一种无人自动化钢卷悬吊搬运防护型起重机的制作方法
1.本发明涉及一种钢卷悬吊搬运防护型起重机,尤其涉及一种无人自动化钢卷悬吊搬运防护型起重机。
背景技术:
2.钢卷的重量很重,单靠人工较难对钢卷进行搬运,从而当要对仓库内的钢卷进行整理,将放置在仓库内的钢卷移动至仓库内的另一个地方时,需要使用吊机对钢卷进行搬运。
3.经检索,公告号为cn111807210a公开了一种钢卷搬运专用起重机,该发明通过设置稳定机构和起吊机构,使钢卷在整个横向移动的过程中l型勾爪与钢卷之间不会发生剧烈晃动,避免造成l型勾爪与钢卷之间的震动伤害,使得对钢卷整个横向移动过程更加稳定。上述发明包括有两组支撑立柱、两个纵向支撑架、横向移动架、移动板、起吊机构和稳定机构,所述纵向支撑架固定连接在同组所述支撑立柱的顶部,两个所述纵向支撑架顶部的滑轨内共同滑动连接有横向移动架,所述横向移动架的两端均连接有驱动所述横向移动架前后移动的第一输送装置,所述移动板滑动连接在横向移动架顶部的轨道内壁上。虽然该专利能够实现对钢卷的起吊,也能完成在将钢卷起吊到一定高度后对物体进行固定再对钢卷进行移动,但是在对钢卷进行固定以及在提升钢卷的过程中,仅依靠一根提升绳索对钢卷进行提升,容易导致提升绳索在对钢卷进行提升的过程中,由于钢卷的重力导致提升绳索产生晃动,从而无法使得钢卷精准向上运动进入到弧形槽内进行固定,进而无法保证钢卷在横向或纵向移动过程的稳定性。
4.因此,特别需要一种能够防止钢卷在提升过程中晃动,同时能够进行稳定提升和精准定位卡紧的无人自动化钢卷悬吊搬运防护型起重机,以解决现有技术中存在的问题。
技术实现要素:
5.本发明为了克服上述专利仅依靠一根提升绳索对钢卷进行提升,钢卷容易导致提升绳索产生晃动,从而无法使得钢卷精准向上运动进行固定,进而无法保证钢卷在横向或纵向移动稳定的缺点,本发明要解决的技术问题是提供一种能够防止钢卷在提升过程中晃动,同时能够进行稳定提升和精准定位卡紧的无人自动化钢卷悬吊搬运防护型起重机。
6.为了解决上述技术问题,本发明提供了这样一种无人自动化钢卷悬吊搬运防护型起重机,包括有支架、导轨、第一滑块、安装板、控制箱、滑轨、第二滑块、双轴电机、第一接触开关、第二接触开关、第一转轴、第一传动齿轮、第二传动齿轮、第一绕线轮、第一钢丝绳、连接块、夹板、托杆、安装杆、距离传感器、电动推杆、横移组件和纵移组件,导轨设有两个,两个导轨前后对称,两个导轨底部都均匀间隔的连接有三个支架,两个导轨上均滑动式连接有一个第一滑块,两个第一滑块顶部之间连接有滑轨,滑轨上滑动式连接有第二滑块,第二滑块底部后侧连接有双轴电机,双轴电机两侧的输出轴与第二滑块转动式连接,第二滑块前侧下部转动式连接有第一转轴,第一转轴的左右两侧和双轴电机两侧的输出轴上均连接
有一个第一绕线轮,双轴电机两侧的输出轴上均连接有一个第一传动齿轮,第一传动齿轮位于双轴电机上的第一绕线轮的外侧,第一转轴的左右两侧均连接有一个第二传动齿轮,第二传动齿轮位于第一转轴上的第一绕线轮的外侧,第二传动齿轮与第一传动齿轮啮合,四个第一绕线轮上均绕有一根第一钢丝绳,四根第一钢丝绳的底端之间连接有连接块,连接块上左右对称的滑动式连接有两个夹板,两个夹板的内侧面中部均连接有一根托杆,连接块前侧面左侧连接有安装杆,安装杆底部连接有距离传感器,连接块上前后对称的安装有两个电动推杆,两个电动推杆的伸缩杆分别与两个夹板连接,左后侧和后侧中间的两个支架内侧面之间连接有