顶部壁的外壳内,并且其中容器接近开口穿过该顶部壁形成在该预定方位上方,并且被构造成准许流体传送探针或可移除地附接到该流体传送探针的尖端进入位于该容器接近开口下方的容器,并且其中该机构进一步包括:
525、挡板,该挡板附接到该顶部壁并且可在覆盖该容器接近开口的第一位置与暴露该容器接近开口的第二位置之间移动,其中该挡板可操作地耦接到该马达,以当该马达移动该从动块以将该容器压紧臂从其第一位置到其第二位置时实现该挡板从该第一位置到该第二位置的动力移动。
526、实施例103.根据实施例98至102中任一项所述的机构,其中该可移动载体包括转盘,该转盘能够围绕竖直定向的转盘旋转轴线旋转,并且包括设置在围绕该转盘旋转轴线成角度间隔开的位置处的多个容器固持站,其中每个容器固持站包括弹簧片,这些弹簧片相对于该转盘旋转轴线横向延伸并且被构造成弹性地接合该容器固持站中所固持的容器的凹槽以将该容器保持在该容器固持站中,并且其中该容器能够在该容器固持站的这些弹簧片之间在竖直方向上滑动;并且其中
527、该容器定位坡道被设置在该转盘的一部分下方,并且被构造成当该转盘将该容器移动到该预定方位中时与容器固持站中所固持的该容器的该底部部分接触,
528、该容器与该容器定位坡道之间的接触使该容器在该容器固持站内滑动到该容器的该底部接触该容器定位坡道的位置,并且
529、该容器压紧臂被构造成接触该容器的该顶部部分以使该容器在该容器固持站内向下滑动,使得该容器的该底部部分维持与该容器定位坡道接触。
530、实施例104.一种用于固持和移动多个容器的机构,其中每个容器包括形成在该容器的相对侧上的竖直定向的凹槽,其中该机构包括被构造成能够围绕竖直定向的旋转轴线旋转的转盘,并且该转盘包括围绕该转盘的外周边周向布置的多个容器固持凹穴,其中每个容器固持凹穴在该转盘的该外周边处开放以准许容器相对于该旋转轴线在径向方向上从该凹穴中取出,并且其中每个容器固持凹穴包括保持夹,这些保持夹被构造成接合形成在该容器上的该凹槽以将该容器可移除地保持在该容器凹穴内。
531、实施例105.根据实施例104所述的机构,其中每个容器固持凹穴包括形成在该容器凹穴的开放周边端部的相对侧上的凸纹,以为夹持机构打开以将该容器固持凹穴内所固持的容器的该凹槽接合或脱离接合提供间隙。
532、实施例106.根据实施例104或105所述的机构,该机构进一步包括扫描器,该扫描器被配置成扫描关于该转盘上的容器固持凹穴中所承载的每个容器的机器可读信息。
533、实施例107.根据实施例106所述的机构,其中该扫描器包括条形码扫描器。
534、实施例108.根据实施例106或107所述的机构,该机构进一步包括设置在每个容器凹穴的壁上的机器可读标签,其中该扫描器被配置成当该容器凹穴为空时检测该机器可读标签。
535、实施例109.根据实施例104至108中任一项所述的机构,该机构进一步包括马达,该马达耦接到该转盘以实现该转盘围绕该转盘轴线的动力旋转。
536、实施例110.根据实施例104至109中任一项所述的机构,其中每个容器固持凹穴包括容器定位夹板,该容器定位夹板被构造成接合形成在定位在该容器固持凹穴内的容器中的凹口。
537、实施例111.根据实施例104至110中任一项所述的系机构,该机构进一步包括用于检测该转盘的原始旋转位置的原位传感器。
538、实施例112.一种用于固持和运输多个容器的方法,其中每个容器包括形成在该容器的相对侧上的竖直定向的凹槽,其中该方法包括:
539、将该容器运输到围绕转盘的周边形成的容器固持凹穴中,该转盘被构造成能够围绕竖直定向的旋转轴线旋转;
540、将每个容器可移除地保持在相关联的容器固持凹穴中,其中保持夹与形成在该容器上的该凹槽接合;以及
541、穿过该容器固持凹穴的开放外周边侧将每个容器从其相关联的容器固持凹穴横向移除。
542、实施例113.根据实施例112所述的方法,其中每个容器固持凹穴包括形成在该容器凹穴的该开放外周边侧的相对侧上的凸纹,并且其中将每个容器从其相关联的容器固持凹穴横向移除包括使该容器的该凹槽与通过该凸纹接近该容器的该凹槽的容器夹持器接合。