安装板,安装板前侧面连接有控制箱,安装板前侧面连接有第一接触开关,第一接触开关位于控制箱的左下方,安装板前侧面连接有第二接触开关,第二接触开关位于第一接触开关的右侧,导轨上设有横移组件,横移组件与第一滑块连接,滑轨和第二滑块之间设有纵移组件;还包括有限位组件,第二滑块上设有限位组件,限位组件包括有连接架、导套和限位架,第二滑块底部前后对称的连接有两个连接架,两个连接架上左右两侧均连接有两个导套,四根第一钢丝绳分别穿过四个导套,两个连接架内侧面之间连接有限位架,限位架与连接块卡合;还包括有托住组件,连接架和连接块之间设有托住组件,托住组件包括有楔形块、卡块、弹性件、旋转套、拨板、轴杆和扭力弹簧,连接块上前后对称的连接有两个楔形块,两个连接架中部均滑动式连接有一个卡块,卡块与楔形块接触,两个卡块分别与两个连接架之间连接有两个弹性件,第一转轴的左侧和双轴电机左侧的输出轴上均连接有一个旋转套,两个旋转套上均转动式连接有一根轴杆,两根轴杆上均连接有一个拨板,拨板与旋转套接触,拨板转动能够与卡块接触,两根轴杆上均套有一个扭力弹簧,扭力弹簧的一端与旋转套连接,扭力弹簧的另一端与轴杆连接。
7.优选地,横移组件包括有第一减速电机、第二绕线轮、第三绕线轮、第二钢丝绳、第三钢丝绳、第三接触开关和第四接触开关,两个导轨的左侧均连接有一个第一减速电机,第一减速电机的输出轴与导轨转动式连接,两个第一减速电机的输出轴上均连接有一个第二绕线轮,两个第二绕线轮分别位于两个导轨内,两个导轨内的右侧均转动式连接有一个第三绕线轮,两个第二绕线轮上均连接有一根第二钢丝绳,两根第二钢丝绳的右端分别与两个第一滑块的左侧面连接,两个第二绕线轮上均绕有一根第三钢丝绳,两根第三钢丝绳的尾端分别绕过两个第三绕线轮,两根第三钢丝绳的尾端分别与两个第一滑块的右侧面连接,安装板前侧面连接有第三接触开关,第三接触开关位于第一接触开关的下侧,安装板前侧面连接有第四接触开关,第四接触开关位于第三接触开关的右侧。
8.优选地,纵移组件包括有第二减速电机、橡胶轮、橡胶条、第五接触开关和第六接触开关,第二滑块顶部右侧连接有第二减速电机,第二减速电机的输出轴上连接有橡胶轮,滑轨顶部左侧连接有橡胶条,橡胶条与橡胶轮接触,安装板前侧面连接有第五接触开关,第五接触开关位于第三接触开关的下侧,安装板前侧面连接有第六接触开关,第六接触开关位于第五接触开关的右侧。
9.优选地,还包括有承压组件,第二滑块顶部设有承压组件,承压组件包括有第二转轴和滑轮,第二滑块顶部的前后两侧均开有两个通孔,第二滑块顶部的前后两侧均转动连接有一个第二转轴,两个第二转轴上左右两侧均连接有两个滑轮,滑轮位于通孔内,滑轮与
滑轨顶部接触。
10.优选地,还包括有防刮组件,夹板和托杆之间设有防刮组件,防刮组件包括有橡胶垫、支撑辊和橡胶套,两个夹板的内侧面均连接有一块橡胶垫,两块橡胶垫上均开有一个圆孔,托杆位于圆孔内,两个夹板的内侧面均连接有两根支撑辊,支撑辊位于圆孔内,支撑辊位于托杆的外侧,两根托杆和四根支撑辊上均连接有橡胶套。
11.优选地,控制箱内安装有开关电源、电源模块和控制模块,开关电源为整个无人自动化钢卷悬吊搬运防护型起重机供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,电源模块与控制模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,第一接触开关、第二接触开关、距离传感器、第三接触开关、第四接触开关、第五接触开关和第六接触开关均与控制模块通过电性连接,电动推杆、双轴电机、第一减速电机和第二减速电机均与控制模块通过继电器控制模块连接。
12.有益效果1、本发明的第一绕线轮转动放出第一钢丝绳,在重力的作用下,连接块随之向下移动,从而夹板和托杆随之向下移动至钢卷的外侧,电动推杆的伸缩杆缩短使两个夹板向内移动夹住钢卷,两个夹板向内移动带动两根托杆向内移动穿过钢卷,第一绕线轮反向转动收回第一钢丝绳,在第一钢丝绳的拉动作用下能够使连接块向上移动复位,从而夹板和托杆随之带动钢卷向上移动,进而能够将钢卷吊起,由于夹板和托杆的配合能够顺畅将钢卷吊起防止钢卷掉落;2、本发明的第三绕线轮转动收回第二钢丝绳,通过第二钢丝绳拉动第一滑块向左移动,从而能够使第二滑块向左移动,进而能够使钢卷向左移动,达到了能够使钢卷进行横移的效果;3、本发明的橡胶轮转动时,由于橡胶条的设置,所以橡胶轮转动时能够向后移动,从而能够使第二滑块向后移动,进而能够使钢卷向后移动,达到了能够使钢卷进行纵移的效果;4、本发明的导套能够对第一钢丝绳进行导向,防止第一钢丝绳晃动,限位架能够对连接块进行限位,防止连接块晃动,从而能够防止钢卷晃动;5、本发明的卡块能够卡住楔形块将连接块固定,从而能够进一步对连接块进行限位,进而能够进一步防止钢卷晃动;6、本发明的滑轮能够减少橡胶轮的压力,能够使第二滑块更加顺畅的滑动;7、本发明的两个夹板向内移动时带动两块橡胶垫向内移动,两块橡胶垫向内移动能够将钢卷夹住,通过橡胶垫和橡胶套的配合能够对钢卷进行防护防止钢卷被刮花。
附图说明
13.图1为本发明的立体结构示意图。
14.图2为本发明的第一种部分立体结构示意图。
15.图3为本发明的第二种部分立体结构示意图。
16.图4为本发明横移组件的立体结构示意图。
17.图5为本发明横移组件部分零件与第一滑块的连接关系图。
18.图6为本发明纵移组件的立体结构示意图。
19.图7为本发明限位组件的立体结构示意图。
20.图8为本发明限位架与连接块的连接关系图。
21.图9为本发明托住组件的立体结构示意图。
22.图10为本发明托住组件部分零件的位置关系图。
23.图11为本发明托住组件部分零件的立体结构示意图。
24.图12为本发明防刮组件的立体结构示意图。
25.图13为本发明的电路框图。
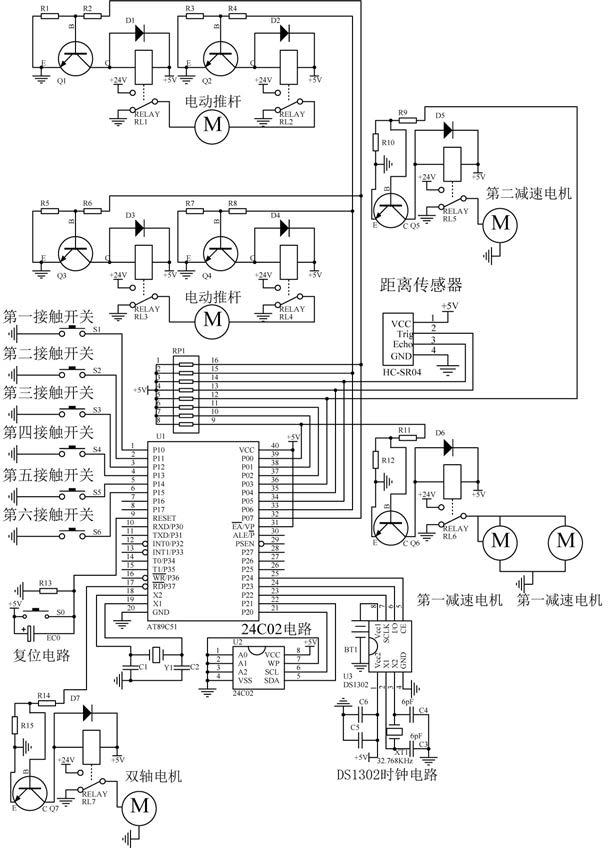
26.图14为本发明的电路原理图。
27.附图中的标记为:1-支架,2-导轨,3-第一滑块,4-安装板,5-控制箱,6-滑轨,7-第二滑块,8-双轴电机,81-第一接触开关,82-第二接触开关,9-第一转轴,10-第一传动齿轮,11-第二传动齿轮,12-第一绕线轮,13-第一钢丝绳,14-连接块,15-夹板,151-托杆,16-安装杆,17-距离传感器,18-电动推杆,19-横移组件,191-第一减速电机,192-第二绕线轮,193-第三绕线轮,194-第二钢丝绳,195-第三钢丝绳,196-第三接触开关,197-第四接触开关,20-纵移组件,201-第二减速电机,202-橡胶轮,203-橡胶条,204-第五接触开关,205-第六接触开关,21-限位组件,211-连接架,212-导套,213-限位架,22-托住组件,221-楔形块,222-卡块,223-弹性件,224-旋转套,225-拨板,226-轴杆,227-扭力弹簧,23-承压组件,231-通孔,232-第二转轴,233-滑轮,24-防刮组件,241-橡胶垫,242-支撑辊,243-橡胶套。