543、实施例114.根据实施例112或113所述的方法,该方法进一步包括用扫描器扫描关于该转盘上的容器固持凹穴中所承载的每个容器的机器可读信息扫描器。
544、实施例115.根据实施例114所述的方法,其中该扫描器包括条形码扫描器。
545、实施例116.根据实施例114或115所述的方法,该方法进一步包括当容器凹穴为空时用该扫描器扫描设置在该容器凹穴的壁上的机器可读标签。
546、实施例117.根据实施例112至116中任一项所述的方法,该方法进一步包括马达,该马达耦接到该转盘以实现该转盘围绕该转盘轴线的动力旋转。
547、实施例118.根据实施例112至117中任一项所述的方法,该方法进一步包括使形成在每个容器中的凹口与延伸到该容器固持凹穴中的容器定位夹板接合。
548、实施例119.一种用于多个容器的载体,其中每个容器包括形成在该容器的相对侧上的凹槽,其中该载体包括:
549、转盘,该转盘能够围绕竖直定向的转盘旋转轴线旋转,并且包括设置在围绕该转盘旋转轴线成角度间隔开的位置处的多个容器固持站,其中每个容器固持站包括弹簧片,这些弹簧片相对于该转盘旋转轴线横向延伸并且被构造成弹性地接合该容器固持站中所固持的容器的凹槽
550、以将该容器保持在该容器固持站中,其中该容器能够在该容器固持站的这些弹簧片之间在竖直方向上滑动;
551、容器定位坡道,该容器定位坡道被设置在该转盘的一部分下方,并且被构造成当该转盘将容器固持站移动到该容器定位坡道上方时与该容器固持站中所固持的容器的底部部分接触,其中该容器与该容器定位坡道之间的接触将该容器固持站内的该容器滑动到该容器的该底部接触该容器定位坡道的位置;以及
552、容器压紧臂,该容器压紧臂被构造成相对于接触该容器定位坡道的该容器进行选择性移动,其中该容器压紧臂被构造成接触该容器的顶部部分以使该容器在该容器固持站内向下滑动,使得该容器的该底部部分维持与该容器定位坡道接触。
553、实施例120.根据实施例119所述的载体,其中该转盘包括包含多对相对的、面对的弹簧片的上部夹环和包含多对相对的、面对的弹簧片的下部夹环,其中该上部夹环的每对弹簧片与该下部夹环的对应的一对弹簧片对准,以限定每个容器固持站。
554、实施例121.根据实施例120所述的载体,其中该上部夹环与该下部夹环间隔开,使得该上部夹环的每对弹簧片与该下部夹环的该对应的一对弹簧片间隔开。
555、实施例122.根据实施例119至121中任一项所述的载体,其中每个弹簧片包括朝向每对弹簧片中的该相对的、面对的弹簧片向内弯曲的转向节,并且其中每个转向节安置到设置在该固持站中的该容器的该凹槽中的一个中。
556、实施例123.根据实施例119至122中任一项所述的载体,该载体进一步包括:
557、马达;
558、螺纹杆,该螺纹杆可操作地耦接到该马达;以及
559、从动块,该从动块以螺纹方式耦接到螺纹杆;
560、其中该从动块接触该容器压紧臂,以当该马达移动该从动块时将该器压紧臂从不接触该容器的该顶部的第一位置移动到接触该容器的该顶部的第二位置。
561、实施例124.根据实施例123所述的载体,其中该容器压紧臂可枢转地安装在安装轭内,并且其中该压紧臂的第一端部与该从动块接触,并且当该第一端部与该从动块接触以枢转该压紧臂时,该压紧臂的第二端部接触该容器。
562、尽管已参考某些说明性实施例相当详细地描述和示出了本公开的主题,包含特征的各种组合和子组合,但所属领域的技术人员应易于了解本公开的范围内涵盖的其它实施例以及其变化形式和修改。此外,这类实施例、组合和子组合的描述并不意图表示所要求保护的主题需要除权利要求书中明确叙述的特征或特征组合以外的特征或特征组合。因此,本公开的范围意图包含以下所附权利要求书的范围内涵盖的所有修改和变化形式。
563、 **************************************
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!