具体实施方式
28.下面结合附图和实施例对本发明作进一步的说明。
29.实施例1一种无人自动化钢卷悬吊搬运防护型起重机,如图1、图2、图3、图13和图14所示,包括有支架1、导轨2、第一滑块3、安装板4、控制箱5、滑轨6、第二滑块7、双轴电机8、第一接触开关81、第二接触开关82、第一转轴9、第一传动齿轮10、第二传动齿轮11、第一绕线轮12、第一钢丝绳13、连接块14、夹板15、托杆151、安装杆16、距离传感器17、电动推杆18、横移组件19和纵移组件20,导轨2设有两个,两个导轨2前后对称,两个导轨2底部都均匀间隔的连接有三个支架1,两个导轨2上均滑动式连接有一个第一滑块3,两个第一滑块3顶部之间连接有滑轨6,滑轨6上滑动式连接有第二滑块7,第二滑块7底部后侧通过螺栓连接的方式连接有双轴电机8,双轴电机8两侧的输出轴与第二滑块7转动式连接,第二滑块7前侧下部转动式连接有第一转轴9,第一转轴9的左右两侧和双轴电机8两侧的输出轴上均连接有一个第一绕线轮12,双轴电机8两侧的输出轴上均连接有一个第一传动齿轮10,第一传动齿轮10位于双轴电机8上的第一绕线轮12的外侧,第一转轴9的左右两侧均连接有一个第二传动齿轮11,第二传动齿轮11位于第一转轴9上的第一绕线轮12的外侧,第二传动齿轮11与第一传动齿轮10啮合,四个第一绕线轮12上均绕有一根第一钢丝绳13,四根第一钢丝绳13的底端之间连接有连接块14,连接块14上左右对称的滑动式连接有两个夹板15,夹板15用于夹住钢卷,两个夹板15的内侧面中部均连接有一根托杆151,托杆151用于托住钢卷,连接块14前侧面左侧连接有安装杆16,安装杆16底部连接有距离传感器17,连接块14上前后对称的安装有两个电动推杆18,两个电动推杆18的伸缩杆分别与两个夹板15连接,左后侧和后侧中间的两个支架1内侧面之间连接有安装板4,安装板4前侧面连接有控制箱5,控制箱5内安装
有开关电源、电源模块和控制模块,开关电源为整个无人自动化钢卷悬吊搬运防护型起重机供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,电源模块与控制模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,安装板4前侧面连接有第一接触开关81,第一接触开关81位于控制箱5的左下方,安装板4前侧面连接有第二接触开关82,第二接触开关82位于第一接触开关81的右侧,距离传感器17、第一接触开关81和第二接触开关82均与控制模块通过电性连接,双轴电机8和电动推杆18均与控制模块通过继电器控制模块连接,导轨2上设有横移组件19,横移组件19与第一滑块3连接,横移组件19用于驱动第一滑块3使钢卷进行横移,滑轨6和第二滑块7之间设有纵移组件20,纵移组件20用于驱动第二滑块7使钢卷进行纵移。
30.将本装置放置仓库内的合适位置,要将仓库内的钢卷悬吊搬运至仓库内的另一个地方时,按下电源总开关将本装置上电,距离传感器17随之工作,按压第一接触开关81,第一接触开关81发出信号,控制模块接收信号后控制双轴电机8输出轴转动,双轴电机8输出轴转动带动双轴电机8上的第一绕线轮12以及第一传动齿轮10转动,第一传动齿轮10转动带动第二传动齿轮11转动,第二传动齿轮11转动带动第一转轴9转动,第一转轴9转动带动其上的第一绕线轮12转动,第一绕线轮12转动放出第一钢丝绳13,在重力的作用下,连接块14随之向下移动,连接块14向下移动带动夹板15、托杆151、安装杆16、距离传感器17和电动推杆18向下移动,从而夹板15和托杆151随之向下移动至钢卷的外侧,当距离传感器17检测到与地面的距离达到预设值时,距离传感器17发出信号,控制模块接收信号后控制电动推杆18的伸缩杆缩短3秒后关闭,电动推杆18的伸缩杆缩短使两个夹板15向内移动夹住钢卷,两个夹板15向内移动带动两根托杆151向内移动,两根托杆151向内移动后穿过钢卷,此时可再次按压第一接触开关81,第一接触开关81发出信号,控制模块接收信号后控制双轴电机8关闭。然后按压第二接触开关82,第二接触开关82发出信号,控制模块接收信号后控制双轴电机8输出轴反向转动,双轴电机8输出轴反向转动带动双轴电机8上的第一绕线轮12以及第一传动齿轮10反向转动,第一传动齿轮10反向转动带动第二传动齿轮11反向转动,第二传动齿轮11反向转动带动第一转轴9反向转动,第一转轴9反向转动带动其上的第一绕线轮12反向转动,第一绕线轮12反向转动收回第一钢丝绳13,在第一钢丝绳13的拉动作用下能够使连接块14向上移动复位,连接块14向上移动复位带动夹板15、托杆151、安装杆16、距离传感器17和电动推杆18向上移动复位,夹板15和托杆151向上移动能够带动钢卷向上移动,从而能够将钢卷吊起,由于夹板15和托杆151的配合能够顺畅将钢卷吊起防止钢卷掉落,当连接块14向上移动复位后,再次按压第二接触开关82,第二接触开关82发出信号,控制模块接收信号后控制双轴电机8关闭。当要对钢卷进行横移时,启动横移组件19使第一滑块3向左移动,第一滑块3向左移动带动滑轨6向左移动,滑轨6向左移动带动第二滑块7向左移动,从而能够使钢卷向左移动,当钢卷向左移动至合适的位置后,关闭横移组件19,当要对钢卷进行纵移时,启动纵移组件20使第二滑块7向后移动,如此能够使钢卷向后移动,当钢卷向后移动至合适的位置后,关闭纵移组件20。当要将吊起的钢卷放下时,按压第一接触开关81,第一接触开关81发出信号,控制模块接收信号后控制双轴电机8输出轴转动,从而使第一绕线轮12转动放出第一钢丝绳13,在重力的作用下,连接块14随之带着夹板15、托杆151、安装杆16、距离传感器17和电动推杆18向下移动,从而能够使钢卷向下移动至地面上,当钢卷向下移动至地面上后,再次按压第一接触开关81,第一接触开关81发出信号,控制模
块接收信号后控制双轴电机8关闭,当距离传感器17检测到与地面的距离达到预设值时,距离传感器17发出信号,控制模块接收信号后控制电动推杆18的伸缩杆伸长3秒后关闭,电动推杆18的伸缩杆伸长使两个夹板15向外移动松开钢卷,两个夹板15向外移动带动两根托杆151向外移动,两根托杆151向外移动后与钢卷分离。当要使连接块14向上移动复位时,按压第二接触开关82,第二接触开关82发出信号,控制模块接收信号后控制双轴电机8输出轴反向转动,从而能够使连接块14向上移动复位,连接块14向上移动复位后再次第二接触开关82,第二接触开关82发出信号,控制模块接收信号后控制双轴电机8关闭,当要使第二滑块7向右移动时,启动横移组件19使第一滑块3向右移动,第一滑块3向右移动带动滑轨6向右移动,滑轨6向右移动带动第二滑块7向右移动,当第二滑块7向右移动至合适的位置后,关闭横移组件19,当要使第二滑块7向前移动时,启动纵移组件20使第二滑块7向前移动,当第二滑块7向前移动至合适的位置后,关闭纵移组件20,重复上述操作,能够重复进行钢卷搬运工作,当无需使用本装置时,再次按下电源总开关将本装置断电即可。
31.实施例2在实施例1的基础之上,如图1、图4和图5所示,横移组件19包括有第一减速电机191、第二绕线轮192、第三绕线轮193、第二钢丝绳194、第三钢丝绳195、第三接触开关196和第四接触开关197,两个导轨2的左侧均通过螺栓连接的方式连接有一个第一减速电机191,第一减速电机191的输出轴与导轨2转动式连接,第一减速电机191与控制模块通过继电器控制模块连接,两个第一减速电机191的输出轴上均连接有一个第二绕线轮192,两个第二绕线轮192分别位于两个导轨2内,两个导轨2内的右侧均转动式连接有一个第三绕线轮193,两个第二绕线轮192上均连接有一根第二钢丝绳194,两根第二钢丝绳194的右端分别与两个第一滑块3的左侧面连接,两个第二绕线轮192上均绕有一根第三钢丝绳195,两根第三钢丝绳195的尾端分别绕过两个第三绕线轮193,两根第三钢丝绳195的尾端分别与两个第一滑块3的右侧面连接,安装板4前侧面连接有第三接触开关196,第三接触开关196位于第一接触开关81的下侧,安装板4前侧面连接有第四接触开关197,第四接触开关197位于第三接触开关196的右侧,第三接触开关196和第四接触开关197均与控制模块通过电性连接。
32.当要对钢卷进行横移时,按压第三接触开关196,第三接触开关196发出信号,控制模块接收信号后控制第一减速电机191转动,第一减速电机191输出轴转动带动第二绕线轮192转动,第二绕线轮192转动收回第二钢丝绳194,且第二绕线轮192转动放出第三钢丝绳195,通过第二钢丝绳194拉动第一滑块3向左移动,第一滑块3向左移动带动滑轨6向左移动,滑轨6向左移动带动第二滑块7向左移动,从而能够使钢卷向左移动,当钢卷向左移动至合适的位置后,再次按压第三接触开关196,第三接触开关196发出信号,控制模块接收信号后控制第一减速电机191关闭;当钢卷被放下后,需要使第二滑块7向右移动时,按压第四接触开关197,第四接触开关197发出信号,控制模块接收信号后控制第一减速电机191输出轴反向转动,第一减速电机191输出轴反向转动带动第二绕线轮192反向转动,第三绕线轮193反向转动放出第二钢丝绳194,且第三绕线轮193反向转动收回第三钢丝绳195,通过第三钢丝绳195拉动第一滑块3向右移动,第一滑块3向右移动带动滑轨6向右移动,滑轨6向右移动带动第二滑块7向右移动,当第二滑块7向右移动至合适的位置后,再次按压第四接触开关197,第四接触开关197发出信号,控制模块接收信号后控制第一减速电机191关闭。
33.如图1和图6所示,纵移组件20包括有第二减速电机201、橡胶轮202、橡胶条203、第
五接触开关204和第六接触开关205,第二滑块7顶部右侧通过螺栓连接的方式连接有第二减速电机201,第二减速电机201与控制模块通过继电器控制模块连接,第二减速电机201的输出轴上连接有橡胶轮202,滑轨6顶部左侧连接有橡胶条203,橡胶条203与橡胶轮202接触,安装板4前侧面连接有第五接触开关204,第五接触开关204位于第三接触开关196的下侧,安装板4前侧面连接有第六接触开关205,第六接触开关205位于第五接触开关204的右侧,第五接触开关204和第六接触开关205均与控制模块通过电性连接。
34.初始时,第二滑块7位于前侧,当要对钢卷进行纵移时,按压第五接触开关204,第五接触开关204发出信号,控制模块接收信号后控制第二减速电机201输出轴转动,第二减速电机201输出轴转动带动橡胶轮202转动,由于橡胶条203的设置,所以橡胶轮202转动时能够向后移动,橡胶轮202向后移动带动第二减速电机201向后移动,第二减速电机201向后移动带动第二滑块7向后移动,从而能够使钢卷向后移动,当钢卷向后移动至合适的位置后,再次按压第五接触开关204,第五接触开关204发出信号,控制模块接收信号后控制第二减速电机201关闭;当钢卷被放下后,需要使第二滑块7向前移动时,按压第六接触开关205,第六接触开关205发出信号,控制模块接收信号后控制第二减速电机201输出轴反向转动,第二减速电机201反向转动带动橡胶轮202反向转动,由于橡胶条203的设置,所以橡胶轮202反向转动时能够向前移动,橡胶轮202向前移动带动第二减速电机201向前移动,第二减速电机201向前移动带动第二滑块7向前移动,当第二滑块7向前移动至合适的位置后,再次按压第六接触开关205,第六接触开关205发出信号,控制模块接收信号后控制第二减速电机201关闭。
35.实施例3在实施例2的基础之上,如图1、图7和图8所示,还包括有限位组件21,第二滑块7上设有限位组件21,限位组件21用于对第一钢丝绳13进行导向以及用于对连接块14进行限位防止钢卷晃动,限位组件21包括有连接架211、导套212和限位架213,第二滑块7底部前后对称的通过螺栓连接的方式连接有两个连接架211,两个连接架211上左右两侧均连接有两个导套212,四根第一钢丝绳13分别穿过四个导套212,导套212用于对第一钢丝绳13进行导向防止钢卷晃动,两个连接架211内侧面之间连接有限位架213,限位架213与连接块14卡合,限位架213用于对连接块14进行限位防止钢卷晃动。
36.通过导套212能够对第一钢丝绳13进行导向,从而能够防止第一钢丝绳13晃动,进而能够防止钢卷晃动,当连接块14向上移动复位后,连接块14与限位架213卡合,通过限位架213能够对连接块14进行限位,防止连接块14晃动,从而能够进一步防止钢卷晃动。
37.实施例4在实施例3的基础之上,如图1、图9、图10和图11所示,还包括有托住组件22,连接架211和连接块14之间设有托住组件22,托住组件22用于托住连接块14进一步防止钢卷晃动,托住组件22包括有楔形块221、卡块222、弹性件223、旋转套224、拨板225、轴杆226和扭力弹簧227,连接块14上前后对称的连接有两个楔形块221,两个连接架211中部均滑动式连接有一个卡块222,卡块222与楔形块221接触,卡块222用于撑住楔形块221从而对连接块14进行限位,两个卡块222分别与两个连接架211之间连接有两个弹性件223,第一转轴9的左侧和双轴电机8左侧的输出轴上均连接有一个旋转套224,两个旋转套224上均转动式连接有一根轴杆226,两根轴杆226上均连接有一个拨板225,拨板225与旋转套224接触,拨板225
转动能够与卡块222接触,两根轴杆226上均套有一个扭力弹簧227,扭力弹簧227的一端与旋转套224连接,扭力弹簧227的另一端与轴杆226连接。
38.初始时,卡块222卡住楔形块221将连接块14固定,当双轴电机8和第一转轴9转动时带动旋转套224转动、旋转套224转动带动轴杆226、扭力弹簧227和拨板225转动,此时,由于旋转套224会将拨板225抵住,所以拨板225不会向远离卡块222的方向转动,从而拨板225转动挤压卡块222向内移动,弹性件223随之拉伸,卡块222向内移动后松开楔形块221,从而将连接块14松开,连接块14随之能够向下移动,当拨板225转动至与卡块222脱离时,在弹性件223的作用下,能够使卡块222向外移动复位,当双轴电机8输出轴和第一转轴9反向转动时带动旋转套224反向转动,旋转套224反向转动带动轴杆226、扭力弹簧227和拨板225反向转动,此时,由于旋转套224不会将拨板225抵住,所以拨板225反向转动至与卡块222接触时,在卡块222的挤压作用下,能够使拨板225向远离卡块222的方向转动,轴杆226随之转动,扭力弹簧227随之压缩,当拨板225反向转动至与卡块222脱离时,在扭力弹簧227的作用下,能够使轴杆226带着拨板225转动复位,当连接块14向上移动复位时带动楔形块221向上移动复位,当楔形块221向上移动至与卡块222接触时,在楔形块221的挤压作用下,能够使卡块222向内移动,弹性件223随之拉伸,当楔形块221与卡块222脱离后,在弹性件223的作用下,能够使卡块222向外移动复位重新卡住楔形块221,从而能够将连接块14固定,进而能够进一步对连接块14进行限位,能够再进一步防止钢卷晃动。
39.实施例5在实施例4的基础之上,如图1和图9所示,还包括有承压组件23,第二滑块7顶部设有承压组件23,承压组件23用于使第二滑块7更加顺畅的滑动,承压组件23包括有第二转轴232和滑轮233,第二滑块7顶部的前后两侧均开有两个通孔231,第二滑块7顶部的前后两侧均通过轴承连接有一个第二转轴232,两个第二转轴232上左右两侧均连接有两个滑轮233,滑轮233位于通孔231内,滑轮233与滑轨6顶部接触。
40.当第二滑块7向后移动时,滑轮233随之转动,当第二滑块7向前移动时,滑轮233随之反向转动,从而通过滑轮233能够减少橡胶轮202的压力,能够使第二滑块7更加顺畅的滑动。
41.如图1和图12所示,还包括有防刮组件24,夹板15和托杆151之间设有防刮组件24,防刮组件24用于保护钢卷防止钢卷被刮花,防刮组件24包括有橡胶垫241、支撑辊242和橡胶套243,两个夹板15的内侧面均连接有一块橡胶垫241,两块橡胶垫241上均开有一个圆孔,托杆151位于圆孔内,两个夹板15的内侧面均连接有两根支撑辊242,支撑辊242位于圆孔内,支撑辊242位于托杆151的外侧,两根托杆151和四根支撑辊242上均连接有橡胶套243。
42.两个夹板15向内移动时带动两块橡胶垫241向内移动,两块橡胶垫241向内移动能够将钢卷夹住,且两个夹板15向内移动时还带动支撑辊242向内移动,支撑辊242向内移动后穿过钢卷,通过橡胶垫241和橡胶套243的配合能够对钢卷进行防护防止钢卷被刮花。
43.以上所述实施例仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形、改进及替代,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1